1.本发明涉及风力发电的技术领域,尤其是指一种风电机组在极限阵风下的降载控制方法、系统、存储介质及计算设备。
背景技术:
2.在碳中和的背景下,风力发电技术取得了显著的成果,且向着高效率、高可靠性、低成本、智慧化快速发展,风电机组也向着大型化、高塔架、轻量化、智能化迈进。因此,在风电机组设计之初,必须采用一些新的控制技术和方法,以使机组的各个部件的载荷达到最优。针对风电机组的极限阵风风况,风机常出现叶片极限载荷、轮毂极限载荷、偏航极限载荷和塔架极限载荷。然而,现有的比例积分控制和非线性增益控制方法,都不能有效解决风电机组在阵风下极限载荷大的问题。为此,需要提出一种针对极限阵风风况的降载控制方案。
技术实现要素:
3.本发明的第一目的在于克服现有技术的缺点与不足,提供一种风电机组在极限阵风下的降载控制方法,可有效降低风电机组在极限阵风下的部件载荷,实现机组的轻量化设计。
4.本发明的第二目的在于提供一种风电机组在极限阵风下的降载控制系统。
5.本发明的第三目的在于提供一种存储介质。
6.本发明的第四目的在于提供一种计算设备。
7.本发明的第一目的通过下述技术方案实现:一种风电机组在极限阵风下的降载控制方法,包括:
8.阵风优先变桨:通过对当前风轮转速偏差和风轮转速偏差变化率的判断,当超过设定阈值的时候,在变桨指令上叠加附加变桨速率;
9.阵风超速抑制:通过对当前机舱加速度的判断,当机舱加速度超过阈值,延时一段时间之后,风轮转速大于风轮额定转速且风轮加速度大于阈值时,变桨指令上叠加附加变桨速率;
10.非线性转速设定:通过对机舱风向仪测量的偏航误差判断,当偏航误差超过偏航误差阈值,则降低风轮转速的设定值,即降低叶轮转速,以降低风电机组的载荷。
11.优选的,在阵风优先变桨中,风电机组在阵风工况下,风轮感受到的平均风速在短时间内从额定风速达到切出风速,风轮转速明显增加,且转速呈现加速上升趋势;此时,将风轮转速减去额定转速定义为风轮转速偏差,如果当前的风轮转速偏差与风轮转速偏差变化率的乘积超过设定阈值,则判断为阵风工况,在变桨指令上叠加一个附加变桨速率,具体如下:
12.首先,定义风轮转速偏差如下:
[0013][0014]
式中,δωr表示风轮转速偏差;ωr表示滤除高频噪声后的风轮转速;ω
rated
表示风轮额定转速;if表示后面的为判断条件;else表示其它情况;如果风轮转速ωr高于风轮额定转速ω
rated
时,风轮转速偏差δωr等于风轮转速与风轮额定转速的差,即ω
r-ω
rated
,否则风轮转速偏差δωr等于0;
[0015]
基于风轮转速偏差,定义风轮转速偏差变化率如下:
[0016][0017]
式中,表示风轮转速偏差变化率;d(δωr)/dt表示风轮转速偏差对时间t的导数;如果风轮转速偏差δωr加速上升时,风轮转速偏差变化率等于风轮转速偏差对时间t的导数,否则风轮转速偏差变化率等于0。
[0018]
基于风轮转速偏差和风轮转速偏差变化率,定义优先变桨附加变桨速率如下:
[0019][0020]
式中,δ表示优先变桨附加变桨速率;δe表示优先变桨附加变桨速率预设值;e
β
表示转速偏差与转速偏差变化率乘积的最大阈值,此阈值随平均变桨角度的改变而变化;pe表示当前的发电机测量功率;k表示功率系数,参数设置在0到1区间内;p
rated
表示发电机额定功率;and表示逻辑与运算;
[0021]
最后,附加变桨速率叠加到变桨指令上,如下:
[0022][0023]
