1.本发明涉及在通过搬送机构搬送平板状的载物台的搬送装置中推定载物台的偏转角度的技术。
背景技术:
2.以往,已知一边搬送平板状的载物台一边对由载物台保持的基板进行各种处理的装置。例如,专利文献1中记载了一种装置,其一边通过载物台移动机构(20)使载置了基板(w)的载物台(10)移动一边在基板(w)的上表面描绘曝光图案。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2016-72434号公报。
技术实现要素:
6.发明要解决的问题
7.搭载于这种装置的载物台的搬送装置有时具有一对直行机构。具体而言,已知通过互相平行地设置的一对线性马达来沿规定的方向搬送载物台的机构。
8.在该搬送装置中,为了使载物台以一定的姿势移动,需要使一对直行机构均等地动作。然而,有时一对直行机构的微小的驱动误差、线性马达的引导件的空隙内的气压变动、加工误差等会导致载物台绕铅垂轴的旋转角度(所谓的“偏转角度”)轻微地变动。当产生这种偏转角度的变动时,难以对由载物台保持的基板进行精密的处理。
9.在以往的搬送装置中搭载了大规模的测量装置,以把握上述偏转角度的变动。而且,基于测量装置的测量结果,修正搬送装置的动作。然而,如果搭载大规模的测量装置,则难以进行搬送装置的小型化。另外,通过搭载测量装置,搬送装置的制造成本也上升。
10.为了在不始终设置这种大规模的测量装置的情况下就把握载物台的偏转角度,例如,考虑利用机器学习。具体而言,考虑准备学习了由搬送装置输出的扭矩值等测量值与载物台的偏转角度的关系的学习完毕模型,向该学习完毕模型输入测量值,以输出载物台的偏转角度。
11.然而,存在多种用于生成学习完毕模型的机器学习算法。另外,多个机器学习算法分别存在缺点和长处,根据搬送装置的动作状况,各机器学习算法的推定精度发生变动。因此,如果仅依赖于由一个机器学习算法生成的一个学习完毕模型,则根据搬送装置的动作状况,有时不能进行高精度的推定。
12.本发明是鉴于这种情况而提出的,其目的在于,提供一种在不始终设置这种大规模的测量装置的情况下就能够推定载物台的偏转角度,并且在搬送装置的多种动作状况下能够实现高推定精度的技术。
13.用于解决问题的手段
14.为了解决上述课题,本技术的第一发明是在通过搬送机构搬送平板状的载物台的
搬送装置中推定所述载物台的偏转角度的载物台姿势推定装置,其具有:输入数据获取部,获取由所述搬送机构输出的测量值或基于所述测量值算出的值作为输入数据;以及姿势推定部,基于所述输入数据来推定所述载物台的偏转角度,并输出推定结果,所述姿势推定部具有:多个学习完毕模型,基于所述输入数据来输出所述载物台的偏转角度的临时推定值;以及推定值确定部,基于由所述多个学习完毕模型输出的多个所述临时推定值来确定所述推定结果。
15.本技术的第二发明是如第一发明所述的载物台姿势推定装置,其中,所述多个学习完毕模型由彼此不同的算法生成。
16.本技术的第三发明是如第一发明或第二发明所述的载物台姿势推定装置,其中,所述推定值确定部将所述多个临时推定值的平均值作为所述推定结果。
17.本技术的第四发明是如第一发明或第二发明所述的载物台姿势推定装置,其中,在所述多个学习完毕模型中设定有加权比率,所述推定值确定部将使用了所述加权比率的所述多个临时推定值的加权平均值作为所述推定结果。
18.本技术的第五发明是如第四发明所述的载物台姿势推定装置,其中,所述推定值确定部基于表示所述搬送机构的动作状态的状态变量来改变所述加权比率。
19.本技术的第六发明是如第一发明或第二发明所述的载物台姿势推定装置,其中,所述推定值确定部基于表示所述搬送机构的动作状态的状态变量来选择所述多个临时推定值中的某一个,并将所选择的所述临时推定值作为所述推定结果。
20.本技术的第七发明是如第一发明至第六发明中任一项所述的载物台姿势推定装置,其中,所述搬送机构通过一对直行机构搬送所述载物台,所述输入数据获取部基于所述一对直行机构的扭矩值的差值来生成所述输入数据。
