1.本发明涉及一种用于安抚婴儿的设备。
背景技术:
2.在背景技术中已知,在确定的频率处的振动可以调和睡眠。特别地,n.zhang、m.fard、mhu bhuiyan、d.verhagen、mfazari和s.r.robinson在journal ergonomics中发表的题为:“the effects ofphysical vibration on heart rate variabilityasa measure ofdrowsiness”的最新研究揭示了学者如何发现低频率处的持续振动(例如,我们在汽车中经历的振动)会使大脑和身体昏昏欲睡,并且当这种情况发生时,来自振动的感觉输入开始同步脑电波并“使大脑睡觉”。特别地,这个频率非常接近“θ(theta)波”,即一种与进入睡眠状态相关的脑电波,其产生“θ节律”,一种可以在脑电图(eeg)的执行中检测到的神经振荡模式。
3.尽管已经描述了两种类型的θ节律,“海马θ节律”(其表现出强烈的振荡)和“皮质θ节律”(其表示是eeg的低频率分量),一般来说,术语θ指的是在4至7hz之间的范围内的频率分量,无论其来源如何。在幼儿中经常观察到皮质θ,而在年龄较大的儿童和成人中,它往往出现在冥想、嗜睡、催眠或休眠状态,而不是在更深的睡眠阶段。因此,由于在文献中脑电图示出当受试者入睡时,θ波活动增加。
4.振动是“由压力波产生的机械振荡,压力波在参考位置周围通过弹性固体传输”;如果这些以大于15-20“重复次数/秒”(缩写为“赫兹”)的频率发生,则振动是声学的,即它会产生可听见的声音。另一方面,如果节奏较低,则可以将振动称为机械振动或适当振动。振动分为3个主要频率带,低频率振荡由运输方式(陆地、空中、海上)产生。除了频率之外,振动的特征还在于彼此密切相关的三个其他参数:
[0005]-振幅,即从平衡位置的最大运动;
[0006]-运动发生的速度;
[0007]-加速度,即速度变化。
[0008]
在这些参数中,加速度对于评估身体对振动的反应来说是最重要的,因为人类对刺激变化的感受比对刺激的持续性的感受更多。
[0009]
wo2018075566a1和wo2013059625a1描述了适于分析婴儿的哭泣并适于仅当指示婴儿的哭泣的音频信号超过某一阈值时通过激活婴儿躺在其上的床垫(mattress、褥垫、睡垫)的振动来进行干预的设备。
[0010]
us10238341b2描述了一种能够处理婴儿的哭泣、确定傅里叶变换和傅里叶变换的标准偏差的设备。婴儿的状态是基于该标准偏差确定的,例如通过将该标准偏差与一个或更多个数据表中输入的值进行比较,以验证标准偏差值是否对应于婴儿产生的声音值之一。基于婴儿的状态采取措施,诸如调整振动强度。
[0011]
鉴于背景技术,本发明的目的是提供一种不同于已知设备的用于安抚婴儿的设备。
技术实现要素:
[0012]
根据本发明,这样的目的是通过布置在床垫中的用于安抚婴儿的设备来实现的,所述设备包括床垫支撑件或底座,包括:
[0013]-用于检测婴儿在床垫上的重量的装置,
[0014]-用于检测婴儿的哭泣的装置,
[0015]-用于振动床垫的装置,其特征在于,它包括控制装置,该控制装置适于响应于婴儿在床垫上的所述重量检测装置确定婴儿在床垫上的重心并确定婴儿的躁动(agitation、焦虑不安),所述控制装置适于在与婴儿在床垫上的重心不同的位置控制所述床垫振动装置,并且在至少响应于检测到婴儿的哭泣和/或躁动的最大时间段内且不超过该最大时间段进行所述控制。
附图说明
[0016]
本发明的特征和优点将从以下对通过附图中的非限制性示例示出的本发明的实际实施方式的详细描述中变得明显,其中:
[0017]-图1示出了根据本发明的用于安抚婴儿的设备;
[0018]-图2示出了包括图1的设备的床垫;
[0019]-图3和图4示意性地示出了布置在图2的床垫底座中的根据本发明的设备;
[0020]-图5示出了床垫底座上的根据本发明的设备的实施方式;