式中,β1表示传输到叶片1变桨系统的变桨角度指令;β2表示传输到叶片2变桨系统的变桨角度指令;β3表示传输到叶片3变桨系统的变桨角度指令;表示控制器输出的叶片1的变桨角度指令;表示控制器输出的叶片2的变桨角度指令;表示控制器输出的叶片3的变桨角度指令;∫δdt表示优先变桨附加变桨速率积分成附加变桨角度。
[0024]
优选的,在阵风超速抑制中,风电机组在阵风工况下,风轮感受到的平均风速在短时间内从额定风速达到切出风速,此时机舱加速度将明显增加,且转速呈现加速上升趋势,由于机舱加速度对阵风的响应更快,因此用机舱加速度作为预判条件,在延时时间之后监测风轮转速是否有加速趋势,若超出阈值则在变桨指令上叠加附加变桨速率,具体如下:
[0025]
延时时间通过计时器实现,当机舱加速度超过加速度阈值时,计时器开始计时;当机舱加速度低于加速度阈值时,计时器初始化为零;其中,机舱加速度作为预判条件的计时器定义如下:
[0026][0027]
式中,tn表示计时器在n时刻的时间;t
n-1
表示计时器在n-1时刻的时间;δt表示从n-1到n时刻的时间步长;表示机舱前后方向加速度;m
fa
表示机舱前后加速度阈值;if表示后面的为判断条件;else表示其它情况;
[0028]
基于计时器和风轮转速偏差变化率,定义超速抑制附加变桨速率如下:
[0029][0030]
式中,λ表示超速抑制附加变桨速率;λe表示超速抑制附加变桨速率预设值;表示风轮转速偏差变化率;h
β
表示风轮转速偏差变化率阈值;te表示计时器的时间阈值;and表示逻辑与运算;
[0031]
最后,附加变桨速率叠加到变桨指令上,如下:
[0032][0033]
式中,β1表示传输到叶片1变桨系统的变桨角度指令;β2表示传输到叶片2变桨系统的变桨角度指令;β3表示传输到叶片3变桨系统的变桨角度指令;表示控制器输出的叶片1的变桨角度指令;表示控制器输出的叶片2的变桨角度指令;表示控制器输出的叶片3的变桨角度指令;∫λdt表示超速抑制附加变桨速率积分成附加变桨角度。
[0034]
优选的,在非线性转速设定中,机舱风向仪测量到偏航误差角超过阈值时,风轮的朝向与风向出现大偏差,此时风轮不正对风,风轮受到不平衡弯矩大,而通过降低叶轮转速,风轮受到的载荷将同步降低;当风轮偏航最终对风,此时偏航误差减小,风轮转速恢复到额定转速运行;其中,定义叶轮转速设定值如下:
[0035][0036]
式中,ω
set
表示叶轮转速设定值;ω
rated
表示叶轮额定转速;φ表示机舱风向仪测量的偏航误差经过低通滤波后的偏航误差角;f(φ)表示转速设定值非线性部分,为一个查表函数,根据偏航误差角查表转速设定值偏移量;abs(φ)表示偏航误差角的绝对值;φe表示偏航误差角绝对值的阈值;if表示后面的为判断条件;else表示其它情况。
[0037]
本发明的第二目的通过下述技术方案实现:一种风电机组在极限阵风下的降载控制系统,包括:
[0038]
阵风优先变桨模块,通过对当前风轮转速偏差和风轮转速偏差变化率的判断,当超过设定阈值的时候,在变桨指令上叠加附加变桨速率;
[0039]
阵风超速抑制模块,通过对当前机舱加速度的判断,当机舱加速度超过阈值,延时一段时间之后,风轮转速大于风轮额定转速且风轮加速度大于阈值时,变桨指令上叠加附
加变桨速率;
[0040]
非线性转速设定模块,通过对机舱风向仪测量的偏航误差判断,当偏航误差超过偏航误差阈值,则降低风轮转速的设定值,即降低叶轮转速,以降低风电机组的载荷。
