技术特征:
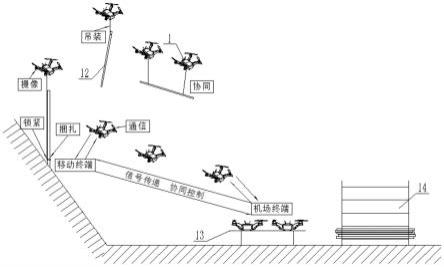
1.一种竹林无人机采伐运输方法,其特征在于:在无人机上加装gps定位装置、摄像头、吊装装置、缆绳、捆扎装置和锁紧装置;组建包括机场控制终端、无人机和采伐现场移动控制终端在内的通信网络;通过所述机场控制终端和采伐现场移动控制终端协同控制所述无人机,采伐竹子、捆扎和锁紧竹子,并将采伐的竹子从山高沟深的采伐现场运输到指定地点;在所述无人机飞行过程中,所述机场控制终端根据所述无人机上摄像头拍摄的画面,调整所述无人机的飞行姿态,保持所述无人机的平衡;根据所述无人机上的锁紧装置上安装的扭矩传感器,实时监控吊装的竹子的捆绑松紧度,进而控制所述捆扎装置进一步捆扎竹子所述采伐现场移动控制终端通过所述吊装装置控制所述缆绳的收放,根据所述吊装装置上的拉力传感器信号判断所述无人机的实时载重。2.根据权利要求1所述的竹林无人机采伐运输方法,其特征在于:在所述机场控制终端和采伐现场移动控制终端中内置电子地图,根据所述采伐现场移动控制终端的位置坐标获取待伐竹林的位置坐标,并输入本次欲采伐每棵竹子的具体坐标位置和采伐路线。3.根据权利要求2所述的竹林无人机采伐运输方法,其特征在于:在所述无人机起飞后,先由所述机场控制终端按照预置的飞行路线遥控所述无人机的飞行,直到所述无人机飞至采伐现场上空,改由所述采伐现场移动控制终端控制所述无人机;在所述无人机飞离采伐现场后,再由所述机场控制终端控制所述无人机至机场停机坪之间的飞行;在采伐现场,所述采伐现场移动控制终端遥控所述无人机采伐竹子,捆扎和锁紧竹子;当所述无人机吊起竹子后,将控制权转交给所述机场控制终端遥控所述无人机,将采伐的竹子运输至指定地点。4.根据权利要求1-3之一所述的竹林无人机采伐运输方法,其特征在于:所述机场控制终端和采伐现场移动控制终端内安装有gps定位芯片和无线通讯模块;所述无人机内还安装有无线通讯模块;所述无线通讯模块为lora通讯模块。5.根据权利要求4所述的竹林无人机采伐运输方法,其特征在于:所述机场控制终端和采伐现场移动控制终端协同控制n架无人机交替作业;当一架无人机完成竹子的捆绑、吊运返程作业时,另一架无人机紧跟采伐路线到达作业面上空,完成采伐、捆绑、吊运作业或协同控制两架无人机协同吊运一捆/一根竹林。6.一种竹林无人机采伐运输系统,其特征在于:它包括机场控制终端、n架无人机和采伐现场移动控制终端;所述机场控制终端、无人机和采伐现场移动控制终端组成一无线通信网络;所述机场控制终端遥控所述无人机,控制其从停机坪到林场上空之间的飞起;所述采伐现场移动控制终端控制所述无人机在林场上空的飞行及竹子的采伐、捆扎、锁紧、吊装作业;所述机场控制终端和采伐现场移动控制终端内安装有gps定位芯片和无线通讯模块,内置有电子地图,根据所述采伐现场移动控制终端的位置坐标获得待伐竹林的位置坐标,进而输入有本次欲采伐每棵竹子的具体位置坐标和采伐路线;所述无人机的下方固定有一安装盘,在所述安装盘的左侧/右侧安装有摄像头,在所述安装盘的右侧/左侧安装有gps定位模块和通讯模块;在所述安装盘的正下方通过法兰安装