21.本技术的第八发明是一种搬送装置,具有第一发明至第七发明中任一项所述的载物台姿势推定装置;所述载物台;以及所述搬送机构。
22.本技术的第九发明是在通过搬送机构搬送平板状载物台的搬送装置中推定所述载物台的偏转角度的载物台姿势推定方法,包括:工序a),获取由所述搬送机构输出的测量值或基于所述测量值算出的值作为输入数据;以及工序b),基于所述输入数据来推定所述载物台的偏转角度,并输出推定结果,在所述工序b)中,在多个学习完毕模型中输入所述输入数据,基于由所述多个学习完毕模型输出的多个临时推定值来确定所述推定结果。
23.发明的效果
24.根据本技术的第一发明至第九发明,基于由搬送机构输出的测量值或基于测量值算出的值来推定载物台的偏转角度。由此,在不始终设置大规模的测量装置的情况下能够推定载物台的偏转角度。另外,基于由多个学习完毕模型输出的多个临时推定值输出一个推定结果。由此,在搬送装置的多种动作状况下能够实现高推定精度。
附图说明
25.图1是具有搬送装置的描绘装置的立体图。
26.图2是具有搬送装置的描绘装置的概略俯视图。
27.图3是表示控制部与描绘装置内的各部的电连接的框图。
28.图4是以与主扫描方向垂直的面切断搬送装置的一部分时的局部剖视图。
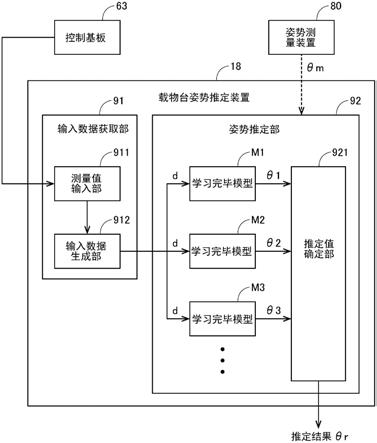
29.图5是表示载物台姿势推定装置的结构的框图。
30.图6是表示事先学习处理的流程的流程图。
31.图7是表示载物台姿势推定装置的推定处理的流程的流程图。
32.图8是表示推定值确定部的推定结果的确定方法的第二例的流程图。
33.图9是表示推定值确定部的推定结果的确定方法的第三例的流程图。
34.图10是表示推定值确定部的推定结果的确定方法的第四例的流程图。
具体实施方式
35.下面,参照附图说明本发明的实施方式。
36.需要说明的是,以下,将水平方向中的通过一对直行机构使载物台移动的方向设为“主扫描方向”,将与主扫描方向正交的方向设为“副扫描方向”。
37.<1.描绘装置的结构>
38.图1是具有本发明的一实施方式的搬送装置10的描绘装置1的立体图。图2是描绘装置1的概略俯视图。该描绘装置1是对涂布有感光材料的半导体基板或玻璃基板等基板w的上表面照射空间调制后的光,从而在基板w的上表面描绘曝光图案的装置。如图1和图2所示,描绘装置1具有搬送装置10、框架20、描绘处理部30以及控制部40。
39.搬送装置10是在基台11的上表面上以大致规定的姿势沿水平方向搬送平板状的载物台12的装置。搬送装置10具有包括主扫描机构13以及副扫描机构14的搬送机构。主扫描机构13是用于沿主扫描方向搬送载物台12的机构。副扫描机构14是沿副扫描方向搬送载物台12的机构。基板w以水平姿势保持在载物台12的上表面,与载物台12一同沿主扫描方向和副扫描方向移动。
40.搬送装置10的更详细的结构在下面说明。
41.框架20是用于在基台11的上方保持描绘处理部30的结构。框架20具有一对支柱部21以及架桥部22。一对支柱部21在副扫描方向上隔开间隔而立设。各支柱部21从基台11的上表面向上方延伸。架桥部22在2根支柱部21的上端部之间沿副扫描方向延伸。保持基板w的载物台12能够通过一对支柱部21之间以及架桥部22的下方。
42.描绘处理部30具有两个光学头31、照明光学系统32、激光振荡器33以及激光驱动部34。两个光学头31以在副扫描方向上隔开间隔的方式被固定在架桥部22。照明光学系统32、激光振荡器33以及激光驱动部34例如收纳在架桥部22的内部空间。激光驱动部34与激光振荡器33电连接。当使激光驱动部34动作时,从激光振荡器33射出脉冲光。而且,从激光振荡器33射出的脉冲光通过照明光学系统32被导入光学头31。
43.在光学头31的内部设有包括空间调制器的光学系统。作为空间调制器,例如,使用作为衍射光栅型的空间光调制器的glv(grating light valve,光栅光阀)(注册商标)。导入到光学头31的脉冲光由空间调制器调制成规定的图案,照射到基板w的上表面。由此,涂布在基板w的上表面的抗蚀剂等感光材料被曝光。