[0041]
优选的,在阵风优先变桨模块中,风电机组在阵风工况下,风轮感受到的平均风速在短时间内从额定风速达到切出风速,风轮转速明显增加,且转速呈现加速上升趋势;此时,将风轮转速减去额定转速定义为风轮转速偏差,如果当前的风轮转速偏差与风轮转速偏差变化率的乘积超过设定阈值,则判断为阵风工况,在变桨指令上叠加一个附加变桨速率,具体如下:
[0042]
首先,定义风轮转速偏差如下:
[0043][0044]
式中,δωr表示风轮转速偏差;ωr表示滤除高频噪声后的风轮转速;ω
rated
表示风轮额定转速;if表示后面的为判断条件;else表示其它情况;如果风轮转速ωr高于风轮额定转速ω
rated
时,风轮转速偏差δωr等于风轮转速与风轮额定转速的差,即ω
r-ω
rated
,否则风轮转速偏差δωr等于0;
[0045]
基于风轮转速偏差,定义风轮转速偏差变化率如下:
[0046][0047]
式中,表示风轮转速偏差变化率;d(δωr)/dt表示风轮转速偏差对时间t的导数;如果风轮转速偏差δωr加速上升时,风轮转速偏差变化率等于风轮转速偏差对时间t的导数,否则风轮转速偏差变化率等于0。
[0048]
基于风轮转速偏差和风轮转速偏差变化率,定义优先变桨附加变桨速率如下:
[0049][0050]
式中,δ表示优先变桨附加变桨速率;δe表示优先变桨附加变桨速率预设值;e
β
表示转速偏差与转速偏差变化率乘积的最大阈值,此阈值随平均变桨角度的改变而变化;pe表示当前的发电机测量功率;k表示功率系数,参数设置在0到1区间内;p
rated
表示发电机额定功率;and表示逻辑与运算;
[0051]
最后,附加变桨速率叠加到变桨指令上,如下:
[0052][0053]
式中,β1表示传输到叶片1变桨系统的变桨角度指令;β2表示传输到叶片2变桨系统的变桨角度指令;β3表示传输到叶片3变桨系统的变桨角度指令;表示控制器输出的叶片1的变桨角度指令;表示控制器输出的叶片2的变桨角度指令;表示控制器输出的叶片
3的变桨角度指令;∫δdt表示优先变桨附加变桨速率积分成附加变桨角度。
[0054]
优选的,在阵风超速抑制模块中,风电机组在阵风工况下,风轮感受到的平均风速在短时间内从额定风速达到切出风速,此时机舱加速度将明显增加,且转速呈现加速上升趋势,由于机舱加速度对阵风的响应更快,因此用机舱加速度作为预判条件,在延时时间之后监测风轮转速是否有加速趋势,若超出阈值则在变桨指令上叠加附加变桨速率,具体如下:
[0055]
延时时间通过计时器实现,当机舱加速度超过加速度阈值时,计时器开始计时;当机舱加速度低于加速度阈值时,计时器初始化为零;其中,机舱加速度作为预判条件的计时器定义如下:
[0056][0057]
式中,tn表示计时器在n时刻的时间;t
n-1
表示计时器在n-1时刻的时间;δt表示从n-1到n时刻的时间步长;表示机舱前后方向加速度;m
fa
表示机舱前后加速度阈值;if表示后面的为判断条件;else表示其它情况;
[0058]
基于计时器和风轮转速偏差变化率,定义超速抑制附加变桨速率如下:
[0059][0060]
式中,λ表示超速抑制附加变桨速率;λe表示超速抑制附加变桨速率预设值;表示风轮转速偏差变化率;h
β
表示风轮转速偏差变化率阈值;te表示计时器的时间阈值;and表示逻辑与运算;
[0061]
最后,附加变桨速率叠加到变桨指令上,如下:
[0062][0063]