[0021]-图6示出了图1的设备的控制单元的模糊逻辑。
具体实施方式
[0022]
图1至图6描述了根据本发明的用于安抚婴儿,特别是0到36个月的婴儿的设备100。
[0023]
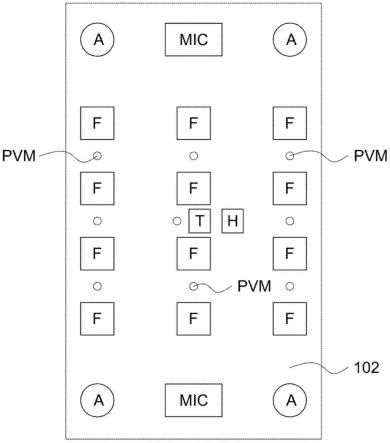
图1所示的设备100包括电子控制单元1,该电子控制单元电连接到多个麦克风mic、多个温度传感器t、多个扬声器a、多个力传感器f、和多个振动产生装置pvm例如压电装置、和湿度传感器h。
[0024]
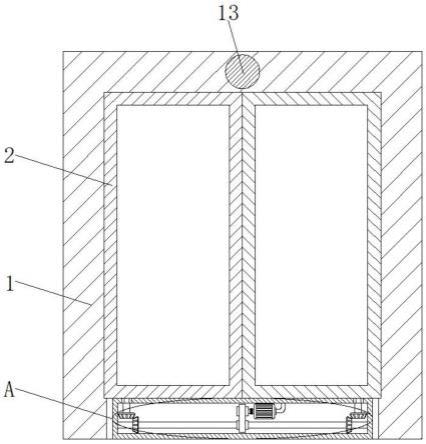
优选地,设备100被布置在婴儿床的底座101,优选地是木制的并且优选地矩形的底座上(图2至图5),在上表面102上方,床垫110被布置在该上表面上,婴儿被放置在该床垫上睡觉。底座101的垫111优选地被提供以保护安装在底座中的电子设备。
[0025]
如图3所示,在底座101的上部部分102中,两个麦克风mic布置成邻近底座101的短边、两个扬声器a、一个温度传感器t、多个力传感器f和多个振动装置pvm。
[0026]
如图4所示,底座101的上部部分102包括控制单元1,控制单元包括电子板,电子板中安装有微处理器pic、可移动存储卡sd和优选地射频数据传输/接收rf的模块bt,模块优选地是无线类型的,优选地与通过蓝牙协议的数据的传输/接收兼容。设备100的电源是外部的,优选地通过电池。底座101具有用于将存在于上部部分102上的设备与单元1电连接的轨道。或者,控制单元1在底座101的外部;底座始终包括通过模块rf与控制单元1无线通信的控制单元。
[0027]
扬声器a允许播放单元1的存储器sd中包含的来自婴儿母亲的音乐或消息。
[0028]
温度传感器t适于检测婴儿床内的温度并将其发送到单元1以与预定温度阈值进
行比较。
[0029]
多个力传感器f的传感器根据a
×
b矩阵布置,该矩阵允许识别婴儿在床垫上的位置即其重心s
bar
并计算婴儿的重量。力传感器布置在它们之间的一定距离d处以及距床垫的边的距离da处,例如对于长度为80cm和宽度为47.5cm的床垫,距离d=17.5cm并且距离da为15cm,如图5所示。
[0030]
优选地,振动装置pvm也按照矩阵布置。
[0031]
电子板还设置有检测婴儿的哭泣的强度的电容器c;电容器c由用于检测婴儿的哭泣的麦克风mic产生的电信号供电。
[0032]
控制单元1还适于通过麦克风mic检测并由单元1处理的数据来检测婴儿的哭泣的基本频率。
[0033]
控制单元1还适用于通过湿度传感器11检测到的数据来检测床垫的湿度。
[0034]
设备100适于控制致动器pvm的振动以引起床垫的振动并安抚婴儿。
[0035]
控制单元1优选地包括执行软件fl,执行软件根据实现图6所示的模糊逻辑控制器200的模糊逻辑进行操作。控制器200包括模糊化接口或模糊器201,模糊化接口或模糊器将测量数据明显地转换成的合适的语言值,遵循模糊化程序,模糊化程序通过将输入映射到每个特定参考体系中的模糊集合的标签来将客观数据转换成主观数据,从而将每个输入值xi转换成单个输入值对和隶属函数(xi,μi(x)),并且为此,整个集合被理解为其单个分量的并集。基本模糊控制规则的特征在于一批模糊的if
→
then规则,其中先决条件(前件)和后件涉及变量,根据该形式:
[0036]ri
:如果x是ai,
…
,并且y是bi,那么z是c
i i=1...n。
[0037]
其中,x,...,y和z是分别表示过程状态变量和控制变量的变量,并且ai,...,bi是变量x,...,y和z的值。
[0038]
控制器200包括推断电机202并且数据库包括基本规则203。推断电机必须计算隶属函数并且必须根据由模糊器201输入的变量并且根据基本规则203来处理系统输出。此外,控制器200是闭环类型的,因为隶属函数也是根据先前情况的结果来计算的。
