1.本发明涉及一种激光器件生产用装置,具体涉及一种半导体激光器件转料设备,用于激光器件生产中贴片和金丝键合工艺的料条转料。
背景技术:
2.激光器件生产过程中的贴片和金丝键合工艺,采用料条装载产品进行,料条上面放置需要加工的产品。为降低贴片设备的上下料频次,贴片设备采用料仓进行上下料;金丝键合设备采用料盒装载料条。于是,在完成贴片后,需要先将料仓内的料条转移到料盒后,再进行金丝键合。目前,料条的转料(从料仓转移到料盒)通常采用人工进行,不仅效率低下,还经常出现料条掉落的情况,造成材料的浪费。
技术实现要素:
3.本发明的目的在于提供一种方便料条从料仓转移到料盒,且不会出现料条掉落现象的半导体激光器件转料设备。
4.本发明所采用的技术方案是:
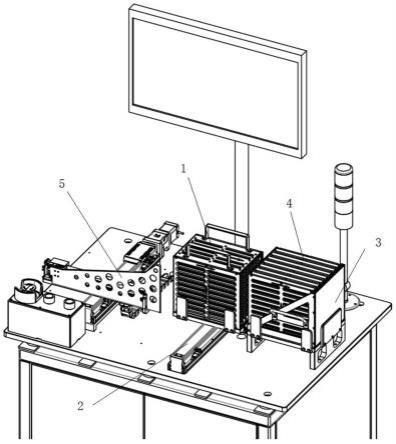
5.一种半导体激光器件转料设备,其包括料仓、料仓平台、料盒平台、料盒单元、推料机构、控制模块;
6.所述料仓置于料仓平台上,其包括多列料条存放区,每个料条存放区上设有多个料条存放层,该料条层的结构与横向设置的料条结构相适配;
7.所述料仓平台能带动料仓前后移动;
8.所述料盒平台置于料仓平台的一侧;
9.所述料盒单元置于料盒平台上,其包括成列设置的多个料盒,每个料盒上设有多个料条存放层,该料条存放层与料仓上的料条存放层相适配;
10.所述推料机构置于料仓平台的另一侧,用于将料仓内的料条快速推进料盒内;
11.控制模块包括第一接近传感器、第二接近传感器和控制器;第一接近传感器安设在料仓平台上;第二接近传感器安设在料盒平台上;
12.控制器控制料仓平台工作,使料仓平台上的料仓到达预设位置;当2个接近传感器分别检测到料仓、料盒置于预设位置时,控制器控制推料机构的推料杆将料仓内的第一列的多层料条推进第一个料盒内,完成第一次转料;推料杆缩回后移动到第二个转料位置,同时料仓平台也移动到第二个转料位置,将料仓内的第二列的多层料条推进第二个料盒内,完成第二次转料,重复上述步骤,直至完成所有料条的转料。
13.更进一步的方案是:所述推料杆的后端到前端的高度逐渐增大,且前端的高度略小于料条存放区长度,前端的厚度比料条宽度窄;推料杆的行程等于推料杆前端到料仓的距离 料仓的长度 料仓到料盒的距离;该结构的推料杆重量轻,且能良好的进行推料。
14.更进一步的方案是:所述推料杆上设有孔,所述推料杆的上端、前端、下端设有卷边,在确保推料杆强度的情况下,减少重量。
15.更进一步的方案是:所述推料机构包括电机驱动单元、气缸驱动单元、推料杆;气缸驱动单元与推料杆连接,并置于电机驱动单元上;
16.所述电机驱动单元包括第一电机和与第一电机连接的第一驱动平台;推料杆置于第一驱动平台上;控制器控制第一电机工作,第一电机带动第一驱动平台运动,从而实现推料杆的前后移动;
17.所述气缸驱动单元包括气缸,气缸的活塞与推料杆连接;控制器控制气缸工作,气缸带动活塞运动,从而实现推料杆的左右移动;
18.当第一接近传感器检测到料仓置于料仓平台上并置于预设的位置,以及第二接近传感器检测到料盒置于料盒平台上并置于预设的位置时,控制器根据第一接近传感器、第二接近传感器传来的数据控制电机驱动单元、气缸驱动单元工作;电机驱动单元使推料杆向后移动到达第一个转料位置,使推料杆与料仓内的第一列料条对齐;气缸驱动单元使推料杆向右移动,使推料杆将料仓内的第一列的多层料条推进第一个料盒内,完成第一次转料;推料杆在气缸驱动单元的带动下向左移动回位,电机驱动单元继续使推料杆向后移动到达第二个转料位置,同时料仓平台也移动到第二个转料位置,推料杆与料仓内的第二列料条对齐;气缸驱动单元使推料杆向右移动,使推料杆将料仓内的第二列的多层料条推进第二个料盒内,完成第二次转料,重复上述步骤,直至完成所有料条的转料。