式中,β1表示传输到叶片1变桨系统的变桨角度指令;β2表示传输到叶片2变桨系统的变桨角度指令;β3表示传输到叶片3变桨系统的变桨角度指令;表示控制器输出的叶片1的变桨角度指令;表示控制器输出的叶片2的变桨角度指令;表示控制器输出的叶片3的变桨角度指令;∫λdt表示超速抑制附加变桨速率积分成附加变桨角度。
[0064]
优选的,在非线性转速设定模块中,机舱风向仪测量到偏航误差角超过阈值时,风轮的朝向与风向出现大偏差,此时风轮不正对风,风轮受到不平衡弯矩大,而通过降低叶轮转速,风轮受到的载荷将同步降低;当风轮偏航最终对风,此时偏航误差减小,风轮转速恢复到额定转速运行;其中,定义叶轮转速设定值如下:
[0065][0066]
式中,ω
set
表示叶轮转速设定值;ω
rated
表示叶轮额定转速;φ表示机舱风向仪测
量的偏航误差经过低通滤波后的偏航误差角;f(φ)表示转速设定值非线性部分,为一个查表函数,根据偏航误差角查表转速设定值偏移量;abs(φ)表示偏航误差角的绝对值;φe表示偏航误差角绝对值的阈值;if表示后面的为判断条件;else表示其它情况。
[0067]
本发明的第三目的通过下述技术方案实现:一种存储介质,存储有程序,所述程序被处理器执行时,实现上述的风电机组在极限阵风下的降载控制方法。
[0068]
本发明的第四目的通过下述技术方案实现:一种计算设备,包括处理器以及用于存储处理器可执行程序的存储器,所述处理器执行存储器存储的程序时,实现上述的风电机组在极限阵风下的降载控制方法。
[0069]
本发明与现有技术相比,具有如下优点与有益效果:
[0070]
1、本发明针对风电机组在极限阵风的工况下,基于对风轮转速偏差、机舱加速度和偏航误差变化的判断,提出一种降载控制方法,能够降低叶轮、偏航轴承及塔架极限载荷。
[0071]
2、本发明所提出的降载控制方法,基于风电机组现有传感器,包括叶轮转速传感器、机舱加速度传感器和风向仪传感器,无需增加额外测量传感器,不增加硬件成本。
附图说明
[0072]
图1为本发明系统的架构图。
具体实施方式
[0073]
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
[0074]
实施例1
[0075]
本实施例公开了一种风电机组在极限阵风下的降载控制方法,其具体情况如下:
[0076]
a、阵风优先变桨:通过对当前风轮转速偏差和风轮转速偏差变化率的判断,当超过设定阈值的时候,在变桨指令上叠加附加变桨速率。
[0077]
风电机组在阵风工况下,风轮感受到的平均风速在短时间内从额定风速达到切出风速,风轮转速明显增加,且转速呈现加速上升趋势;此时,将风轮转速减去额定转速定义为风轮转速偏差,如果当前的风轮转速偏差与风轮转速偏差变化率的乘积超过设定阈值,则判断为阵风工况,在变桨指令上叠加一个附加变桨速率,具体如下:
[0078]
首先,定义风轮转速偏差如下:
[0079][0080]
式中,δωr表示风轮转速偏差;ωr表示滤除高频噪声后的风轮转速;ω
rated
表示风轮额定转速;if表示后面的为判断条件;else表示其它情况;如果风轮转速ωr高于风轮额定转速ω
rated
时,风轮转速偏差δωr等于风轮转速与风轮额定转速的差,即ω
r-ω
rated
,否则风轮转速偏差δωr等于0;
[0081]
基于风轮转速偏差,定义风轮转速偏差变化率如下:
[0082][0083]
