1.本发明涉及打码设备技术领域,具体涉及一种预焙阳极炭块全自动激光打码装置及其方法。
背景技术:
2.铝电解用到的预焙阳极炭块(以下简称阳极炭块)从煤沥青、石油焦等原材料到成品的生产过程中,经过了很多道生产工序,每道工序的处理数据对阳极炭块的品质都有着至关重要的影响。
3.目前,在阳极炭块成型时,通过工人提前放置在模具里面代表班次等信息的模板或用油漆在成型出来的炭块表面印刷记号等方式给炭块做标记,把每道生产工艺的参数数据记录下来,跟记号进行关联,通过对记号的检索追查实现对阳极炭块产品进行生产信息的追溯。为了不影响生产效率,现有的标记都是按批标记的,即同一批的阳极炭块是相同的记号。但是实际生产时,每一个炭块的生产参数都不是完全相同的,所以无法对某个单独的阳极炭块进行追溯,只能进行批追溯。
技术实现要素:
4.本发明的目的之一在于:针对现有技术的不足,而提供一种预焙阳极炭块全自动激光打码装置,该装置能够实现对每个阳极炭块的追溯,同时减少工人的工作量,提高生产效率,降低管理成本。
5.为实现上述目的,本发明采用如下技术方案:
6.一种预焙阳极炭块全自动激光打码装置,包括用于输送阳极炭块的辊筒输送线以及对阳极炭块进行打码的激光打码机,所述激光打码机设置于所述辊筒输送线的上方,所述激光打码机包括机架、滑动设置于所述机架的三坐标机械手以及与所述三坐标机械手联动且对应所述辊筒输送线的激光器。本发明实现了阳极炭块在线实时打码,且每个阳极炭块的编码都是确定且唯一的,打码效率高、速度快,数据实时上传到mes进行追溯绑定,真正具备了阳极炭块溯源管理的基本条件。
7.作为本发明所述的预焙阳极炭块全自动激光打码装置的一种改进,所述激光打码机还包括用于控制所述三坐标机械手移动的控制柜。
8.作为本发明所述的预焙阳极炭块全自动激光打码装置的一种改进,所述激光打码机还包括设置于所述机架顶部的抽风机构。
9.作为本发明所述的预焙阳极炭块全自动激光打码装置的一种改进,所述辊筒输送线包括固定架、设置于所述固定架两端的驱动机构、滚动设置于所述固定架且与所述驱动机构连接的辊筒、设置于所述辊筒轴心的编码器、设置于所述固定架两侧的扶手、设置于所述辊筒上方且固定于所述扶手的光电对射传感器以及位于所述激光打码机入口的线激光传感器,所述编码器、所述光电对射传感器和所述线激光传感器均与所述控制柜电连接。
10.本发明的另一个目的在于提供一种预焙阳极炭块全自动激光打码方法,包括如下
步骤:
11.步骤1,将阳极炭块放置于辊筒输送线上,待阳极炭块进入到激光打码机内之后,使得阳极炭块在辊筒输送线上匀速向前移动;
12.步骤2,当光电对射传感器感应到阳极炭块后,随即启动线激光传感器开始扫描;
13.步骤3,当光电对射传感器感应到阳极炭块到位后,认为阳极炭块已经全部扫描完毕时,则关闭线激光传感器,停止辊筒输送线的工作,同时开始图像合成并计算所有炭碗中心位置坐标;
14.步骤4,系统根据步骤3得出的炭碗坐标计算出当前阳极炭块的打标位置和偏移角度,然后将打标位置和偏移角度数据发送给三坐标机械手;
15.步骤5,上述步骤4所述三坐标机械手带着激光器移动到目标位置,开启激光器打码,打码完成后,三坐标机械手回到原点位置,同时启动辊筒输送线向前移动,继续步骤1循环。
16.步骤4中计算当前阳极炭块的打标位置和偏移角度的具体算法是:
17.算法1,线激光传感器扫描炭块表面后,获取了灰度图像,计算出图像中所有炭碗的圆心的空间坐标(x/y/z);
18.算法2,软件将两个相邻的炭碗圆心坐标连成一条直线,取中点位置,计算其空间坐标(x/y/z)
19.算法3,以中点的空间坐标在x/y坐标构成的平面上对称生成一个长方形区域,该区域即是激光打码的区域。
附图说明
20.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施方式及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
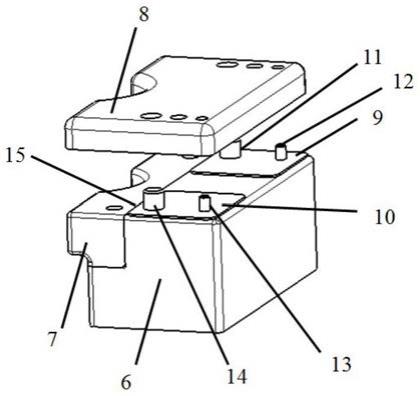
21.图1为本发明中实施例1的结构示意图之一;
