技术特征:
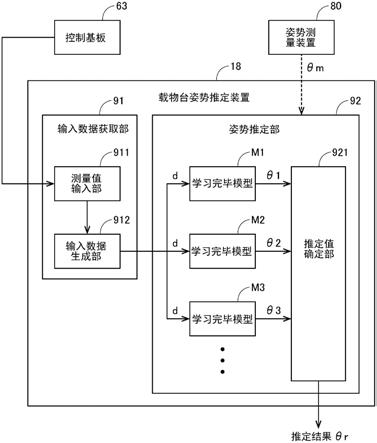
1.一种载物台姿势推定装置,在通过搬送机构搬送平板状的载物台的搬送装置中推定所述载物台的偏转角度,其中,具有:输入数据获取部,获取由所述搬送机构输出的测量值或基于所述测量值算出的值作为输入数据;以及姿势推定部,基于所述输入数据来推定所述载物台的偏转角度,并输出推定结果,所述姿势推定部具有:多个学习完毕模型,基于所述输入数据来输出所述载物台的偏转角度的临时推定值;以及推定值确定部,基于由所述多个学习完毕模型输出的多个所述临时推定值来确定所述推定结果。2.如权利要求1所述的载物台姿势推定装置,其中,所述多个学习完毕模型由彼此不同的算法生成。3.如权利要求1或2所述的载物台姿势推定装置,其中,所述推定值确定部将多个所述临时推定值的平均值作为所述推定结果。4.如权利要求1或2所述的载物台姿势推定装置,其中,在所述多个学习完毕模型中设定有加权比率,所述推定值确定部将使用了所述加权比率的多个所述临时推定值的加权平均值作为所述推定结果。5.如权利要求4所述的载物台姿势推定装置,其中,所述推定值确定部基于表示所述搬送机构的动作状态的状态变量来改变所述加权比率。6.如权利要求1或2所述的载物台姿势推定装置,其中,所述推定值确定部基于表示所述搬送机构的动作状态的状态变量来选择多个所述临时推定值中的某一个,并将所选择的所述临时推定值作为所述推定结果。7.如权利要求1~6中任一项所述的载物台姿势推定装置,其中,所述搬送机构通过一对直行机构搬送所述载物台,所述输入数据获取部基于所述一对直行机构的扭矩值的差值来生成所述输入数据。8.一种搬送装置,其中,具有:权利要求1~7中任一项所述的载物台姿势推定装置;所述载物台;以及所述搬送机构。9.一种载物台姿势推定方法,在通过搬送机构搬送平板状的载物台的搬送装置中推定所述载物台的偏转角度,其中,包括:工序a),获取由所述搬送机构输出的测量值或基于所述测量值算出的值作为输入数据;以及工序b),基于所述输入数据来推定所述载物台的偏转角度,并输出推定结果,在所述工序b)中,在多个学习完毕模型中输入所述输入数据,基于由所述多个学习完毕模型输出的多个临时推定值来确定所述推定结果。
技术总结
该载物台姿势推定装置(18)具有:输入数据获取部(91)以及基于输入数据推定载物台的偏转角度的姿势推定部(92)。由此,在不始终设置大规模的测量装置的情况下能够推定载物台的偏转角度。另外,姿势推定部92基于由多个学习完毕模型(M1、M2、M3
技术研发人员:臼本宏昭
受保护的技术使用者:株式会社斯库林集团
技术研发日:2021.01.13
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。