19.更进一步的方案是:所述气缸驱动单元还包括底板和置于底板上的导向柱;所述底板置于电机驱动单元的第一驱动平台上;设置导向柱的目的是对推料杆进行导向,使推料杆不偏离,便于将料条推进料盒内。
20.更进一步的方案是:所述推料机构还包括保护单元,所述保护单元包括安设在推料杆上的阻力传感器,所述阻力传感器与控制器连接,当阻力传感器检测到推料杆的阻力达到阈值后,控制器控制气缸驱动单元将推料杆拉回;以避免推料杆损坏或者产品掉出而造成不良,确保了整个产品的稳定性和安全性,提高了使用寿命。
21.更进一步的方案是:所述料仓平台能带动料仓前后移动;其包括第二电机和与第二电机连接的第二驱动平台,第二驱动平台上设有料仓固定架、料仓固定气缸;料仓固定架略大于料仓,便于料仓的取放;料仓置于料仓固定架内,并通过料仓固定气缸限位、固定(因料仓固定架大于料仓,因此需要料仓固定气缸将料仓推到预设的位置进行限位和固定);控制器控制第二电机、料仓固定气缸工作,第二电机带动第二驱动平台运动,从而实现料仓的前后移动。
22.更进一步的方案是:所述料盒平台包括料盒固定架和和置于料盒固定架上的料盒固定气缸;料盒固定架略大于料盒单元;所述料盒单元置于料盒固定架内,并通过料盒固定气缸限位、固定(因料盒固定架大于料料盒,因此需要料盒固定气缸将料盒单元推到预设的位置进行限位和固定);当料条转料时,控制器控制料盒固定气缸松开料盒单元,实现料盒进料自适应,即:在料条被推进料盒的过程中,如果料盒和料仓/料条没有完全对齐,因料盒固定气缸松开料盒单元,使得料盒可以前后移动一个小距离,向进行位置的自适应,以便料条顺利送进料盒内。
23.更进一步的方案是:所述料盒的入口的两侧设有倒角,形成喇叭口,便于料条更加顺畅的进入料盒,避免了推料条时卡料等阻力过大的异常情况。
24.更进一步的方案是:所述每个料条存放区上设有10个料条存放层;每个料盒上设
有10个料条存放层;每个料条存放层包括放置料条的凹槽,该凹槽与料条形状相适配;每个料条存放层的入口设有倒角,形成喇叭口。转料时,可以一次将料仓一列的10个料条全部转移到料盒内,效率非常高。目前一列料条数量为10条,刚好为1个料盒的容量。所述料盒单元置于提篮内。
25.本发明的有益效果在于:
26.通过设置料仓平台、推料机构,便于将料条从料仓内转移到料盒内;
27.料仓平台带动料仓前后移动,使料仓每列依次与相对应的料盒对齐,确保料条顺利进入料盒且不会掉落,不会造成材料的浪费,降低了激光器生产成本;
28.通过自适应方式,大大提高了料条转移的成功率;降低了对加工件的要求,降低加工周期和成本
29.通过控制器控制料仓平台、推料机构工作,无需采用人工转料,提高了转料效率;
30.推料杆的一次推料动作,可实现多个料条的同时转料,可高效完成料条的转移,相比人工作业效率高且大大降低损伤产品的风险。
附图说明
31.下面将结合附图及实施例对本发明作进一步说明,附图中:
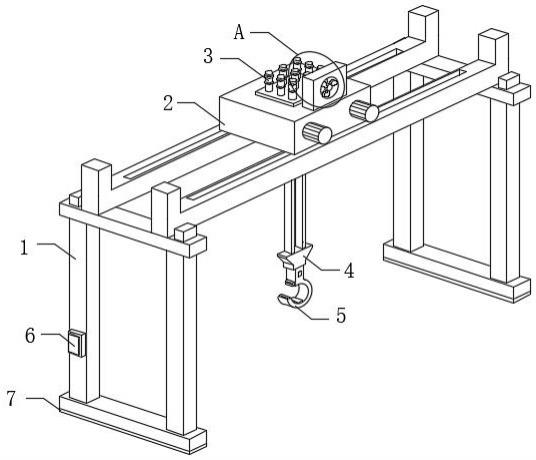
32.图1是半导体激光器件转料设备的整体结构示意图;
33.图2是一个料盒的结构示意图;
34.图3是7个料仓的结构示意图;
