1.本实用新型涉及一种套装机,尤其是涉及一种伸缩臂驱动油缸套装机,它主要用于伸缩臂式登高车、伸缩臂式汽车吊、伸缩臂式消防车的伸缩臂驱动油缸与伸缩臂的套装。
背景技术:
2.伸缩臂式登高车、伸缩臂式汽车吊产品广泛应用于工程建设、施工作业中,伸缩臂式消防车应用于消防领域。伸缩臂式登高车、伸缩臂式汽车吊、伸缩臂式消防车其共同特征是:在工作过程中,需要根据实际情况,进行伸缩臂的伸出与收回动作,这一动作是由套装、固定在伸缩臂内的伸缩臂驱动油缸驱动的,于是,伸缩臂驱动油缸就成为此类产品的不可或缺的构成,这也就决定了在此类产品的制造过程中,将伸缩臂驱动油缸套装在伸缩臂内,是产品装配的关键工艺过程。
3.现有的套装装配过程,主要是人工操作,通过车间行车抬吊伸缩臂驱动油缸,由行车或叉车提供套装推送力,实现伸缩臂驱动油缸与伸缩臂的套装。此种方式缺点很明显:1)没有采用机械化方式生产,也无法实现套装过程的参数化设置及控制、模式化运行、智能化组织生产;2)套装过程中伸缩臂油缸轴线与伸缩臂轴线之间的夹角须不断调整,人工操作难度大;3)操作人员多,生产效率低;4)长时间占用行车、叉车等车间公用设备;5)套装质量稳定性、一致性差;6)操作区占地面积大,操作现场混乱;7)采用行车抬吊工件进行套装,工件处于悬浮状态,不可控因素多,安全隐患多。
技术实现要素:
4.本实用新型的目的在于克服现有技术中存在的上述不足,而提供一种结构设计合理,套装动力可靠,实现套装机械化及参数化设置、控制,套装操作简单,效率高,操作安全,套装过程工件调整方便灵活的伸缩臂驱动油缸套装机。
5.本实用新型解决上述问题所采用的技术方案是:该伸缩臂驱动油缸套装机,包括套装动力车、移动支承车和多根轨道,所述套装动力车、移动支承车均活动设置在对应轨道上,其特征在于:还包括多个固定底座、多套伸缩臂对中夹紧支承台和控制系统,所述多个固定底座分别布置在套装动力车运行方向的两侧并安装固定在地面上,每个固定底座用于安装一套伸缩臂对中夹紧支承台,控制系统对伸缩臂驱动油缸套装机进行各运动单元的单独控制或联动联控;套装动力车包括车架、尾架、主动车轮、驱动单元、升降装置、从动车轮和摆转机构,该尾架、主动车轮、驱动单元、升降装置和从动车轮均安装在车架上,摆转机构安装在升降装置上。
6.作为优选,本实用新型所述主动车轮包括h型双轮缘车轮、轮轴、键、无轮缘车轮和轴承座,该h型双轮缘车轮及无轮缘车轮通过键与轮轴连接,轮轴回转安装在轴承座上,轴承座安装在车架上;驱动单元包括变频调速电机、减速器、主动链轮和从动链轮,该变频调速电机安装在减速器上,主动链轮安装在减速器上,从动链轮安装在主动车轮的轮轴上;升降装置包括升降机、台板和导向机构,该台板与升降机连接,升降装置通过升降机驱动台板
上下运动,导向机构导向;从动车轮包括h型双轮缘车轮二、无轮缘车轮二和心轴,该心轴安装在车架上,h型双轮缘车轮二、无轮缘车轮二回转安装在心轴上。
7.作为优选,本实用新型所述摆转机构包括机架、电动推杆、y型接头、连接座、直线导轨组、顶杆、顶头、摆臂、摆转轴一、摆转轴二、键一、键二和摆架组; 机架为钢结构件,电动推杆安装在机架上;直线导轨组包括导轨支座、直线导轨和滑块,导轨支座安装在机架上,直线导轨共两套,安装在导轨支座上、相互平行,滑块共两个,与对应的直线导轨配套使用;摆转轴一、摆转轴二均转动安装在机架上,键一安装在摆转轴一上,键二共两件,分别安装在摆转轴一、摆转轴二上,y型接头与电动推杆连接,连接座的底面安装在直线导轨组的滑块上,连接座的一侧与y型接头连接,另一侧与顶杆连接,顶头转动安装在顶杆上,摆臂通过键一安装在摆转轴一的一端,摆臂上开有矩形槽,顶头运动时顶在矩形槽的两侧边;摆架组包括下部钢结构、v型座、耳座和尾座, v型座共两套,沿下部钢结构的长度方向布置,并安装在下部钢结构的上平面,耳座共两套,沿下部钢结构的宽度方向相向布置,并安装在下部钢结构的上平面,且两套耳座通过两个键二分别与摆转轴一、摆转轴二连接,尾座为钢结构件,安装在下部钢结构上。
