1.本实用新型涉及一种具有自动锁螺丝功能的门把手打磨夹具,主要用于工业机器人对压铸产品打磨抛光和抛光的重复定位与夹持装置领域。
背景技术:
2.门把手在加工后需要对其进行打磨处理,以保证其产品质量,现有技术采用双轴气缸夹爪进行夹持并移动工件,人工对其进行打磨会导致变形,也不方便将毛刺去除,传统手工去毛刺抛光质量差效率低,现有的常规夹具很难固定住门把手或是夹持后存在重复定位不准确导致产品不合格,无法高效完整的打磨。
技术实现要素:
3.本实用新型的目的在于克服现有技术中存在的上述不足,而提供一种结构设计合理的具有自动锁螺丝功能的门把手打磨夹具。
4.本实用新型解决上述问题所采用的技术方案是:该具有自动锁螺丝功能的门把手打磨夹具,其结构特点在于:包括支架、浮动机构、滑动机构和锁丝机构,所述滑动机构安装在支架上,所述锁丝机构安装在滑动机构上,所述浮动机构与锁丝机构配合;所述支架包括夹具本体、连接板和连接法兰,所述夹具本体的一端与连接板连接,所述连接板与连接法兰连接,所述锁丝机构包括气动风批和抱紧座,所述抱紧座安装在滑动机构上,所述气动风批安装在抱紧座上。
5.进一步地,所述支架还包括夹具座、夹具杆和连接杆,所述夹具本体的一端与夹具座连接,所述夹具座与连接板通过夹具杆连接,所述连接板与连接法兰通过连接杆连接。
6.进一步地,所述夹具本体的另一端设置有锁紧螺丝,所述锁紧螺丝与气动风批配合。
7.进一步地,所述锁丝机构还包括连接座,所述抱紧座通过连接座安装在滑动机构上。
8.进一步地,所述锁丝机构还包括锁丝气缸和按钮推块,所述锁丝气缸安装在连接板上,所述按钮推块安装在锁丝气缸上。
9.进一步地,所述气动风批上设置有反转按钮,所述反转按钮与按钮推块接触。
10.进一步地,所述滑动机构包括滑板、导轨和滑块,所述滑板安装在连接板上,所述导轨安装在滑板上,所述滑块安装在导轨上,所述滑块上安装有连接座。
11.进一步地,所述滑动机构还包括滑轨挡块,所述滑轨挡块安装在滑板上。
12.进一步地,所述滑轨挡块与滑块接触。
13.进一步地,所述浮动机构包括弹簧底座和弹簧外壳,所述弹簧底座安装在连接座上,所述弹簧外壳安装在连接板上,所述弹簧外壳套装在弹簧底座上,且弹簧外壳内安装有弹簧,所述弹簧的两端分别与弹簧底座和弹簧外壳抵接。
14.相比现有技术,本实用新型具有以下优点:该具有自动锁螺丝功能的门把手打磨
夹具具有重复定位精准,产品锁紧后不易变形,打磨尺寸稳定等优点,安装浮动机构使得门把手打磨夹具带有浮动效果,可防止下压贴合门把手时压伤门把手,解决了产品质量、打磨时产品滑落问题大大节约了成本,缩短了工时,提高了打磨抛光的效率。
附图说明
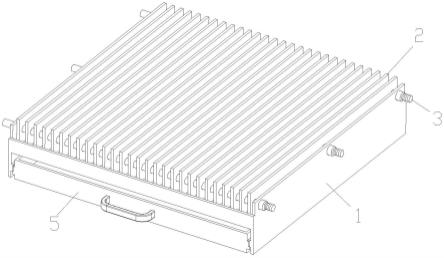
15.图1是本实用新型实施例的门把手打磨夹具的立体结构示意图。
16.图2是本实用新型实施例的门把手打磨夹具的立体结构示意图。
17.图3是本实用新型实施例的门把手打磨夹具的立体结构示意图。
18.图中:支架1、浮动机构2、滑动机构3、锁丝机构4、门把手5、
19.夹具本体11、夹具座12、夹具杆13、连接板14、连接杆15、连接法兰16、锁紧螺丝17、
20.弹簧底座21、弹簧外壳22、
21.滑板31、导轨32、滑块33、滑轨挡块34、
22.气动风批41、连接座42、抱紧座43、锁丝气缸44、按钮推块45、反转按钮46。
具体实施方式
23.下面结合附图并通过实施例对本实用新型作进一步的详细说明,以下实施例是对本实用新型的解释而本实用新型并不局限于以下实施例。
24.实施例。
25.参见图1至图3所示,须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容能涵盖的范围内。同时,本说明书中若有引用如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
26.本实施例中的具有自动锁螺丝功能的门把手打磨夹具,包括支架1、浮动机构2、滑动机构3和锁丝机构4,滑动机构3安装在支架1上,锁丝机构4安装在滑动机构3上,浮动机构2与锁丝机构4配合;通过锁丝机构4将门把手5固定在支架1上。