固定有吊装装置,所述吊装装置通过缆绳悬挂捆扎装置,在所述捆扎装置上安装固定有锁紧装置;在所述吊装装置上,与所述捆扎装置之间安装有拉力传感器,在所述锁紧装置上安装有扭矩传感器;所述拉力传感器和扭矩传感器的信号输出端通过所述通讯模块将检测的数据以无线传输方式传输给所述采伐现场移动控制终端和机场控制终端;在所述无人机飞行过程中,所述机场控制终端根据所述无人机上摄像头拍摄的画面,调整所述无人机的飞行姿态,保持无人机的平衡;根据所述扭矩传感器,实时监控所述竹子的捆绑松紧度,进而控制所述捆扎装置进一步捆扎竹子;在采伐、捆绑过程中,所述采伐现场移动控制终端通过所述拉力传感器检测所述竹子的捆绑状态,控制所述缆绳的收放,通过所述扭矩传感器检测竹子捆扎状态,控制所述捆绑装置和锁紧装置动作。7.根据权利要求6所述的竹林无人机采伐运输系统,其特征在于:所述吊装装置包括绞盘机构和若干根缆绳,所述缆绳的一端盘绕在所述绞盘机构上,另一端悬挂所述捆扎装置;所述绞盘机构包括缆绳圆盘、线轴和电动机;所述电动机通过法兰固定在所述安装盘上,所述电动机的输出轴与所述线轴相连,驱动所述线轴转动;所述线轴穿过所述缆绳圆盘的轴心,与所述缆绳圆盘同轴;所述缆绳圆盘内放置有一缆绳圈,所述缆绳缠绕在所述缆绳圈内,其端部悬挂固定所述捆扎装置。8.根据权利要求7所述的竹林无人机采伐运输系统,其特征在于:所述缆绳圆盘为三层圆盘,所述每层缆绳圆盘内放置有一缆绳圈,所述每个缆绳圈内缠绕有一根所述缆绳,所述三层缆绳圆盘共用一个所述线轴,三根缆绳同步下放或提升;所述每层缆绳圆盘均有一导绳口,所述每个导绳口连通每层的所述缆绳圈,每层所述缆绳圈内缠绕一根所述缆绳,所述缆绳从所述导绳口穿出;三个所述导绳口均布在均布在所述缆绳圆盘上,三根所述缆绳等间距地悬挂所述捆扎装置,保持所述捆扎装置的平衡。9.根据权利要求7或8所述的竹林无人机采伐运输系统,其特征在于:所述捆扎装置包括定卡钳、动卡钳和捆绳;所述定卡钳和动卡钳的结构相同,均是由多节钳体通过空心的转轴铰接形成的多关节铰接结构钳体,所述定卡钳的末端和所述动卡钳通过空心的销轴上下错位铰接;在所述定卡钳的前端固定有所述锁紧装置,在所述定卡钳和动卡钳的底边上间隔地设有若干个穿绳环;所述捆绳穿过所述穿绳环,其一端缠固在所述锁紧装置上;收紧所述捆绳可带动所述动卡钳相对所述定卡钳转动,靠拢所述定卡钳形成环状,所述动卡钳和定卡钳合力捆绑竹子。10.根据权利要求9所述的竹林无人机采伐运输系统,其特征在于:所述锁紧装置9包括棘轮、棘轮转轴、外部手柄和伺服电机;所述捆绳缠固在所述棘轮转轴上;所述棘轮转轴穿过所述棘轮的轴心,固定在所述定卡钳的前端部;所述伺服电机的输出轴与所述棘轮转轴相连,驱动所述棘轮转轴旋转,锁紧所述捆绳;所述外部手柄与所述棘轮转轴螺纹连接,手动所述棘轮转轴旋转,锁紧所述捆绳。
技术总结
本发明提供一种竹林无人机采伐运输方法及系统,即在无人机上加装GPS定位装置、摄像头、吊装装置、缆绳、捆扎装置和锁紧装置;组建包括机场控制终端A、无人机B和采伐现场移动控制终端C在内的通信网络;通过机场控制终端A和采伐现场移动控制终端C协同控制无人机,采伐竹子,捆扎和锁紧竹子,并将采伐的竹子从山高沟深的采伐现场吊装、运输到指定地点。本发明的优点:1、可实现竹林机器采伐、捆绑、运输,不仅降低采伐人员的劳动强度,提高竹材采伐效率,而且,可提高山地和困难立地条件下采伐工作的安全性。2、通过控制无人机点对点运动,实现恶劣天气下作业,特别适合林地地势高耸,地形复杂,易出现大雾天气的环境。易出现大雾天气的环境。易出现大雾天气的环境。
技术研发人员:张伟 王国富 费本华 纪敏 苗虎 王晓欢 刁兴良
受保护的技术使用者:中国林业科学研究院木材工业研究所
技术研发日:2022.06.20
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。