8.作为优选,本实用新型所述伸缩臂对中夹紧支承台包括基座、工件支承台、限位组和加力组,工件支承台安装在基座上,基座及工件支承台均为钢结构件;限位组包括支座一、工件压板一、导杆一和数控电缸,支座一为钢结构件,安装在基座上,数控电缸及导杆一安装在支座一上,工件压板一安装在数控电缸上并由数控电缸驱动做往复运动,由导杆一导向;加力组包括支座二、工件压板二、导杆二和气缸,支座二为钢结构件,安装在基座上,气缸及导杆二安装在支座二上,工件压板二安装在气缸上并由气缸驱动做往复运动,由导杆二导向。
9.作为优选,本实用新型所述移动支承车包括车架二、主动车轮二、从动车轮二和驱动单元二,该主动车轮二、从动车轮二和驱动单元二均安装在车架二上,车架二为钢结构件;驱动单元二包括制动电机、减速器二和链轮组二,驱动单元二通过制动电机、减速器二、链轮组二驱动主动车轮二转动。
10.作为优选,本实用新型所述摆转机构安装在套装动力车中升降装置的台板上,随台板的升降而升降。
11.作为优选,本实用新型所述主动车轮的h型双轮缘车轮与从动车轮的h型双轮缘车轮二安装在车架的同一侧,运行在同一根轨道上。
12.作为优选,本实用新型所述伸缩臂对中夹紧支承台的限位组与加力组相向布置,限位组的数控电缸及加力组的气缸的运动方向垂直于伸缩臂的纵向轴线。
13.作为优选,本实用新型所述尾架为钢结构件,该尾架包括架体与顶块,顶块安装在架体上。
14.本实用新型与现有技术相比,具有以下优点和效果:整体结构设计合理,以工业化生产方式替代简单人工操作方式,适用工位式集中生产模式,也可作为总装生产线的组成单元,可部分实现套装过程的参数化设置及控制、模式化运行、智能化组织生产,可用于伸缩臂式登高车、伸缩臂式汽车吊、伸缩臂式消防车等多种机械产品,并满足多系列、多规格的产品的伸缩臂驱动油缸与伸缩臂的套装,套装动力可靠且具有套装动力调节、限定功能,自动化程度较高,套装操作简单、效率高,套装过程的工件状态的调整方便、灵活,比之人工
操作方式,不占用行车、叉车等车间公用设备资源,且减少了套装作业区域的占地面积、并提高了操作的安全性、可靠性。
附图说明
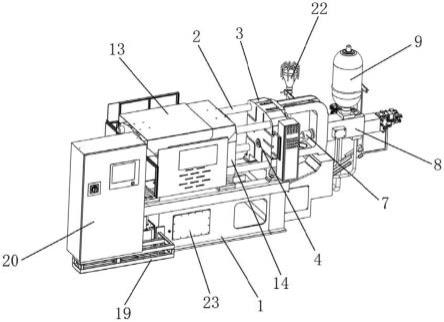
15.图1是本实用新型实施例的伸缩臂驱动油缸套装机套装初始状态结构示意图。
16.图2是本实用新型实施例的伸缩臂驱动油缸套装机完成套装后状态结构示意图。
17.图3是本实用新型实施例的伸缩臂驱动油缸套装机套装中间状态结构示意图。
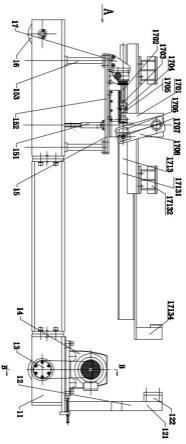
18.图4是本实用新型实施例的套装动力车主视结构示意图。
19.图5是图4中a向的结构示意图。
20.图6是图4中b-b的结构示意图。
21.图7是图1中c-c的结构示意图(实施例1)。
22.图8是图1中d-d的结构示意图(实施例1)。
23.图9是本实用新型实施例的移动支承车主视结构示意图。
24.图10是图1中c-c的结构示意图(实施例2)。
25.图11是图1中d-d的结构示意图(实施例2)。
26.图中:套装动力车1,固定底座2,伸缩臂对中夹紧支承台3,移动支承车4,轨道5,控制系统6,伸缩臂驱动油缸7(工件),伸缩臂8(工件) ;
27.套装动力车1:车架11,尾架12,主动车轮13,驱动单元14,从动车轮15,升降装置16,摆转机构17;
28.尾架12:架体121,顶块122;
29.主动车轮13:h型双轮缘车轮131,轮轴132,键133,无轮缘车轮134,轴承座135;
30.驱动单元14:变频调速电机141,减速器142,主动链轮143,从动链轮144;
31.升降装置15:升降机151,台板152,导向机构153;
32.从动车轮16:h型双轮缘车轮二161,无轮缘车轮二162,心轴163;
33.摆转机构17:机架1701,电动推杆1702,y型接头1703,连接座1704,直线导轨组1705,顶杆1706,顶头1707,摆臂1708,摆转轴一1709,摆转轴二1710,键一1711,键二1712,摆架组1713;
34.机架1701:底板17011,立板17012;