[0039]
优选地,数据处理也发生在网络服务器的专用分区中,其中集成在每个设备100中的基本规则和推断电机被复制并驻留在本地。在这种情况下,系统的行为类似于婴儿状态的间接监测设备,并且控制器200的使用允许管理该任务并表征哭泣的类型;对于连接到网络的所有设备100,这发生在输入的连续获取过程和输出的处理之后。因此,连接到网络的所有设备100可以通过连接到上述网络服务器,通过优选地为https类型的连接,在模糊化和去模糊化过程中利用这些资源。在该连接中,每个设备100向现有数据库馈送在最后读取每个参数时更新的值,该参数定义各个规则,因此对于网络中的每个设备100,这些规则连续地且随着时间更新。在每一天结束时,计算每个参数的平均值,并且使得这样的值可用于下载,优选地为https类型,到网络中的每个连接的设备100。通过使用移动网关(设备100无线地,蓝牙兼容,连接到该网关)来保证上述到网络服务器的上传和/或下载连接。因此,在安装每个设备100时,通过连接到这样的网络服务器,这样可以下载更新后的规则的参数的值,而无需从单一规则定义的初始值开始。
[0040]
控制器200还包括去模糊器204,去模糊器适于将输出的语言值转换成数据,特别是转换成用于床垫的振动的电压或电流值。
[0041]
设备100提供一些输入数据由父母等输入;这些数据是婴儿的年龄、重量和性别xs(男m或女f)。
[0042]
对控制器200的输入信号的采样由微处理器pic运行的软件fl执行,采样时间根据输入的信号而变化。音频信号和压力水平的采样以1s的采样频率发生,而温度信号和湿度信号以30s的采样频率发生。
[0043]
婴儿身体在床垫上的重心s
bar
由位于力传感器f的axb矩阵中的位置(i;j)中的力或压力传感器f的读取值得出。系统检测力传感器f上的压力水平s,即,由于婴儿身体在位置(i;j)中的压力,在该位置的力传感器上的电压变化;如果这样的压力s高于指示为s
max
的参考阈值,则系统检测这种状况作为婴儿存在于该位置的确认。位置(i;j)不能是单一的;在这种情况下,系统会检查这两个位置是否邻近。
[0044]
对于每个力传感器f,以伏特为单位获取数字电气值或信号xf,并且将所述值转换成克,从而获得值sg。如果对应的压力值s大于参考值s
max
,则获取值xf,该参考值是转换成克的压力值,该压力值是在婴儿不在婴儿床的情况下和/或在没有力施加在该位置的情况下读取的,不包括床垫和/或力传感器f上方的材料的重量。
[0045]
床垫上压力的重心由下式给出:
[0046][0047]
其中a和b可以具有1至n之间的值,x
i,j
是力传感器在位置i;j的横坐标轴上的坐标;y
i,j
是力传感器在位置i;j的纵坐标轴上的坐标。x
bar
和y
bar
是重心s
bar
的横坐标轴和纵坐标轴上的坐标。考虑到床垫的矩形形状,使用的参考系统如图5所示,横坐标的x轴在长边上,纵坐标的y轴在短边上。
[0048]
麦克风mic获取音频信号作为模拟值。对该信号应用傅里叶变换以识别音频信号xa的基本频率。关于哭泣信号的规则如下:
[0049]
如果(200hz)≤xa≤(500hz),则婴儿在哭泣。
[0050]
如果婴儿在哭泣,则音频信号的隶属函数被计算为基本频率xa的函数,其如下:
[0051][0052]
其中ma是钟形函数的中心,并且计算如下:
[0053]
如果xs=m,即婴儿是男性,则:
[0054]
[0055]
其中t
max
是振动的最大持续时间。
[0056]
如果xs=f,即婴儿是女性,则:
[0057][0058]
其中σa是钟形函数的宽度,并且计算如下:
[0059][0060]
其中是在床垫已经发生了振动达时间t
max
之后在时间t
max
处的哭泣强度。
[0061]
因此,钟的宽度和中心根据时间t
max