式中,表示风轮转速偏差变化率;d(δωr)/dt表示风轮转速偏差对时间t的导数;如果风轮转速偏差δωr加速上升时,风轮转速偏差变化率等于风轮转速偏差对时间t的导数,否则风轮转速偏差变化率等于0。
[0084]
基于风轮转速偏差和风轮转速偏差变化率,定义优先变桨附加变桨速率如下:
[0085][0086]
式中,δ表示优先变桨附加变桨速率;δe表示优先变桨附加变桨速率预设值;e
β
表示转速偏差与转速偏差变化率乘积的最大阈值,此阈值随平均变桨角度的改变而变化,通过当前变桨角度查表得到当前阈值e
β
;pe表示当前的发电机测量功率;k表示功率系数,参数设置在0到1区间内;p
rated
表示发电机额定功率;and表示逻辑与运算;
[0087]
最后,附加变桨速率叠加到变桨指令上,如下:
[0088][0089]
式中,β1表示传输到叶片1变桨系统的变桨角度指令;β2表示传输到叶片2变桨系统的变桨角度指令;β3表示传输到叶片3变桨系统的变桨角度指令;表示控制器输出的叶片1的变桨角度指令;表示控制器输出的叶片2的变桨角度指令;表示控制器输出的叶片3的变桨角度指令;∫δdt表示优先变桨附加变桨速率积分成附加变桨角度。
[0090]
b、阵风超速抑制:通过对当前机舱加速度的判断,当机舱加速度超过阈值,延时一段时间之后,风轮转速大于风轮额定转速且风轮加速度大于阈值时,变桨指令上叠加附加变桨速率。
[0091]
风电机组在阵风工况下,风轮感受到的平均风速在短时间内从额定风速达到切出风速,此时机舱加速度将明显增加,且转速呈现加速上升趋势,由于机舱加速度对阵风的响应更快,因此用机舱加速度作为预判条件,在延时时间之后监测风轮转速是否有加速趋势,若超出阈值则在变桨指令上叠加附加变桨速率,具体如下:
[0092]
延时时间通过计时器实现,当机舱加速度超过加速度阈值时,计时器开始计时;当机舱加速度低于加速度阈值时,计时器初始化为零;其中,机舱加速度作为预判条件的计时器定义如下:
[0093][0094]
式中,tn表示计时器在n时刻的时间;t
n-1
表示计时器在n-1时刻的时间;δt表示从n-1到n时刻的时间步长;表示机舱前后方向加速度;m
fa
表示机舱前后加速度阈值;if表示后面的为判断条件;else表示其它情况;
[0095]
基于计时器和风轮转速偏差变化率,定义超速抑制附加变桨速率如下:
[0096][0097]
式中,λ表示超速抑制附加变桨速率;λe表示超速抑制附加变桨速率预设值;表示风轮转速偏差变化率;h
β
表示风轮转速偏差变化率阈值;te表示计时器的时间阈值;and表示逻辑与运算;
[0098]
最后,附加变桨速率叠加到变桨指令上,如下:
[0099][0100]
式中,β1表示传输到叶片1变桨系统的变桨角度指令;β2表示传输到叶片2变桨系统的变桨角度指令;β3表示传输到叶片3变桨系统的变桨角度指令;表示控制器输出的叶片1的变桨角度指令;表示控制器输出的叶片2的变桨角度指令;表示控制器输出的叶片3的变桨角度指令;∫λdt表示超速抑制附加变桨速率积分成附加变桨角度。
[0101]
c、非线性转速设定:通过对机舱风向仪测量的偏航误差判断,当偏航误差超过偏航误差阈值,则降低风轮转速的设定值,即降低叶轮转速,以降低风电机组的载荷。
[0102]
机舱风向仪测量到偏航误差角超过阈值时,风轮的朝向与风向出现较大偏差,此时风轮不正对风,风轮受到不平衡弯矩较大,而通过降低叶轮转速,风轮受到的载荷将同步降低;当风轮偏航最终对风,此时偏航误差减小,风轮转速恢复到额定转速运行;其中,定义叶轮转速设定值如下:
