1.本技术涉及垃圾抓斗的技术领域,尤其是涉及一种可视化垃圾抓斗。
背景技术:
2.垃圾抓斗操作人员对水分较高的垃圾进行有意识的分区域堆放,但是抓取垃圾时,却不能保证垃圾抓斗操作人员每次抓的都是干垃圾,有时也会抓到湿垃圾送入炉内。由于湿垃圾在燃烧炉的底部燃烧效率低,导致燃烧炉内的温度下降,为了提升燃烧炉内的温度,会在燃烧炉内喷油助燃。
3.为了区分抓取的垃圾的干湿类型,会在垃圾抓斗下方安装一路高清摄像头并传至控制室。每次垃圾抓斗的操作人员在抓垃圾时,观察被抓的垃圾干湿类型,从而根据不同干湿类型的垃圾注入不同量的燃油,进而既保证了燃烧炉内的垃圾燃烧质量,又降低了垃圾燃烧的成本。
4.但是摄像头的镜头在抓垃圾时,会经常被垃圾污染后遮挡视野,从而影响操作人员的观察效果。
技术实现要素:
5.为了减少摄像头被垃圾污染后遮挡视野的情况,本技术提供一种可视化垃圾抓斗。
6.本技术提供的一种可视化垃圾抓斗采用如下的技术方案:
7.一种可视化垃圾抓斗,其包括用于观察垃圾的摄像头、支撑盘、多个转动连接于支撑盘的臂爪、用于驱动臂爪的驱动件、用于清理所述摄像头的喷气机构,所述摄像头安装于所述支撑盘,所述喷气机构包括喷头,所述喷头的出气口朝向所述摄像头。
8.通过采用上述技术方案,摄像头可以确定抓斗需要抓取的位置,驱动件驱动臂爪在支撑盘上转动,并抓取垃圾。当摄像头被垃圾污染时,喷头朝摄像头喷气,从而吹散摄像头上的污渍,减少摄像头被遮挡视野的情况。
9.可选的,所述喷气机构还包括喷管和气泵,所述喷管连接于所述喷头和气泵,所述气泵安装于所述支撑盘。
10.通过采用上述技术方案,气泵生成的气体经喷管传至喷头,喷头再对摄像头喷气,气泵为喷头提供了可持续的高压气体,喷管用于连接喷头和气泵。
11.可选的,所述垃圾抓斗还包括用于保护摄像头的保护机构,所述保护机构位于靠近所述摄像头的镜头的一侧,所述保护机构连接于所述臂爪和所述支撑盘。
12.通过采用上述技术方案,在臂爪抓取垃圾时,保护机构可以保护摄像头不被垃圾污染后遮挡视野,增加了摄像头的拍摄效果。
13.可选的,所述保护机构包括挡板和连动杆,所述挡板滑动连接于所述支撑盘,所述挡板位于靠近所述摄像头的镜头的一侧,所述连动杆的一端转动连接于所述臂爪,所述连动杆的另一端转动连接于所述挡板。
14.通过采用上述技术方案,当臂爪抓取垃圾时,臂爪通过连动杆带动挡板在支撑盘上滑动,并且逐渐遮挡摄像头。当臂爪释放垃圾时,臂爪通过连动杆带动挡板在支撑盘上滑动并复位,最终暴露摄像头。
15.可选的,所述支撑盘开设有t形槽,所述挡板可以在t形槽内滑动。
16.通过采用上述技术方案,t形槽可以为挡板提供滑动空间,并且可以卡住挡板,进而增加挡板滑动时的稳定性。
17.可选的,所述垃圾抓斗还包括用于调节所述摄像头拍摄角度的调节机构,所述支撑盘开设有安装腔,所述调节机构位于安装腔内。
18.通过采用上述技术方案,安装腔为调节机构和摄像头提供安装和活动空间,进一步减少摄像头被污染的情况。调节机构作用于摄像头,控制摄像头拍摄不同区域,增加摄像头的适用性。
19.可选的,所述调节机构包括底盘、电机一、电机二,所述底盘转动连接于所述支撑盘,所述电机一安装于所述支撑盘,所述电机一的输出轴同轴连接于所述底盘,所述电机二安装于所述底盘,所述电机二的输出轴连接于所述摄像头。
20.通过采用上述技术方案,电机一可以带动底盘转动,进而带动摄像头转动,控制摄像头周向转动。电机二带动摄像头沿摄像头和底盘转动轴周向转动,从而控制摄像头另一方向转动。电机一和电机二结合,可以调节摄像头不同的拍摄角度。
21.可选的,所述臂爪设置有用于增大抓取范围的翼板。
22.通过采用上述技术方案,臂爪上的翼板可以增加臂爪抓取垃圾的范围,提高垃圾抓斗的工作效率。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.喷头喷出高压气体,可以将摄像头表面的污渍除去,减少摄像头被污渍遮挡的情况;
25.2.臂爪在抓取垃圾的同时,可以通过连动杆带动挡板对摄像头起到保护作用;
26.3.电机一和电机二可以将摄像头调节至不同的角度,增加了摄像头的拍摄范围。
附图说明
27.图1是本技术实施例的整体结构示意图;
28.图2是本技术实施例的整体结构的爆炸示意图;
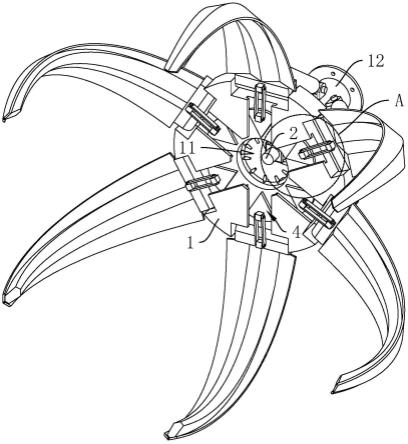
29.图3是本技术实施例的抓取机构的结构示意图;
30.图4是本技术实施例的图1的a部放大图;
31.图5是本技术实施例的喷气机构的结构示意图;
32.图6是本技术实施例的调节机构的结构示意图。