处的哭泣强度值而变化。特别地,ma的初始值对于女性为320hz,并且对于男性为370hz;如果在tmax处(即哭泣强度不为零),则意味着婴儿尚未得到安抚,因此ma逐渐增加5hz,σa逐渐增加50hz,以在婴儿的哭泣的相同频率处贡献较高的振动强度。相反,如果在t
max
处哭泣强度等于0,则意味着婴儿已经得到安抚,并且因此ma减少5hz,σa减少50hz,以在婴儿的哭泣的相同频率处贡献较低的振动强度。
[0062]
哭泣强度通过电容器c上累积的能量来检测,并且在采样之后,获得相关的数字信号xz。
[0063]
哭泣强度的模糊规则如下:
[0064]
如果xz≠0,则婴儿在哭泣
[0065]
如果婴儿哭泣,则计算哭泣强度的隶属函数,其如下:
[0066][0067]
其中
[0068][0069][0070]
如果婴儿哭泣,则床垫在与婴儿重心s
bar
不同的位置中振动最多为t
max
的时间段。
[0071]zmin
和z
max
表示婴儿的哭泣强度的最小值和最大值,它们根据值而变化,该值是当婴儿哭泣或躁动时设备100执行的先前操作的时间t
max
处并且在床垫发生振动达从o至t
max
的时间段之后的哭泣强度的值。z
min
的初始值为1v,而z
max
的初始值为5v。如果在t
max
处哭泣强度不为零,则意味着婴儿尚未得到安抚,因此z
max
逐渐减少0.10v,以对婴儿的哭泣的相
同强度值贡献较高的振动强度。相反,如果在t
max
处哭泣强度等于0,则意味着婴儿已经得到安抚,因此z
max
增加0.10v,以对婴儿的哭泣的相同强度值贡献较低的振动强度。这个过程是连续的,并且在0-5v的振动强度限度内。
[0072]
优选地,控制器200的另一输入是婴儿的躁动的数字信号xg,其从对模拟信号xf的处理得出的,该模拟信号是每个力传感器f的以伏特为单位的值。它由值为0或1的躁动指数ρ加权。如果其中k是采样时间(1s),则躁动指数ρi为1,否则其为0。
[0073]
婴儿的躁动是
[0074]
模糊检查的规则为:
[0075]
如果xg≠0则婴儿躁动
[0076]
如果婴儿躁动,则计算隶属函数,其如下:
[0077][0078]
当
[0079][0080][0081]gmin
和g
max
表示婴儿的躁动的最小值和最大值,它们根据值而变化,即在床垫振动时间t
max
之后在时间t
max
处的躁动强度。g
min
的初始值为0,而g
max
的初始值为1。如果在t
max
处躁动强度不为零,则意味着婴儿尚未得到安抚,因此g
max
逐渐减小0.10,以对婴儿的相同躁动值贡献较高的振动强度。相反,如果在t
max
处躁动强度等于0,则意味着婴儿已经得到安抚,因此g
max
增加0.05,以对婴儿的相同躁动值贡献较低的振动强度。这个过程是连续的,并且在0-1的躁动限度内。
[0082]
优选地,控制器200的另一输入是婴儿睡觉的床垫的数字温度信号x
t
,其是从集成在床垫中的温度传感器t的读取值得出的。系统以数字方式检测以℃为单位的温度值。如果温度值低于指示的参考阈值t
min
(例如,15℃),则检测这种状况作为温度过低的确认。如果温度值高于指示为t
max
的参考阈值(例如40℃),则系统检测这种状况作为温度过高的确认。规则如下:
[0083]
如果x
t
≤t
min
则床垫的温度过低
[0084]
因此x
tmin
=1。
[0085]
知道床垫的温度过低是有用的,因为过冷的床垫会给婴儿带来不适,因此对婴儿
的安抚有负面贡献。
[0086]
如果x
t
≤t
max
则床垫的温度过高,因此x
tmin
=1。
[0087]
知道床垫的温度过高是有用的,因为过热的床垫会给婴儿带来不适,因此对婴儿的安抚有负面贡献。
[0088]
如果床垫温度过低或过高,则计算温度隶属函数x
t
,如下
[0089][0090]
其中m
t1
是与低温度相关的钟形函数的中心,并且计算如下:
[0091][0092]mt2