35.图4是料仓平台、料仓的连接示意图;
36.图5是料仓平台、料仓的另一个视角的连接示意图;
37.图6是推料机构的结构示意图;
38.图7是推料杆的推料示意图;
39.图8是料盒平台和料盒的连接示意图;
40.图9是推料杆的结构示意图;
41.图10是料条存放区上的料条存放层的结构示意图;
42.图11是料条的结构示意图;
43.图中:1、料仓,2、料仓平台,2.1、第二电机,2.2、第二驱动平台,2.3、料仓固定架,2.4、料仓固定气缸,3、料盒平台,3.1、料盒固定架,3.2、料盒固定气缸,4、料盒,5、推料机构,5.1电机驱动单元,5.1.1、第一电机,5.1.2、第一驱动平台,5.2、气缸驱动单元,5.2.1、底板,5.2.2、导向柱,5.3、推料杆,5.3.1、孔,5.3.2、卷边,5.4、保护单元,6、料条,7、料盒单元,8、倒角,9、料条存放层。
具体实施方式
44.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
45.参见图1-图11,一种半导体激光器件转料设备,其包括料仓1、料仓平台2、料盒平台3、料盒单元7、推料机构5、控制模块。料仓1置于料仓平台2上,其包括7列料条存放区,每
个料条存放区上设有10个料条存放层,该料条层的结构与横向设置的料条结构相适配;;料仓平台2能带动料仓1前后移动。料盒平台3置于料仓平台2的一侧;料盒单元7置于料盒平台3上,其包括成列设置的7个料盒4,每个料盒4上设有10个料条存放层9,该料条存放层与料仓的每个料条存放区上的料条存放层相适配,料盒4与料仓1间隔5毫米。推料机构5置于料仓平台2的另一侧,用于将料仓1内的料条6快速推进料盒4内。控制模块包括第一接近传感器、第二接近传感器和控制器;第一接近传感器安设在料仓平台2上;第二接近传感器安设在料盒平台3上。推料机构5包括电机驱动单元5.1、气缸驱动单元5.2、推料杆5.3、保护单元5.4。电机驱动单元5.1包括第一电机5.1.1和与第一电机5.1.1连接的第一驱动平台5.1.2;推料杆5.3置于第一驱动平台5.1.2上;控制器控制第一电机5.1.1工作,第一电机5.1.1带动第一驱动平台5.1.2运动,从而实现推料杆5.3的前后移动。气缸驱动单元5.2置于电机驱动单元上5.1;气缸驱动单元5.2包括气缸、底板5.2.1和置于底板5.2.1上的导向柱5.2.2,气缸的活塞与推料杆5.3连接,底板5.2.1置于电机驱动单元5.1的第一驱动平台5.1.2上;控制器控制气缸工作,气缸带动活塞运动,从而实现推料杆5.3的左右移动,因导向柱5.2.2的设置,使推料杆5.3不会偏离轨道。通过控制器控制电机驱动单元5.1工作,使推料杆5.3移动,与料仓平台2上的料仓1对齐;通过控制器控制气缸驱动单元5.2工作,使推料杆5.3将料仓1中的料条推进料盒4内。保护单元5.4包括安设在推料杆5.3上的阻力传感器,阻力传感器与控制器连接,当阻力传感器检测到推料杆5.3的阻力达到阈值后,控制器控制气缸驱动单元5.2将推料杆5.3拉回。
46.本实施例中,为了使推料杆5.3实现良好的推料效果,推料杆5.3的后端到前端的高度逐渐增大,且前端的高度略小于料条存放区长度,前端的厚度比料条6的宽度窄;推料杆5.3的行程等于推料杆5.3前端到料仓1的距离 料仓1的长度 料仓1到料盒4的距离。为了确保推料杆强度的情况下,减少重量,可在推料杆5.3上设有孔5.3.1,在推料杆5.3的上端、前端、下端设有卷边5.3.2。