[0103][0104]
式中,ω
set
表示叶轮转速设定值;ω
rated
表示叶轮额定转速;φ表示机舱风向仪测量的偏航误差经过低通滤波后的偏航误差角;f(φ)表示转速设定值非线性部分,为一个查表函数,根据偏航误差角查表转速设定值偏移量;abs(φ)表示偏航误差角的绝对值;φe表示偏航误差角绝对值的阈值;if表示后面的为判断条件;else表示其它情况。
[0105]
实施例2
[0106]
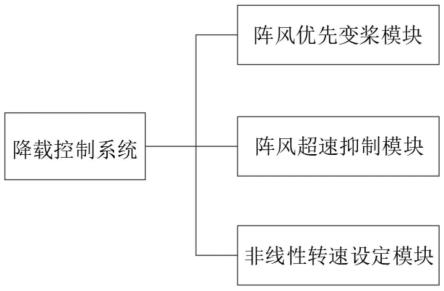
本实施例公开了一种风电机组在极限阵风下的降载控制系统,参见图1所示,该系统包括以下功能模块:
[0107]
阵风优先变桨模块,通过对当前风轮转速偏差和风轮转速偏差变化率的判断,当超过设定阈值的时候,在变桨指令上叠加附加变桨速率;
[0108]
阵风超速抑制模块,通过对当前机舱加速度的判断,当机舱加速度超过阈值,延时一段时间之后,风轮转速大于风轮额定转速且风轮加速度大于阈值时,变桨指令上叠加附加变桨速率;
[0109]
非线性转速设定模块,通过对机舱风向仪测量的偏航误差判断,当偏航误差超过偏航误差阈值,则降低风轮转速的设定值,即降低叶轮转速,以降低风电机组的载荷。
[0110]
优选的,在阵风优先变桨模块中,风电机组在阵风工况下,风轮感受到的平均风速在短时间内从额定风速达到切出风速,风轮转速明显增加,且转速呈现加速上升趋势;此时,将风轮转速减去额定转速定义为风轮转速偏差,如果当前的风轮转速偏差与风轮转速偏差变化率的乘积超过设定阈值,则判断为阵风工况,在变桨指令上叠加一个附加变桨速率,具体如下:
[0111]
首先,定义风轮转速偏差如下:
[0112][0113]
式中,δωr表示风轮转速偏差;ωr表示滤除高频噪声后的风轮转速;ω
rated
表示风轮额定转速;if表示后面的为判断条件;else表示其它情况;如果风轮转速ωr高于风轮额定转速ω
rated
时,风轮转速偏差δωr等于风轮转速与风轮额定转速的差,即ω
r-ω
rated
,否则风轮转速偏差δωr等于0;
[0114]
基于风轮转速偏差,定义风轮转速偏差变化率如下:
[0115][0116]
式中,表示风轮转速偏差变化率;d(δωr)/dt表示风轮转速偏差对时间t的导数;如果风轮转速偏差δωr加速上升时,风轮转速偏差变化率等于风轮转速偏差对时间t的导数,否则风轮转速偏差变化率等于0。
[0117]
基于风轮转速偏差和风轮转速偏差变化率,定义优先变桨附加变桨速率如下:
[0118][0119]
式中,δ表示优先变桨附加变桨速率;δe表示优先变桨附加变桨速率预设值;e
β
表示转速偏差与转速偏差变化率乘积的最大阈值,此阈值随平均变桨角度的改变而变化,通过当前变桨角度查表得到当前阈值e
β
;pe表示当前的发电机测量功率;k表示功率系数,参数设置在0到1区间内;p
rated
表示发电机额定功率;and表示逻辑与运算;
[0120]
最后,附加变桨速率叠加到变桨指令上,如下:
[0121][0122]
式中,β1表示传输到叶片1变桨系统的变桨角度指令;β2表示传输到叶片2变桨系统的变桨角度指令;β3表示传输到叶片3变桨系统的变桨角度指令;表示控制器输出的叶片1的变桨角度指令;表示控制器输出的叶片2的变桨角度指令;表示控制器输出的叶片3的变桨角度指令;∫δdt表示优先变桨附加变桨速率积分成附加变桨角度。
[0123]