44.在描绘装置1运转时,反复执行光学头31的曝光和搬送装置10对基板w的搬送。具体而言,一边通过副扫描机构14沿副扫描方向搬送载物台12,一边进行来自光学头31的脉冲光的照射,从而对沿副扫描方向延伸的带状区域(条带(swath))进行曝光后,通过主扫描机构13沿主扫描方向以一个条带的量搬送载物台12。描绘装置1通过反复进行这种副扫描
方向的曝光和主扫描方向的载物台12的搬送,从而在基板w的整个上表面上描绘图案。
45.控制部40是用于对描绘装置1的各部进行动作控制的机构。图3是表示控制部40与描绘装置1内的各部的电连接的框图。如图3中示意性所示,控制部40由具有cpu等处理器41、ram等存储器42以及硬盘驱动器等存储部43的计算机构成。在存储部43中存储有用于对描绘装置1进行动作控制的计算机程序p。
46.另外,如图3所示,控制部40与描绘处理部30(包括上述光学头31以及激光驱动部34)、主扫描机构13(包括后述的线性马达61以及空气引导件62)、副扫描机构14(包括后述的线性马达71)、后述的旋转机构15以及各种传感器50电连接。控制部40将储存在存储部43中的计算机程序p以及数据d读取至存储器42,处理器41基于该计算机程序p以及数据d进行运算处理,从而对描绘装置1内的上述各部进行动作控制。由此,进行描绘装置1中的描绘处理。
47.<2.搬送装置的结构>
48.下面,说明搬送装置10的详细结构。图4是以与主扫描方向垂直的面切断搬送装置的一部分时的局部剖视图。如图1~图4所示,搬送装置10具有基台11、载物台12、主扫描机构13、副扫描机构14、旋转机构15、下层支撑板16、中层支撑板17以及载物台姿势推定装置18。
49.基台11是支撑搬送装置10的各部的支撑台。基台11具有沿主扫描方向和副扫描方向扩展的平板状的外形。在基台11的下表面设有四个脚部111和两个阻尼器112。脚部111和阻尼器112的长度能够分别单独调节。因此,通过调节脚部111和阻尼器112的长度,从而能够将基台11的姿势调整为水平。
50.下层支撑板16、中层支撑板17以及载物台12分别具有平板状的外形。下层支撑板16在基台11上被支撑为能够通过主扫描机构13沿主扫描方向移动。中层支撑板17在下层支撑板16上被支撑为能够通过副扫描机构14沿副扫描方向移动。载物台12在中层支撑板17上被支撑为能够通过旋转机构15绕铅垂轴旋转。载物台12具有能够载置基板w的上表面。另外,在载物台12的上表面设有用于保持基板w的卡盘销或吸附基板w的多个吸附孔。
51.主扫描机构13是使下层支撑板16相对于基台11沿主扫描方向移动的机构。主扫描机构13具有一对直行机构60。一对直行机构60设置在基台11的上表面的副扫描方向的两端部。如图2和图4所示,一对直行机构60分别具有线性马达61以及空气引导件62。
52.线性马达61具有定子611以及动子612。定子611沿主扫描方向铺设在基台11的上表面。即,一对定子611互相平行地配置。动子612通过后述的空气轴承622被固定于下层支撑板16上。
53.另外,主扫描机构13具有用于控制线性马达61的动作的控制基板63。作为控制基板63,例如使用servopack(注册商标)。控制基板63与控制部40电连接。在驱动线性马达61时,按照来自控制部40的指令,控制基板63算出在线性马达61中应产生的扭矩。而且,将与算出的扭矩对应的驱动信号向各线性马达61的定子611供给。这样一来,利用在定子611与动子612之间产生的磁性的吸引力和反作用力,动子612沿定子611在主扫描方向上移动。
54.空气引导件62具有导轨621以及空气轴承622。导轨621沿主扫描方向铺设在基台11的上表面。即,线性马达61的定子611与空气引导件62的导轨621互相平行地配置。空气轴承622被固定于下层支撑板16和动子612。另外,空气轴承622配置在导轨621的上方。