35.直线导轨组1705:导轨支座17051,直线导轨17052,滑块17053;
36.摆架组1713:下部钢结构17131,v型座17132,耳座17133,尾座17134;
37.固定底座2:左支座21,右支座22;
38.伸缩臂对中夹紧支承台3:基座31,工件支承台32,限位组33,加力组34;
39.限位组33:支座一331,工件压板一332,导杆一333,数控电缸334;
40.加力组34:支座二341,工件压板二342,导杆二343,气缸344,电动推杆345,压力传感器346;
41.移动支承车4:车架二41,主动车轮二42,从动车轮二43,驱动单元二44,销轴45;
42.驱动单元二44:制动电机441,减速器二442,链轮组二443。
具体实施方式
43.下面结合附图并通过实施例对本实用新型作进一步的详细说明,以下实施例是对本实用新型的解释而本实用新型并不局限于以下实施例。
44.实施例1。
45.参见图1至图9,本实施例伸缩臂驱动油缸套装机主要包括套装动力车1、固定底座2、伸缩臂对中夹紧支承台3、移动支承车4、轨道5和控制系统6。
46.本实施例轨道5共两根,在进行伸缩臂驱动油缸7(工件)与伸缩臂8(工件)的套装时,套装动力车1运行在轨道5上;移动支承车4也运行在轨道5上,根据伸缩臂8(工件)的长度规格确定移动支承车4所处的位置。
47.本实施例的工件上件:伸缩臂8(工件)分别支承在两套伸缩臂对中夹紧支承台3上,伸缩臂驱动油缸7(工件)支承在摆转机构17的v型座17132上,伸缩臂驱动油缸7(工件) 7的尾端靠在摆转机构17的尾座17134上。
48.参见图4至图6,本实施例套装动力车1包括车架11、尾架12、主动车轮13、驱动单元14、升降装置15、从动车轮16、摆转机构17。
49.本实施例中的车架11为钢结构件,尾架12、主动车轮13、驱动单元14、升降装置15和从动车轮16均安装在车架11上。
50.本实施例中的尾架12为钢结构件,包括架体121与顶块122,顶块122安装在架体121上。
51.本实施例中的主动车轮13包括h型双轮缘车轮131、轮轴132、键133、无轮缘车轮134和轴承座135,h型双轮缘车轮131及无轮缘车轮134通过键133与轮轴132连接,轮轴132回转安装在轴承座135上,轴承座135安装在车架11上。
52.本实施例中的驱动单元14包括变频调速电机141、减速器142、主动链轮143、从动链轮144,变频调速电机141安装在减速器142上,主动链轮143安装在减速器142上,从动链轮144安装在主动车轮13的轮轴132上,驱动单元14通过变频调速电机141、减速器142、主动链轮143、从动链轮144驱动主动车轮13的轮轴132转动,从而使h型双轮缘车轮131和无轮缘车轮134转动,变频调速电机141由变频器(图中未示)控制,套装动力车1的位置由旋转编码器(图中未示)计数、换算。
53.本实施例中的升降装置15包括升降机151、台板152和导向机构153,台板152与升降机151连接,升降装置15通过升降机151驱动台板152上下运动,导向机构153导向,升降机151的行程由旋转编码器(图中未示)计数、换算。
54.本实施例中的从动车轮16包括h型双轮缘车轮二161、无轮缘车轮二162、心轴163,心轴163安装在车架11上,h型双轮缘车轮二161、无轮缘车轮二162回转安装在心轴163上。
55.本实施例中的摆转机构17包括机架1701、电动推杆1702、y型接头1703、连接座1704、直线导轨组1705、顶杆1706、顶头1707、摆臂1708、摆转轴一1709、摆转轴二1710、键一1711、键二1712、摆架组1713;机架1701为钢结构件,包括底板17011和立板17012,立板17012竖直安装在底板17011上,电动推杆1702安装在机架1701的底板17011上,直线导轨组1705包括导轨支座17051、直线导轨17052和滑块17053,导轨支座17051安装在机架1701的底板17011上,直线导轨17052共两套,安装在导轨支座17051上且相互平行,滑块17053共两个,与对应的直线导轨17052配套使用;摆转轴一1709、摆转轴二1710均转动安装在机架