是与高温度相关的钟形函数的中心,并且计算如下:
[0093][0094]
σ
t1
是与低温度相关的钟形函数的宽度,并且计算如下
[0095][0096]
σ
t2
是与高温度相关的钟形函数的宽度,并且计算如下:
[0097][0098]
因此,钟形的宽度和中心根据在时间t
max
处的哭泣强度值而变化。特别地,m
t1
和m
t2
的初始值分别为17.5℃和30℃,而σ
t1
和σ
t2
的初始值分别为5℃和20℃。如果在t
max
处,(即哭泣强度不为零)和/或(即躁动强度不为0),则意味着婴儿尚未得到安抚,因此m
t1
和m
t2
逐渐增加0.1℃,而σ
t1
和σ
t2
逐渐增加0.05℃;这是为了对相同床垫温度贡献较高的振动强度。反之,如果在t
max
处哭泣强度和躁动强度都为0,则意味着婴儿已经得到安抚,因此m
t1
和m
t2
逐渐减少0.1℃,而σ
t1
和σ
t2
逐渐减少0.05℃,以在相同床垫温度处贡献较低的振动强度。
[0099]
优选地,的隶属函数根据以下公式:
[0100]
[0101]
其中是遵循以下趋势的无量纲系数:
[0102][0103]
优选地,的隶属函数根据以下公式:
[0104][0105]
其中是遵循以下趋势的无量纲系数:
[0106][0107]
无量纲系数和表示权重并且具有0至1之间的值,与过度低的温度(即低于t
min
)或过度高的温度(即高于t
max
)相关联。和的初始值(等于0.5)根据值t
max
、和增加或减少0.05。如果它们不为零并且因此婴儿尚未得到安抚,则无量纲系数的值增加0.05,并且反之,减少。这是为了对于相同床垫温度贡献较高(或在相反情况下较低)的振动强度。
[0108]
优选地,控制器200的另一输入是婴儿睡觉的床垫湿度的数字信号,其是从集成在床垫中的湿度传感器h的读取值得出的。该系统以数字方式检测湿度值,以百分比表示。如果相对湿度值高于指示为h
max
的参考阈值(例如,60%),则系统检测这种状况作为床垫湿度过高的确认。规则如下:
[0109]
如果xh≥h
max
则床垫湿度过高,因此
[0110]
如果床垫湿度过高,则计算输入xh的隶属函数,其如下:
[0111][0112]
其中mh是钟形函数的中心,并且计算如下:
[0113][0114]
σh是钟形函数的宽度,并且计算如下:
[0115][0116]
因此,钟的宽度和中心根据时间t
max
处的哭泣强度值而变化。特别地,mh的初始值
为50%,σh的初始值为90%;如果在t
max
处,(即哭泣强度不为零)及(即躁动强度不为0),则意味着婴儿尚未得到安抚,因此mh和σh逐渐增加1%,以对婴儿的哭泣的相同频率贡献较高的振动强度。反之,如果在t
max
处,哭泣强度和躁动强度都为零,则意味着婴儿已经得到安抚,因此mh和σh逐渐减少1%,以对相同床垫湿度贡献较低的振动强度。
[0117]
优选地,x
hmax
的隶属函数如下:
[0118][0119]
其中:是应用于“床垫湿度过高”状况的无量纲系数,其遵循以下趋势:
[0120][0121]
无量纲系数表示权重并且具有在0至1之间的值,与过度高的湿度(即,高于h
max
)相关联。的初始值(等于0.5)根据t
max
处的值、通过和增加或减少0.05。如果在t
max
处,(即哭泣强度不为零)及(即躁动强度不为0),则意味着婴儿尚未得到安抚,无量纲系数的值增加0.05,并且反之,减少。这是为了对于相同床垫湿度贡献较高(或在相反情况下较低)的振动强度。
[0122]
优选地,控制器200的另一输入是婴儿的尿布的排尿水平xm,并且从数字床垫湿度信号xh的值和婴儿的重量x
pg
的数字信号得出。需要在30秒的给定时间t处测量的这些值的两个样本来检测尿布中的排尿水平。规则如下:
[0123][0124]
xm=0,altrimenti
[0125]