55.如图4所示,在空气轴承622的下表面设有气体吹出口623。在搬送装置10运转时,始终从工场的设备向空气轴承622供给气体,从气体吹出口623向导轨621的上表面吹出加压的气体。由此,空气轴承622以非接触方式浮起支撑在导轨621上。因此,在使线性马达61驱动时,下层支撑板16在被空气引导件62浮起支撑的状态下沿主扫描方向以低摩擦方式平滑地移动。
56.副扫描机构14是使中层支撑板17相对于下层支撑板16沿副扫描方向移动的机构。副扫描机构14具有线性马达71以及一对引导机构72。
57.线性马达71设置在下层支撑板16的上表面的主扫描方向的大致中央。线性马达71具有定子711以及动子712。定子711沿副扫描方向铺设在下层支撑板16的上表面。动子712固定于中层支撑板17。在驱动线性马达71时,利用在定子711与动子712之间产生的磁性的吸引力和反作用力,动子712沿定子711在副扫描方向上移动。
58.一对引导机构72设置在下层支撑板16的上表面的主扫描方向的两端部。一对引导机构72分别具有导轨721以及滚珠轴承722。导轨721沿副扫描方向铺设在下层支撑板16的上表面。滚珠轴承722被固定在中层支撑板17的下表面。另外,滚珠轴承722能够沿导轨721在副扫描方向上移动。因此,在使线性马达71驱动时,中层支撑板17相对于下层支撑板16沿副扫描方向移动。
59.旋转机构15是调整载物台12相对于中层支撑板17的绕铅垂轴的角度的机构。作为旋转机构15,例如使用马达。在使马达动作时,载物台12相对于中层支撑板17绕铅垂轴旋转。由此,能够调整载物台12的绕铅垂轴的角度(偏转角度)θ。
60.如此地,载物台12通过主扫描机构13、副扫描机构14以及旋转机构15能够相对于基台11沿主扫描方向和副扫描方向移动,而且能够调整偏转角度θ。
61.如图1和图2所示,在该搬送装置10中能够设置姿势测量装置80。姿势测量装置80是用于测量载物台12的偏转角度θ的装置。姿势测量装置80具有固定于载物台12的反射镜81以及激光干涉仪82。反射镜81被固定于载物台12的主扫描方向的端缘部。激光干涉仪82被固定于基台11的上表面。激光干涉仪82向反射镜81照射两条激光。而且,基于从反射镜81反射的两条激光的干渉来检测两条激光的光路差。接着,基于该光路差测量载物台12的偏转角度θ。
62.在进行后述的事先学习处理的情况下设置姿势测量装置80。在事先学习完成后,能够拆下姿势测量装置80来使用搬送装置10。
63.<3.关于载物台姿势推定装置>
64.<3-1.载物台姿势推定装置的结构>
65.接着,说明搭载于搬送装置10的载物台姿势推定装置18。图5是表示载物台姿势推定装置18的结构的框图。载物台姿势推定装置18是基于从主扫描机构13输出的测量值来推定载物台12的偏转角度θ的装置。如图5所示,载物台姿势推定装置18具有输入数据获取部91以及姿势推定部92。输入数据获取部91具有测量值输入部911以及输入数据生成部912。姿势推定部92具有多个学习完毕模型m1、m2、m3
……
以及推定值确定部921。
66.载物台姿势推定装置18由具有cpu等处理器、ram等存储器以及硬盘驱动器等存储部的计算机构成。测量值输入部911、输入数据生成部912以及推定值确定部921的各功能通过处理器按照存储在存储部中的计算机程序进行动作来实现。
67.学习完毕模型m1、m2、m3
……
是通过使用了机器学习算法的事先学习而调整了参数的推理程序。作为用于获得学习完毕模型m1、m2、m3
……
的机器学习算法,例如,使用包括单层神经网络、深度学习等的神经网络、包括随机森林、梯度推进等的决策树系算法、支持向量机这样的所谓的监督式机器学习算法。多个学习完毕模型m1、m2、m3
……
分别由不同的机器学习算法生成。
68.需要说明的是,载物台姿势推定装置18可以与上述控制部40由同一计算机构成,也可以与控制部40由不同的计算机构成。
69.<3-2.载物台姿势推定装置的事先学习>
70.接着,对载物台姿势推定装置18中预先执行的事先学习处理进行说明。图6是表示事先学习处理的流程的流程图。
71.进行事先学习处理时,在搬送装置10中设置上述姿势测量装置80(步骤s11)。而且,一边使主扫描机构13动作一边反复执行以下步骤s12~s15。