33.附图标记说明:1、支撑盘;11、安装腔;12、支撑筒;13、t形槽;2、摄像头;3、抓取机构;31、臂爪;311、第一转动部;312、翼板;32、液压缸;4、保护机构;41、挡板;411、第二转动部;42、连动杆;5、喷气机构;51、喷头;52、喷管;53、气泵;6、调节机构;61、底盘;611、耳板;62、电机一;63、电机二。
具体实施方式
34.以下结合附图1-6对本技术作进一步详细说明。
35.本技术实施例公开一种可视化垃圾抓斗,参照图1和图2,其包括支撑盘1、摄像头2、抓取机构3、保护机构4、喷气机构5和调节机构6。支撑盘1的端面开设有安装腔11,安装腔11靠近垃圾的一侧设有开口,摄像头2位于安装腔11内,且摄像头2的镜头朝向安装腔11开口方向。抓取机构3安装于支撑盘1,抓取机构3用于抓取垃圾。保护机构4连接于抓取机构3和支撑盘1,保护机构4用于保护摄像头2不被垃圾污染。喷气机构5安装于支撑盘1,喷气机构5用于清理摄像头2的镜头。调节机构6连接于支撑盘1和摄像头2,调节机构6用于调节摄像头2的拍摄角度。
36.参照图3,抓取机构3包括臂爪31和驱动件,臂爪31设置有多个,本实施例以六个为例。六个臂爪31沿支撑盘1周向间隔设置,臂爪31转动连接于支撑盘1,且臂爪31的抓取部分位于支撑盘1靠近垃圾的一侧,臂爪31两侧还设置有翼板312,翼板312与臂爪31固定连接,翼板312可以增加臂爪31的抓取范围。驱动件与臂爪31对应设置有六个,驱动件为液压缸32。支撑盘1远离臂爪31的端面设置有支撑筒12,液压缸32安装于支撑筒12并与支撑筒12转动连接,液压缸32的伸缩杆与臂爪31靠近支撑盘1的一端转动连接。
37.参照图4,保护机构4与臂爪31对应设置有六组,每组保护机构4包括挡板41和连动杆42。挡板41呈三角状,挡板41滑动连接于支撑盘1靠近臂爪31的一侧,且支撑盘1开设有供挡板41滑动的t形槽13。连动杆42位于挡板41和臂爪31之间,臂爪31靠近挡板41的一端设置有第一转动部311,挡板41远离支撑盘1的一侧设置有第二转动部411,连动杆42设置有两个,两个连动杆42分别位于第一转动部311的两侧。连动杆42的一端与第一转动部311转动连接,连动杆42的另一端与第二转动部411转动连接。当臂爪31抓取垃圾时,六个挡板41在连动杆42的带动下,相互靠近并最终完全闭合遮蔽安装腔11的开口。当臂爪31释放垃圾时,六个挡板41在连动杆42的带动下,相互远离并逐渐暴露安装腔11的开口。t形槽13可以为挡板41提供滑动限位空间的同时,还能卡住挡板41,增加挡板41滑动的稳定性。
38.参照图5,喷气组件包括喷头51、喷管52和气泵53。喷头51位于安装腔11内,喷头51的出气口朝向摄像头2方向,喷头51沿安装腔11周向间隔设置有多个。喷管52位于安装腔11内,且喷管52围绕安装腔11一周,喷管52与喷头51远离出气口的一端连通。气泵53安装于支撑盘1远离臂爪31的侧面,喷管52将气泵53与喷头51连通。启动气泵53,气泵53将气体通过喷管52送入喷头51,最后经喷头51的出气口喷出,喷头51喷出的气体对摄像头2进行清理。
39.参照图6,调节机构6包括底盘61、电机一62和电机二63。底盘61位于安装腔11内,底盘61与支撑盘1转动连接,底盘61远离支撑盘1的一侧设置有耳板611,摄像头2与耳板611转动连接。电机一62位于支撑筒12内,电机一62的输出轴穿过支撑盘1并与底盘61固定连接。电机二63位于安装腔11内,电机二63安装于耳板611,电机二63的输出轴与摄像头2固定连接。电机一62和电机二63转动可以调节摄像头2不同的拍摄角度。
40.本技术实施例的实施原理如下:
41.启动液压缸32,液压缸32的伸缩杆带动臂爪31转动,臂爪31对垃圾进行抓取。在此过程中,臂爪31通过连动杆42带动挡板41在支撑盘1上靠近摄像头2方向滑动,并且最终六个挡板41相互拼接闭合,对摄像头2起到保护效果。液压缸32的伸缩杆复位,臂爪31释放垃圾。在此过程中,臂爪31通过连动杆42带动挡板41在支撑盘1上远离原摄像头2方向滑动,最
终六个挡板41复位,摄像头2暴露。
42.启动气泵53,气泵53产生的气体经喷管52传至喷头51,并经喷头51的出气口喷出。喷头51喷出的气体对摄像头2进行清理。
43.启动电机二63,电机二63带动摄像头2朝垂直于安装腔11的开口方向旋转。启动电机一62,电机一62带动底盘61转动,底盘61带动摄像头2沿安装腔11的开口方向旋转。电机一62和电机二63可以控制摄像头2不同的拍摄角度。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。