如果婴儿尿湿了,计算输入xm的隶属函数,“婴儿尿湿了”,其如下:
[0126][0127]
其中:xg=1是母亲更换尿布的指示,并且γm是应用于“婴儿尿湿了”状况的无量纲系数,其遵循以下趋势:
[0128][0129]
无量纲系数γm表示重量并且具有在0至1之间的值,与婴儿尿湿了的状况相关联。ym的初始值(等于0.5)根据t
max
处的值、通过和增加或减少0.05。如果在t
max
处,(即哭泣强度不为零)及(即哭泣强度不为零)及(即躁动强度不为0),则意味着婴儿尚未得
到安抚,无量纲系数的值增加0.05,并且反之,减少。这是为了对于婴儿的尿布的相同排尿贡献较高(或在相反情况下较低)的振动强度。
[0130]
优选地,婴儿的父母可以输入关于婴儿的状况的数据,数据可以被认为是具有值0或1相应地如果它们不存在或者如果它们存在的输入变量。
[0131]
例如,婴儿已经吃过的数据可以被认为是变量xf,如果输入了婴儿已经吃过的数据,则取值为1,否则取值为0。
[0132]
输入xf的隶属函数,“婴儿已经吃过”。
[0133]
μ(xf)
[0134]
={1,se l
′
affermazione il neonato ha mangiato
è
"
è
vera0,altrimenti
[0135]
同样,婴儿已经改变的事实可以被认为是变量xg,如果已经输入了婴儿已经改变的数据,则该变量取值为1,否则它取值为0。
[0136]
输入xg的隶属函数,“婴儿已经改变”。
[0137]
μ(xg)
[0138]
={1,sel
′
affermazione"il neonato
è
stato cambiato"
è
vera0,altrimenti
[0139]
关于婴儿的重量的数据可以被认为是变量xe,如果已经输入了关于婴儿的重量的数据,则该变量取值为1,否则它取值为0。
[0140]
婴儿因为尿布满了而哭泣的数据可以被认为是变量xa,如果已经输入了婴儿因为尿布满了而哭泣的数据,则该变量取值为1,否则它取值为0。
[0141]
输入xa的隶属函数,“婴儿的尿布满了”。
[0142][0143]
婴儿由于另一原因而哭泣的数据可以被认为是变量xb,如果已经输入了婴儿由于该原因而哭泣的数据,则该变量取值为1,否则它取值为0。
[0144]
输入xb的隶属函数,“婴儿由于原因b而哭泣”。
[0145][0146]
控制器200的另一输入是与婴儿的重量x
pg
即婴儿的以克为单位的重量相关的数字信号。针对每个力传感器f测量值sg。然后将该值乘以每个传感器的传感器面积as,(sg*as)。然后通过执行以下操作来计算重量:
[0147][0148]
如果婴儿移动,则重新计算重量。
[0149]
规则如下:
[0150][0151]
其中t是采样时间(例如30s)。
[0152]
如果婴儿的重心也已经变化,即:
[0153]
则婴儿已经填满了尿布
[0154]
输入x
pg
的隶属函数如下:
[0155][0156]
其中,xe是父母指示的重量,m
pg
是钟形函数的中心,并且计算如下。
[0157][0158]
父母手动确认婴儿的性别和年龄,以便系统从下表中为p分配值。
[0159][0160][0161]
直到母亲手动输入初始值p,这等于8.9kg。
[0162]
扣除p的值后,σ
pg
的值由系统计算得到,钟形函数的宽度计算如下:
[0163][0164]
因此,钟的宽度和中心根据时间t
max
处的哭泣强度值而变化。特别地,m
pg
的初始值由表定义,而σ
pg
的初始值等于2kg。如果在t
max
处,(即哭泣强度不为零)及(即躁动强度不为0),则意味着婴儿尚未得到安抚,因此m
pg
增加100g,而σ
pg
增加0.05g;这是为了对于婴儿的相同重量贡献较高的振动强度。反之,如果在t
max
处,哭泣强度
和躁动强度都为0,则意味着婴儿已经得到安抚,因此m
pg
减少100g,而σ
pg