47.本实施例中,料仓平台2包括第二电机2.1和与第二电机2.1连接的第二驱动平台2.2,第二驱动平台2.2上设有料仓固定架2.3、料仓固定气缸2.4。料仓固定架2.3略大于料仓1,便于料仓1的取放;料仓1置于料仓固定架2.3内,并通过料仓固定气缸2.4限位、固定(因料仓固定架2.3大于料仓1,因此需要料仓固定气缸2.4将料仓推到预设的位置进行限位和固定);控制器控制第二电机2.1、料仓固定气缸2.3工作,第二电机2.1带动第二驱动平台2.2运动,从而实现料仓1的前后移动。
48.本实施例中,为了便于料条更加顺畅的进入料盒4,每个料条存放层9包括放置料条的凹槽,该凹槽与料条6形状相适配;每个料条存放层9的入口设有倒角,形成喇叭口。转料时,可以一次将料仓一列的10个料条全部转移到料盒内,效率非常高。目前,一列料条数量为10条,刚好为1个料盒的容量。
49.本实施例中,为了避免因料盒4的个体差异以及7个料盒4组合造成的累积误差,料盒4在料盒平台3上设置了位置自适应,具体为:料盒平台3包括料盒固定架3.1和料盒固定气缸3.2;料盒固定架3.1略大于料盒单元7;料盒单元7置于提篮内,并置于料盒固定架3.1内,通过料盒固定气缸3.2限位、固定(因料盒固定架3.1大于料盒单元7尺寸,因此需要料盒固定气缸3.2将料盒单元7推到预设的位置进行限位和固定);当料条转料时,控制器控制料盒固定气缸3.2松开料盒单元7,实现料盒进料自适应,即:在料条6被推进料盒4的过程中,
如果料盒和料仓/料条没有完全对齐,因料盒固定气缸3.2松开料盒单元7,使得料盒4可以前后移动一个小距离,进行位置的自适应,以便料条顺利送进料盒内。
50.采用上述半导体激光器件转料设备进行转料的方法为:
51.将7个空料盒4阵列置于提篮内形成料盒单元7,将料盒单元7置于料盒固定架上,通过料盒固定气缸将料盒4进行限位、固定;
52.将1个装有料条的料仓1置于料仓固定架上(料条6放置在料仓内),并通过料仓固定气缸将料仓锁紧在料仓固定架,然后通过控制器控制料仓平台2将料仓固定架移动到预设位置,使料仓1第一列与第一个料盒4对齐;
53.当第一接近传感器检测到料仓置于料仓平台上并置于预设的位置,以及第二接近传感器检测到料盒置于料盒平台上并置于预设的位置时,控制器根据第一接近传感器、第二接近传感器传来的数据控制电机驱动单元、气缸驱动单元工作(电机驱动单元使推料杆前后移动,气缸驱动单元使推料杆左右移动);电机驱动单元使推料杆向后移动到达第一个转料位置,使推料杆与料仓内的第一列料条对齐,即使得推料杆5.3在前端位于料仓1的第一列的中间位置;通过气缸驱动单元使推料杆5.3向右运动,使推料杆将料仓内的第一列的10层料条推进第一个料盒内,完成第一次转料,过程中料盒4会有个小范围的位置自适应;
54.通过控制器控制气缸驱动单元,使推料杆在气缸驱动单元的带动下向左移动回位(推料杆5.3缩回),电机驱动单元继续使推料杆向后移动到达第二个转料位置,同时料仓平台2也移动到第二个转料位置,推料杆与料仓内的第二列料条对齐;气缸驱动单元使推料杆向右移动,使推料杆将料仓内的第二列的10层料条推进第二个料盒内,完成第二次转料,重复上述步骤,直至完成所有料条的转料(7列共70条料条全部被转移到料盒中)。
55.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。