72.首先,在测量值输入部911中输入由控制基板63输出的测量值(步骤s12)。测量值例如为主扫描机构13的一对线性马达61的扭矩值。但是,向测量值输入部911输入的测量值也可以为通过各种传感器50测量空气轴承622的气压、导轨621的温度、搬送装置10的驱动音、载物台12的振动、载物台12的位置等其他项目而得到的值。
73.然后,输入数据生成部912基于输入到测量值输入部911的测量值生成输入数据d(步骤s13)。例如,在测量值为一对线性马达61的扭矩值的情况下,输入数据生成部912算出这些扭矩值的差值。而且,从算出的差值的时间序列数据中除去不需要的频率,从而生成输入数据d。在输入到测量值输入部911的测量值为扭矩值以外的情况下,输入数据生成部912也进行规定的运算和滤波处理,从而生成适于机器学习的输入数据d。
74.此外,输入数据生成部912也可以将输入到测量值输入部911的测量值本身作为输入数据d。即,输入数据生成部912只要将由搬送机构输出的测量值或对测量值进行规定的运算和滤波处理而算出的值设为输入数据d即可。
75.接着,姿势推定部92将由输入数据生成部912生成的输入数据d作为输入,将姿势测量装置80的测量结果θm设为训练数据集进行机器学习(步骤s14)。即,姿势推定部92通过上述机器学习算法来学习输入数据d与姿势测量装置80的测量结果θm的关系。本实施方式的姿势推定部92通过多个不同的机器学习算法并行地进行该步骤s14的机器学习。因此,通过步骤s14的机器学习生成多个不同的学习完毕模型m1、m2、m3
……
。
76.姿势推定部92将通过步骤s14的机器学习生成的学习完毕模型m1、m2、m3
……
的输出值与作为训练数据集的测量结果θm进行比较。而且,在学习完毕模型m1、m2、m3
……
的输出值与测量结果θm的差值不是预设的阈值以下的情况下,姿势推定部92判断为学习完毕模型m1、m2、m3
……
的推定精度未达到所期望的水平(步骤s15:否)。在该情况下,载物台姿势推定装置18反复进行上述步骤s12~s14的处理。如此地,通过反复进行机器学习,学习完毕模型m1、m2、m3
……
的推定精度逐渐地提高。
77.最终,当学习完毕模型m1、m2、m3
……
的输出值与测量结果θm的差值为预设的阈值以下时,姿势推定部92判断为各学习完毕模型m1、m2、m3
……
的推定精度达到所期望的水平。在该情况下,姿势推定部92结束机器学习(步骤s15:是)。而且,从搬送装置10拆下姿势测量装置80(步骤s16)。需要说明的是,当步骤s12~s14的重复次数达到预设的上限值时,
载物台姿势推定装置18在步骤s15中可以结束机器学习。
78.<3-3.载物台姿势推定装置的推定处理>
79.接着,说明基于载物台姿势推定装置18的偏转角度θ的推定处理。在上述事先学习处理完成后,在使搬送装置10动作时执行该推定处理。图7是表示推定处理的流程的流程图。
80.在进行推定处理时,首先,向测量值输入部911输入由控制基板63输出的测量值(步骤s21)。此处,输入与上述步骤s12相同种类的测量值。例如,在步骤s12中输入的测量值为一对线性马达61的扭矩值的情况下,步骤s21中输入的测量值也为一对线性马达61的扭矩值。
81.然后,输入数据生成部912基于输入到测量值输入部911的测量值生成输入数据d(步骤s22)。此处,执行与上述步骤s13相同的处理。即,在步骤s13中执行的处理为差值的算出以及滤波处理的情况下,在步骤s22中也执行差值的算出以及滤波处理,从而生成输入数据d。
82.接着,姿势推定部92分别将生成的输入数据d输入到多个学习完毕模型m1、m2、m3
……
(步骤s23)。这样一来,各学习完毕模型m1、m2、m3
……
输出与输入数据d对应的载物台12的偏转角度θ的临时推定值θ1、θ2、θ3
……
。由此,针对一个输入数据d,得到多个临时推定值θ1、θ2、θ3
……
(步骤s24)。
83.接着,姿势推定部92的推定值确定部921基于多个临时推定值θ1、θ2、θ3