优选的,在阵风超速抑制模块中,风电机组在阵风工况下,风轮感受到的平均风速在短时间内从额定风速达到切出风速,此时机舱加速度将明显增加,且转速呈现加速上升
趋势,由于机舱加速度对阵风的响应更快,因此用机舱加速度作为预判条件,在延时时间之后监测风轮转速是否有加速趋势,若超出阈值则在变桨指令上叠加附加变桨速率,具体如下:
[0124]
延时时间通过计时器实现,当机舱加速度超过加速度阈值时,计时器开始计时;当机舱加速度低于加速度阈值时,计时器初始化为零;其中,机舱加速度作为预判条件的计时器定义如下:
[0125][0126]
式中,tn表示计时器在n时刻的时间;t
n-1
表示计时器在n-1时刻的时间;δt表示从n-1到n时刻的时间步长;表示机舱前后方向加速度;m
fa
表示机舱前后加速度阈值;if表示后面的为判断条件;else表示其它情况;
[0127]
基于计时器和风轮转速偏差变化率,定义超速抑制附加变桨速率如下:
[0128][0129]
式中,λ表示超速抑制附加变桨速率;λe表示超速抑制附加变桨速率预设值;表示风轮转速偏差变化率;h
β
表示风轮转速偏差变化率阈值;te表示计时器的时间阈值;and表示逻辑与运算;
[0130]
最后,附加变桨速率叠加到变桨指令上,如下:
[0131][0132]
式中,β1表示传输到叶片1变桨系统的变桨角度指令;β2表示传输到叶片2变桨系统的变桨角度指令;β3表示传输到叶片3变桨系统的变桨角度指令;表示控制器输出的叶片1的变桨角度指令;表示控制器输出的叶片2的变桨角度指令;表示控制器输出的叶片3的变桨角度指令;∫λdt表示超速抑制附加变桨速率积分成附加变桨角度。
[0133]
优选的,在非线性转速设定模块中,机舱风向仪测量到偏航误差角超过阈值时,风轮的朝向与风向出现大偏差,此时风轮不正对风,风轮受到不平衡弯矩大,而通过降低叶轮转速,风轮受到的载荷将同步降低;当风轮偏航最终对风,此时偏航误差减小,风轮转速恢复到额定转速运行;其中,定义叶轮转速设定值如下:
[0134][0135]
式中,ω
set
表示叶轮转速设定值;ω
rated
表示叶轮额定转速;φ表示机舱风向仪测量的偏航误差经过低通滤波后的偏航误差角;f(φ)表示转速设定值非线性部分,为一个查表函数,根据偏航误差角查表转速设定值偏移量;abs(φ)表示偏航误差角的绝对值;φe表示偏航误差角绝对值的阈值;if表示后面的为判断条件;else表示其它情况。
[0136]
实施例3
[0137]
本实施例公开了一种存储介质,存储有程序,所述程序被处理器执行时,实现实施例1所述的风电机组在极限阵风下的降载控制方法。
[0138]
本实施例中的存储介质可以是磁盘、光盘、计算机存储器、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、u盘、移动硬盘等介质。
[0139]
实施例4
[0140]
本实施例公开了一种计算设备,包括处理器以及用于存储处理器可执行程序的存储器,所述处理器执行存储器存储的程序时,实现实施例1所述的风电机组在极限阵风下的降载控制方法。
[0141]
本实施例中所述的计算设备可以是台式电脑、笔记本电脑、智能手机、pda手持终端、平板电脑、可编程逻辑控制器(plc,programmable logic controller)、或其它具有处理器功能的终端设备。
[0142]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。