1701的立板17012上,键一1711安装在摆转轴一1709上,键二1712共两件,分别安装在摆转轴一1709、摆转轴二1710上,y型接头1703与电动推杆1702连接,连接座1704的底面安装在直线导轨组1705的滑块17053上,连接座1704的一侧与y型接头1703连接,另一侧与顶杆1706连接,顶头1707转动安装在顶杆1706上,摆臂1708通过键一1711安装在摆转轴一1709的一端,摆臂1708上开有矩形槽,顶头1707运动时顶在矩形槽的两侧边;摆架组1713包括下部钢结构17131、v型座17132、耳座17133、尾座17134, v型座17132共两套,沿下部钢结构17131的长度方向布置,并安装在下部钢结构17131的上平面,耳座17133共两套,沿下部钢结构17131的宽度方向相向布置,并安装在下部钢结构17131的上平面,且两套耳座17133通过两个键二1712分别与摆转轴一1709、摆转轴二1710连接,尾座17134为钢结构件,安装在下部钢结构上17131上。
56.参见图7,本实施例固定底座2包括左支座21和右支座22,分别布置在套装动力车1运行方向的两侧并安装固定在地面上,固定底座2用于安装一套伸缩臂对中夹紧支承台3。
57.参见图7和图8,本实施例伸缩臂对中夹紧支承台3共两套,分别安装在固定底座2和移动支承车4上,伸缩臂对中夹紧支承台3包括基座31、工件支承台32、限位组33、加力组34,工件支承台32安装在基座31上;基座31及工件支承台32均为钢结构件;限位组33包括支座一331、工件压板一332、导杆一333和数控电缸334,支座一331为钢结构件,安装在基座31上,数控电缸334及导杆一333安装在支座一331上,工件压板一332安装在数控电缸334上并由数控电缸334驱动做往复运动,由导杆一333导向;加力组34包括支座二341、工件压板二342、导杆二343和气缸344,支座二341为钢结构件,安装在基座31上,气缸344及导杆二343安装在支座二341上,工件压板二342安装在气缸344上并由气缸344驱动做往复运动,由导杆二343导向。
58.参见图9,本实施例中的移动支承车4包括车架二41、主动车轮二42、从动车轮二43、驱动单元二44、销轴45,主动车轮二42、从动车轮二43和驱动单元二44均安装在车架二41上,车架41为钢结构件;驱动单元二44包括制动电机441、减速器二442和链轮组二443,驱动单元二44通过制动电机441、减速器二442、链轮组二443驱动主动车轮二42转动,移动支承车4的位置由旋转编码器(图中未示)计数、换算,移动支承车4运行到套装位置、进行套装作业前,通过销轴45定位在地面上。
59.本实施例轨道5为标准轨道,安装固定在地面上。
60.本实施例套装动力车1的主动车轮13的h型双轮缘车轮131与从动车轮16的h型双轮缘车轮二161安装在车架11的同一侧,运行在同一根轨道5上,这根轨道5为导向轨道。
61.本实施例套装动力车1的摆转机构17通过电动推杆1702的直线运动驱动摆架组1713摆转,支承在摆转机构17的v型座17132上的伸缩臂驱动油缸7(工件)随之摆动。
62.本实施例套装动力车1的摆转机构17安装在套装动力车1的升降装置15的台板152上,随台板152的升降而升降。
63.本实施例伸缩臂对中夹紧支承台3的限位组33与加力组34相向布置,限位组33的数控电缸334及加力组34的气缸344的运动方向垂直于伸缩臂8(工件)的纵向轴线。
64.本实施例伸缩臂对中夹紧支承台3共两套,分别安装在固定底座2和移动支承车4上。
65.本实施例移动支承车4的驱动单元二44包括制动电机441、减速器二442和链轮组
二443,制动电机441安装在减速器二442上,驱动单元二44通过制动电机441、减速器二442、链轮组二443驱动主动车轮二42转动。