22.图2为本发明中实施例1的结构示意图之二。
23.图3为本发明中实施例1的结构示意图之三。
24.图4为本发明中实施例2的阳极炭块打码区域的示意图。
具体实施方式
25.如在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可理解,硬件制造商可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名称的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”为一开放式用语,故应解释成“包含但不限定于”。“大致”是指在可接受的误差范围内,本领域技术人员能够在一定误差范围内解决所述技术问题,基本达到所述技术效果。
26.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
27.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
28.以下结合附图对本发明作进一步详细说明,但不作为对本发明的限定。
29.实施例1
30.如图1-3所示,一种预焙阳极炭块全自动激光打码装置,包括用于输送阳极炭块100的辊筒输送线1以及对阳极炭块100进行打码的激光打码机2,激光打码机2设置于辊筒输送线1的上方,激光打码机2包括机架21、滑动设置于机架21的三坐标机械手22以及与三坐标机械手22联动且对应辊筒输送线1的激光器23。
31.优选地,激光打码机2还包括用于控制三坐标机械手22移动的控制柜24。
32.优选地,激光打码机2还包括设置于机架21顶部的抽风机构25,可以实现激光打码机2的飞尘的抽取。
33.辊筒输送线1包括固定架11、设置于固定架11两端的驱动机构12、滚动设置于固定架11且与驱动机构12连接的辊筒13、设置于辊筒13轴心的编码器14、设置于固定架11两侧的扶手15、设置于辊筒13上方且固定于扶手15的光电对射传感器16以及位于激光打码机2入口的线激光传感器17,编码器14、光电对射传感器16和线激光传感器17均与控制柜24电连接,线激光传感器17根据编码器14提供的脉冲信号进行扫描,一个脉冲信号扫描一次。
34.实施例2
35.如图1-4所示,一种预焙阳极炭块全自动激光打码方法,包括如下步骤:
36.步骤1,将阳极炭块100放置于辊筒输送线1上,待阳极炭块100进入到激光打码机2内之后,使得阳极炭块100在辊筒输送线1上匀速向前移动;
37.步骤2,当光电对射传感器16感应到阳极炭块100后,随即启动线激光传感器17开始扫描;
38.步骤3,当光电对射传感器16感应到阳极炭块100到位后,认为阳极炭块100已经全部扫描完毕时,则关闭线激光传感器17,停止辊筒输送线1的工作,同时开始图像合成并计算所有炭碗中心位置坐标;
39.步骤4,系统根据步骤3得出的炭碗坐标计算出当前阳极炭块100的打标位置和偏移角度,然后将打标位置和偏移角度数据发送给三坐标机械手22;
40.步骤5,上述步骤4所述三坐标机械手22带着激光器23移动到目标位置,开启激光器23打码,打码完成后,三坐标机械手22回到原点位置,同时启动辊筒输送线1向前移动,继续步骤1循环。
41.步骤4中计算当前阳极炭块100的打标位置和偏移角度的具体算法是:
42.算法1,线激光传感器17扫描炭块表面后,获取了灰度图像,计算出图像中所有炭碗的圆心的空间坐标(x/y/z);
43.算法2,软件将两个相邻的炭碗圆心坐标连成一条直线,取中点位置,计算其空间坐标(x/y/z)
44.算法3,以中点的空间坐标在x/y坐标构成的平面上对称生成一个长方形区域,该
区域即是激光打码的区域30。
45.上述说明示出并描述了本发明的若干优选实施方式,但如前所述,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施方式的排除,而可用于各种其他组合、修改和环境,并能够在本文所述发明构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。