……
确定一个推定结果θr(步骤s25)。具体而言,例如,推定值确定部921算出多个临时推定值θ1、θ2、θ3
……
的平均值,确定算出的平均值作为推定结果θr。但是,推定值确定部921也可以通过其他的方法确定推定结果θr。
84.图8是表示推定值确定部921的推定结果的确定方法的第二例的流程图。在图8的例子中,对学习完毕模型m1、m2、m3
……
分别预先设定加权比率w1、w2、w3
……
。加权比率w1、w2、w3
……
预先存储到构成载物台姿势推定装置18的计算机的存储部。首先,推定值确定部921从存储部中读取加权比率w1、w2、w3
……
(步骤s31)。然后,推定值确定部921使用读取的加权比率w1、w2、w3
……
算出多个临时推定值θ1、θ2、θ3
……
的加权平均值,将算出的加权平均值设为推定结果θr(步骤s32)。
85.例如,当使用三个学习完毕模型m1、m2、m3时,在步骤s32中,使用了加权平均的推定结果θr能够通过下式(1)算出。
86.θr=(w1
·
θ1 w2
·
θ2 w3
·
θ3)/(w1 w2 w3) (1)
87.在多个学习完毕模型m1、m2、m3
……
中,当存在推定精度特别高的学习完毕模型或应重视的学习完毕模型时,优选将该学习完毕模型的加权比率设定得相对高。这样,通过如上所述算出加权平均值,能够得到更优选的推定结果θr。
88.图9是表示推定值确定部921的推定结果的确定方法的第三例的流程图。在图9的例子中,分别与学习完毕模型m1、m2、m3
……
对应的加权比率w1、w2、w3
……
并不是固定值,根据主扫描机构13的动作状态而变化。推定值确定部921首先获取表示主扫描机构13的动作状态的状态变量(步骤s41)。状态变量可以为输入到上述测量值输入部911的测量值,也可以为由其他传感器获取的变量,或者,也可以为用户对控制部40设定的动作模式等。
89.推定值确定部921基于获取的状态变量改变加权比率w1、w2、w3
……
(步骤s42)。由
此,根据主扫描机构13的动作状态提高能够发挥高推定精度的学习完毕模型的加权比率。例如,在由某个状态变量表示的动作状态下,在多个学习完毕模型m1、m2、m3
……
中的学习完毕模型m2的推定精度特别高的情况下,推定值确定部921改变多个加权比率w1、w2、w3
……
,以使加权比率w2的值相对高。
90.然后,推定值确定部921使用改变后的加权比率w1、w2、w3
……
算出多个临时推定值θ1、θ2、θ3
……
的加权平均值,将算出的加权平均值作为推定结果θr(步骤s43)。
91.如此地,如果根据动作状态改变加权比率w1、w2、w3
……
,则能够针对每个动作状态改变重视的学习完毕模型。因此,能够针对每个动作状态提高能够发挥高推定精度的学习完毕模型的加权比率,能够得到更高精度的推定结果θr。
92.图10是表示推定值确定部921的推定结果的确定方法的第四例的流程图。在图10的例子中,推定值确定部921首先获取表示主扫描机构13的动作状态的状态变量(步骤s51)。状态变量可以为输入到上述测量值输入部911的测量值,也可以为由其他传感器获取的变量,或者也可以为用户对控制部40设定的动作模式等。
93.推定值确定部921基于获取的状态变量选择多个临时推定值θ1、θ2、θ3
……
中的某一个,将选择的临时推定值作为推定结果θr(步骤s52)。例如,在由某个状态变量表示的动作状态下,在多个学习完毕模型m1、m2、m3
……
中的学习完毕模型m2的推定精度特别高的情况下,推定值确定部921将由该学习完毕模型m2输出的临时推定值θ2作为推定结果θr。
94.即,在该例中,根据动作状态,采用由多个学习完毕模型m1、m2、m3
……
输出的多个临时推定值θ1、θ2、θ3
……
中的某一个。如此一来,针对每个动作状态选择能够发挥高推定精度的学习完毕模型,从而得到高精度的推定结果θr。