27.本实施例中的支架1包括夹具本体11、夹具座12、夹具杆13、连接板14、连接杆15和连接法兰16,夹具本体11的一端与夹具座12连接,夹具本体11的另一端设置有锁紧螺丝17,锁紧螺丝17与气动风批41配合,夹具座12与连接板14通过夹具杆13连接,连接板14与连接法兰16通过连接杆15连接。
28.本实施例中的锁丝机构4包括气动风批41、连接座42、抱紧座43、锁丝气缸44和按钮推块45,抱紧座43通过连接座42安装在滑动机构3上,气动风批41安装在抱紧座43上,锁丝气缸44安装在连接板14上,按钮推块45安装在锁丝气缸44上,气动风批41上设置有反转按钮46,反转按钮46与按钮推块45接触。
29.本实施例中的滑动机构3包括滑板31、导轨32、滑块33和滑轨挡块34,滑板31安装在连接板14上,导轨32和滑轨挡块34均安装在滑板31上,滑块33安装在导轨32上,滑块33上
安装有连接座42,滑轨挡块34与滑块33接触。
30.本实施例中的浮动机构2包括弹簧底座21和弹簧外壳22,弹簧底座21安装在连接座42上,弹簧外壳22安装在连接板14上,弹簧外壳22套装在弹簧底座21上,且弹簧外壳22内安装有弹簧,弹簧的两端分别与弹簧底座21和弹簧外壳22抵接。
31.具体的说,该具有自动锁螺丝功能的门把手打磨夹具在工作时通过机器人将支架1移动至门把手5的上方,将门把手5的两端卡在两个夹具本体11的外侧,机器人控制支架1向下移动时通过设置的浮动机构2使得气动风批41通气后正转将门把手5通过锁紧螺丝17与夹具本体11的另一端固定,浮动机构2内的弹簧可对气动风批41起到缓冲作用,避免气动风批41将门把手5压坏,将门把手5固定在夹具本体11后机器人将支架1置于打磨工位,可通过打磨机构对门把手5的外侧进行打磨,门把手5的内侧无需打磨,打磨完成后锁丝气缸44推动按钮推块45按动反转按钮46,对气动风批41通气控制气动风批41反转,通过气动风批41拧动锁紧螺丝17使得打磨后的门把手5与夹具本体11分离。
32.该具有自动锁螺丝功能的门把手打磨夹具的工作原理,将门把手打磨夹具安装于12kg机器人末端,使用6颗m4螺丝将连接法兰16固定在机器人末端法兰盘上,使用4颗m6螺丝将连接杆15固定在连接法兰16上,使用4颗m6螺丝将连接板14固定在连接杆15上,使用8颗m3螺丝将锁丝气缸44固定在连接板14上,使用4颗m3螺丝将按钮推块45固定在锁丝气缸44上,使用2颗m6螺丝和2个φ6*15定位硝将滑板31固定在连接板14上,使用2颗m5螺丝将弹簧外壳22固定在连接板14上,使用2颗m6螺丝将夹具杆13固定在连接板14上,使用4颗m5螺丝将两个导轨32固定在滑板31上,将滑块33套进导轨32上, 使用4颗m5螺丝将两个滑轨挡块34固定在滑板31上,使用2颗m5螺丝将弹簧底座21固定在连接座42上,将1*20*30mm弹簧塞进弹簧外壳22使用8颗m5螺丝将两个连接座42固定在滑块33上,使用8颗m6螺丝将抱紧座43固定在连接座42上,使用2颗m6螺丝将两个夹具本体11固定在夹具座12上,使用2颗m6螺丝将夹具座12固定在夹具杆13上,将气动风批41放进抱紧座43后放2颗m4螺丝(左右各一颗)由气动风批41顶着然后使用4颗m8螺丝将抱紧座43锁紧。
33.首先用夹具本体11位置将门把手5下压贴合,然后气动风批41通气三秒将门把手5锁紧后关气进行打磨抛光,打磨完成后机器人移动到门把手5开始位置时锁丝气缸44通气将气动风批41上的反转按钮46按下后,气动风批41通气三秒锁紧螺丝17松开后关气,门把手5下落回原处。
34.锁紧螺丝17的型号为m4*16内六角螺丝,滑块33的型号为egh20ca线性滑轨,导轨32的型号为egh20导轨,锁丝气缸44的型号为tn10*10s双轴气缸,气动风批41的型号为hhb-520pb气动风批。
35.此外,需要说明的是,本说明书中所描述的具体实施例,其零、部件的形状、所取名称等可以不同,本说明书中所描述的以上内容仅仅是对本实用新型结构所作的举例说明。凡依据本实用新型专利构思所述的构造、特征及原理所做的等效变化或者简单变化,均包括于本实用新型专利的保护范围内。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。