66.本实施例各运动单元及传感器与控制系统6电连接,控制系统6对伸缩臂驱动油缸套装机进行各运动单元的单独控制或联动联控,对套装过程进行参数化设置与控制、模式化运行。
67.本实施例套装动力车1与移动支承车4之间的安全距离由传感器检测(图中未示),控制系统6控制;
68.本实施例套装动力车1通过变频器(图中未示)调整变频调速电机141输出功率,实现套装动力的调整与限定。
69.本实施例伸缩臂驱动油缸套装机,采用plc控制;控制系统6为plc,可与mes系统对接。
70.本实施例伸缩臂驱动油缸套装机,通过固定不同规格伸缩臂8(工件)的底面高度不变,升降装置15调整伸缩臂驱动油缸7(工件)的高度,进行套装。
71.本实施例可对升降装置15的行程、套装动力车1的上件停车位置、移动支承车4的上件停车位置、套装动力、限位组的数控电缸334的到位位置等参数进行设置并按模式运行。
72.实施例2
73.参见图10至图11,实施例2只是将实施例1中的加力组34的气缸344改为电动推杆345,并在工件压板二342上加装压力传感器346;其余构成、结构与实施例1完全一样。实施例1与实施例2相比较,采用气缸344的优点是:(1)动作更柔和,在向工件施加夹紧力时,有利于工件的保护;(2)造价较低;缺点是:(1)压力调定不精准;(2)因为气体的可压缩性,使得工作稳定性相对较差;(3)需要气源。采用电动推杆345的优点是:(1)可应用于没有气源的场合;(2)动作稳定性、一致性较好;(3)日常运维比采用气动系统简单;缺点是:(1)增加了压力传感器,增加了成本;(2)动作不如气动系统柔和。
74.本实施例伸缩臂驱动油缸套装机的工作过程如下:
75.(1)工件在伸缩臂驱动油缸套装机上的定位与固定
76.a. 伸缩臂8(工件)的定位与固定
77.用车间吊装工具将伸缩臂8(工件)分别支承在两套伸缩臂对中夹紧支承台3的工件支承台32上;启动限位组33的数控电缸334,数控电缸334根据工件规格自动运行,将工件压板一332推向工件,到位后数控电缸334停止;此后的实施过程分两种情况,实施例1:启动加力组34的气缸344,气缸动作将工件压板二342推向工件,气缸的压力是调定的,这样气缸可按设定的夹紧力将工件对中并夹紧;实施例2:启动加力组34的电动推杆345,电动推杆345将工件压板二342推向工件,当压力传感器346实测的压力值达到设定值时(对于不同的产品可在控制系统6中设定不同的压力值,即设定不同的夹紧力),控制系统6停止电动推杆345的动作,这样电动推杆345可将工件对中并按设定的夹紧力夹紧工件。
78.由实施例1和实施例2的工作原理可看出,这两种方式都是按设定夹紧力的方式工作的,所以可以确保夹紧工件的力的大小是适合的。因伸缩臂8(工件)是焊接结构件,其外形尺寸公差及形位公差的数值都相对较大,如果采用设定限位组33、加力组34行程的方式进行工件的对中、夹紧,会造成未夹紧工件或夹紧力过大的情况,采用施例1和实施例2的方
式都可以有效避免未夹紧工件或夹紧力过大的问题。
79.b.伸缩臂驱动油缸7(工件)的定位、支承
80.伸缩臂驱动油缸7(工件)支承在摆转机构17的v型座17132上,因工件外形是圆形的,利用v型的对中性可使工件准确对中就位,伸缩臂驱动油缸7(工件)的尾端靠在摆转机构17的尾座17134上,这样就限定了工件在长度方向上的位置。
81.(2)伸缩臂驱动油缸套装机的定位
82.a. 移动支承车4的定位
83.对于不同长度规格的工件,工件两点支承的位置是不同的,因安装在固定底座2上的一套对中夹紧支承台3,其位置是固定不可调的,所以需要通过调整移动支承车4的位置,来改变另一套对中夹紧支承台3的位置,以适应支承夹紧不同长度规格的工件的需要;移动支承车4的位置由旋转编码器(图中未示)计数、换算,可根据不同长度规格的工件,设定移动支承车4不同的上件停车位;地面基础根据工件长度规格设有多处预埋管,移动支承车4行驶到上件位置后,将销轴45插入基础预埋管使车与地面固定。