95.返回至图7。当确定了偏转角度θ的推定结果θr时,推定值确定部921将该推定结果θr输出至控制部40(步骤s26)。接着,控制部40基于由姿势推定部92输出的偏转角度θ的推定结果θr修正载物台12的偏转角度θ(步骤s27)。具体而言,控制部40使旋转机构15动作、或者调整一对线性马达61中的某一个的扭矩值。由此,载物台12的偏转角度θ被修正为接近所期望的值。
96.如上所述,在该搬送装置10中,基于输入数据d推定载物台12的偏转角度θ,该输入数据d为由主扫描机构13输出的测量值或基于测量值算出的值。由此,能够在不始终设置大规模的姿势测量装置80的情况下推定载物台12的偏转角度θ。
97.另外,在该搬送装置10中,基于由多个学习完毕模型m1、m2、m3
……
输出的多个临时推定值θ1、θ2、θ3
……
输出一个推定结果θr。因此,在搬送装置10的多种动作状况下能够实现高推定精度。另外,在本实施方式中,多个学习完毕模型m1、m2、m3
……
分别由不同的机器学习算法生成。因此,在某个机器学习算法难以发挥高推定精度的动作状况下,其他机器学习算法能够对其进行补充。由此,在更多的动作状况下,能够高精度地推定载物台12的偏转角度θ。
98.<4.变形例>
99.以上说明了本发明的一实施方式,但本发明并不限于上述实施方式。
100.在上述实施方式中,测量值输入部911从控制基板63获取线性马达61的扭矩值。然而,测量值输入部911也可以通过其他的方法获取线性马达61的扭矩值。例如,也可以在直行机构60的各线性马达61上安装扭矩传感器并从该扭矩传感器中获取扭矩值。
101.另外,在上述实施方式中,向全部学习完毕模型m1、m2、m3
……
输入相同的输入数据d。然而,输入数据生成部912也可以对输入到测量值输入部911的测量值,针对每个学习完毕模型实施不同的处理。而且,也可以向多个学习完毕模型m1、m2、m3
……
输入由不同的处理生成的不同的输入数据。如此一来,能够向各学习完毕模型输入更适当的输入数据。
102.另外,上述实施方式的搬送装置10不仅具有主扫描机构13,而且也具有副扫描机构14以及旋转机构15。然而,本发明也可以以不具有副扫描机构14以及旋转机构15的搬送装置作为对象。
103.另外,上述实施方式的搬送装置10搭载于描绘装置1。然而,本发明也可以以搭载于除描绘装置1以外的装置的搬送装置作为对象。例如,搬送装置也可以搭载于对保持在载物台上的基板涂布处理液的装置。另外,搬送装置也可以搭载于对保持在载物台上的记录介质进行印刷的装置。
104.另外,在上述实施方式中,在事先学习处理中,通过激光干涉仪82实测载物台12的偏转角度θ。然而,载物台12的偏转角度θ也可以通过其他方法来实测。例如,也可以基于由相机获取的载物台12的图像实测载物台12的偏转角度θ。
105.另外,上述实施方式的直行机构60具有线性马达61。然而,也可以使用通过滚珠螺杆将由旋转马达输出的旋转运动转换为直行运动的机构来代替线性马达61。
106.另外,在不产生矛盾的范围内,可以将上述实施方式和变形例中出现的各要素适当地组合。
107.附图标记说明
108.1:描绘装置
109.10:搬送装置
110.11:基台
111.12:载物台
112.13:主扫描机构
113.14:副扫描机构
114.15:旋转机构
115.16:下层支撑板
116.17:中层支撑板
117.18:载物台姿势推定装置
118.20:框架
119.30:描绘处理部
120.40:控制部
121.50:传感器
122.60:直行机构
123.61:线性马达
124.62:空气引导件
125.63:控制基板
126.80:姿势测量装置
127.91:输入数据获取部
128.92:姿势推定部
129.911:测量值输入部
130.912:输入数据生成部
131.921:推定值确定部
132.m1、m2、m3:学习完毕模型
133.w:基板
134.d:输入数据
135.θ:偏转角度
136.θ1、θ2、θ3:临时推定值
137.θr:推定结果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。