减少0.05g,以对于婴儿的相同重量贡献较低的振动强度。
[0165]
设备100根据以下方法操作。
[0166]
控制单元1在婴儿哭泣和/或躁动的情况下,控制在与婴儿在床垫上的重心不同的位置p中的床垫振动装置pvm,并且在最大时间段t
max
内且不超过该最大时间段;这是为了防止在床垫的发现婴儿的敏感部位诸如头部的部分发生振动。
[0167]
优选地,控制单元1仅控制在与婴儿的重心的位置不同的位置中的一个或更多个致动器pvm的振动。
[0168]
优选地,一旦已经接收到输入信号并且已经计算了数字变量或信号x的各种值,函数μ(x)就被加权并且床垫的振动根据其加权进行确定。
[0169]
特别地,来自控制器200的输出信号是由y=vibr
×
ti给出的y信号,其中vibr是电机pvm振动强度,ti是随时间变化的振动的持续时间,该持续时间遵循如下所述的函数ti(t),并且最大持续时间等于t
max
。仅当哭泣强度上的模拟信号xz不为零和/或与躁动相关的数字信号xg不为零时,才输出y信号。
[0170]
振动在不同于婴儿在床垫上的重心的位置p中执行;优选地,如果重心与其中心不重合,则位置p是相对于床垫长度和宽度与婴儿的重心互补的位置,即,考虑到由笛卡尔坐标c
bar
,y
bar
给出的婴儿的重心s
bar
的位置,位置p由x
max
(其是床垫沿x轴的以cm为单位的尺寸)与x
bar
和y
max
(床垫沿y轴的以cm为单位的大小)与y
bar
之间的差值给出:
[0171]
p={x
max-x
bar
;y
max-y
max
}
[0172]
如果重心与床垫的中心重合,则选择围绕床垫中心的位置作为位置p。
[0173]
振动强度vibr可以取o至1之间的值,并且计算如下:
[0174][0175]
其中σ是与所述输入相关的隶属函数μ(x)的总和,即隶属函数μ(x
pg
)、μ(xz)、μ(xa)、μ(xg)、μ(x
t
)、μ(xh)、μ(xm)、μ(xf)、μ(xb)、μ(xg)、μ(xa)或者仅其中一些的值的总和(如果不是所有输入都存在而是仅一些),并且σ
max
是隶属函数处于最大值时的总和σ的值。
[0176]
一旦已经获得vibr的值,将其近似为上阈值,将其置于下表的十个等级段(bracket、括号、括弧)之一中,其中左侧是振动强度vibr(指示为vibr标度)的等级段的近似值,右侧是对于每个单个参考括号,施加到位置p中的振动装置或致动器pvm的以毫安(ma)为单位的电流vibr。只有当哭泣强度上的数字信号xz不为零和/或与躁动相关的数字信号xg不为零时,才激活床垫的振动。
[0177]
[0178][0179]
ti随时间变化,考虑到等于t
max
的最大持续时间,由此:
[0180][0181]
其中:
[0182]-参数β计算如下:
[0183][0184]-参数t
max
计算如下:
[0185][0186]
并且和和分别是当婴儿哭泣或躁动时设备100执行的先前操作的时间t
max
处并且在床垫发生振动达从0至t
max
的时间段之后的哭泣强度和躁动强度的值。如果在时间t
max
内设定的振动能够安抚婴儿,则将值vibr、安抚婴儿所需的时间段tvibr和具有确定婴儿的安抚的较大权重的函数μ(x)记录在控制单元1的存储器sd中,使得设备100可以自学习当相同的状况发生时,即,在相同函数μ(x)具有较大权重的情况下,可以用相同的振动
值来安抚婴儿。此外,根据本发明的婴儿安抚系统是闭环系统,因为到达时间t
max
时婴儿的哭泣和/或躁动的存在与否是在上述各种函数μ(x)的确定中采用的值,并指示为和
[0187]
如果在时间t
max
之后婴儿继续哭泣,则向父母发送消息,并记录在振动强度值vibr中使用的具有较大权重的函数μ(x),以表征婴儿的哭泣。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。