84.b. 套装动力车1的上件位
85.套装动力车1的上件位(即:套装初始状态,见图1),套装动力车1的位置由旋转编码器(图中未示)计数、换算,可根据不同长度规格的工件,设定套装动力车1不同的上件停车位,启动套装动力车1向上件位运行,到位后套装动力车1自动停止。
86.c. 套装动力车1在垂直于工件长轴方向上的定位
87.套装动力车1同一侧的车轮均为h型双轮缘车轮,且位于轨道5的导向轨道上,从而使套装动力车1在垂直于工件长轴的方向上实现准确定位,且在套装运动过程中不会跑偏;套装动力车1另一侧的车轮均为无轮缘的车轮结构,因而避免了过定位。
88.(3)套装动力
89.a. 套装动力的来源
90.参见图1,伸缩臂驱动油缸7(工件)的尾端顶靠在摆转机构17的尾座17134上,伸缩臂驱动油缸7(工件)随套装动力车1运动且二者间无相对移动,从而将套装动力车1的行走动力转化为推动驱动油缸7(工件)进行套装动作的动力。
91.b、套装动力的调节与限制
92.本实施例的套装动力车1按最大套装阻力确定驱动功率,但对于较小规格的产品,过大的套装动力,有可能会造成工件的损坏,本实施例套装动力车1初始采用电机小功率输出,遇到阻力,采用手动递增电机输出功率的方式控制套装动力,对于不同的产品,参照该产品油缸驱动力,可设定不同的最大输出功率。本实施例的套装动力车1通过变频器控制电机输出功率。
93.(4)套装过程
94.1)先根据不同规格的工件,将套装动力车1、移动支承车4运行至对应的上件位;2)启动套装动力车1的升降装置15运行,到达设定高度,停止;3)将伸缩臂驱动油缸7(工件)支承、就位在套装动力车1上,将伸缩臂8(工件)在伸缩臂对中夹紧支承台3上就位,并对中、夹紧; 4)启动套装动力车1向伸缩臂8(工件)的方向行走,伸缩臂驱动油缸7(工件)接近伸缩臂8(工件)时,停止;5)人工检视确认工件位置准确后,启动套装动力车1向伸缩臂8(工件)的方向行走,驱动油缸7(工件)进入伸缩臂8(工件)后,根据工件结构,人工操作摆转机构
17,使驱动油缸7(工件)的轴线与伸缩臂8(工件)的轴线之间的夹角β符合套装的需要,参见图3; 6)当套装动力车1前行至摆转机构17的摆架组1713的下部钢结构17131的前端(图1中的左端)靠近伸缩臂8(工件)时,停止,此时驱动油缸7(工件)已支承在伸缩臂8(工件)中;启动套装动力车1的升降装置15下降至下限位;7)升降装置15下降至下限位后,启动套装动力车1继续向伸缩臂8(工件)的方向行走,当套装动力车1的尾架12的顶块122与驱动油缸7(工件)的尾端接触后,由顶块122将套装动力车1的行走动力转化为推动驱动油缸7(工件)继续套装动作的动力,直至驱动油缸7(工件)套装到位,参见图2。
95.(5)伸缩臂驱动油缸套装机的参数化设置及控制、模式化运行
96.a. 参数化设置
97.本实施例伸缩臂驱动油缸套装机可在控制系统6中对下列参数进行参数化设置及控制:1)对于不同产品,设定不同的升降装置15的行程;2)对于不同产品,设定不同的套装动力车1的上件位停车位置;3)对于不同产品,设定不同的移动支承车4的上件位停车位置;4)对于不同产品,设定限位组33的数控电缸334的到位位置;5)对于不同产品,设定不同的套装动力车1套装初始功率、功率递增幅度以及最大功率。6)在实施例2中,对于不同产品,设定不同的夹紧力。
98.b. 模式化运行
99.完成前述参数化设置后,当操作人员在控制系统6中选定产品代号后,就选定了相应的运行参数,启动运行后,本实施例伸缩臂驱动油缸套装机将按设参数定运行。
100.通过上述阐述,本领域的技术人员已能实施。
101.此外,需要说明的是,本说明书中所描述的具体实施例,其零、部件的形状、所取名称等可以不同,本说明书中所描述的以上内容仅仅是对本实用新型结构所作的举例说明。凡依据本实用新型专利构思所述的构造、特征及原理所做的等效变化或者简单变化,均包括于本实用新型专利的保护范围内。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。