1.本发明涉及建筑吊装技术领域,具体涉及一种装配式建筑智能吊装装置及 方法。
背景技术:
2.现有的吊装装置往往为吊塔式结构,其通过卷扬机的收卷来实现对于建筑 板的升降,然而,卷扬机的收卷绳容易在空中晃动,安全性低,且无法实现快 速的上下料。
3.因此,有必要提供一种装配式建筑智能吊装装置及方法以解决上述问题。
技术实现要素:
4.为实现上述目的,本发明提供如下技术方案:一种装配式建筑智能吊装装 置,包括安装架、转轮、链条、提升架以及定位与调整组件,其中,所述安装 架呈龙门状,其前后之间上下对称转动设置有两个具有动力的动力轴,所述动 力轴上同轴固定有转轮,两个转轮之间传动连接有链条,所述链条上垂直固定 有连接架,所述连接架远离链条的一侧为开口状,开口中固定设置有转轴,所 述转轴上转动设置有提升架,所述提升架上设置有定位与调整组件,所述调整 组件上能够水平放置建筑板或将建筑板调整为竖直状。
5.进一步,作为优选,所述转轴能够将提升架划分为左右两个部分;
6.所述安装架在高度上具有两个位置,分别为第一位置和第二位置,且第一 位置和第二位置处均固定有与提升架左右两个部分相对应的伸缩杆,当所述伸 缩杆伸长时能够限制提升架上移,当伸缩杆收缩时则解除限制。
7.进一步,作为优选,所述定位与调整组件包括底架、动力辊以及支撑板, 其中,所述底架为u型结构,底架中对称转动设置有具有动力的动力辊,两个 动力辊之间设置有固定于底架上的支撑板。
8.进一步,作为优选,两个动力辊之间传动连接有传送带。
9.进一步,作为优选,所述底架上对称固定有丝杠安装仓,所述丝杠安装仓 中转动设置有具有动力的丝杠,所述丝杠上传动连接有滑座,所述滑座的一侧 固定有轴仓,两个轴仓之间转动设置有具有动力的定位轴,所述定位轴的一侧 固定有定位板,所述定位板能够定位建筑板。
10.进一步,作为优选,所述轴仓的底部支撑于支撑板上;
11.所述丝杠安装仓的一侧固定有限位板,所述定位板的端部设置有限位肩, 所述限位肩由限位板所限位。
12.进一步,作为优选,所述安装架的底部固定于升降座的升降端上,所述升 降座的底部固定有底座。
13.一种装配式建筑智能吊装方法,包括如下步骤:
14.s1.固定底座,调整升降座的输出端高度;
15.s2.向位于最底部定位与调整组件上进行上料,使得建筑板的一端与传送带 相接触,并由动力辊进行驱动上料;
16.s3.转轮进行转动,从而驱动提升架进行循环移动,使得具有建筑板的定位 与调整组件向上移动;
17.s4.根据实际情况驱动第一位置上或第二位置上的伸缩杆进行伸缩,从而对 提升架进行水平定位;
18.s5.根据实际情况驱动建筑板水平移出或竖向移出,其中,水平移出时,利 用传送带直接传出即可,竖向移出时,利定位板对建筑板进行定位,并通过定 位轴进行转动调节建筑板至竖向,之后利用丝杠和滑座将其竖向移出。
19.与现有技术相比,本发明提供了一种装配式建筑智能吊装装置及方法, 具有以下有益效果:
20.本发明实施例中,利用转轮来限制链条的晃动,利用伸缩杆来限制提升 架的晃动,从而实现对于定位与调整组件的全面限制晃动,提升了整体的 安全性,另外,设置的定位与调整组件能够实现对于建筑板的高效上下料, 并且下料时能够使得建筑板以水平姿态或竖直姿态送出,便于提高装配效 率。
附图说明
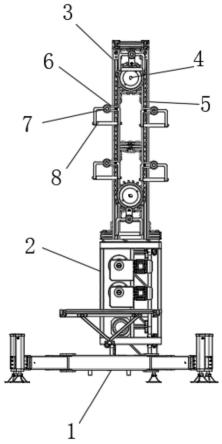
21.图1为一种装配式建筑智能吊装装置及方法的整体结构示意图;
22.图2为一种装配式建筑智能吊装装置及方法中提升架的结构示意图;
23.图3为一种装配式建筑智能吊装装置及方法中定位与调整组件的立体结构 示意图;
24.图4为一种装配式建筑智能吊装装置及方法中定位与调整组件的平面结构 示意图;
25.图中:1、底座;2、升降座;3、安装架;4、转轮;5、链条;6、连接架; 7、转轴;8、提升架;9、定位与调整组件;91、底架;92、动力辊;93、支撑 板;94、丝杠安装仓;95、丝杠;96、滑座;97、轴仓;98、定位轴;99、定 位板;910、限位板;911、限位肩。
具体实施方式
26.请参阅图1~4,本发明提供了一种装配式建筑智能吊装装置,包括安装架3、 转轮4、链条5、提升架8以及定位与调整组件9,其中,所述安装架3呈龙门 状,龙门状的安装架3可以看做是倒u型,如此,安装架3的前后之间可连接 为一整体,从而保证其稳定性,当然,为了进一步提升安装架3的稳定性,安 装架3也可以是“回”字型结构;
27.其前后之间上下对称转动设置有两个具有动力的动力轴,所述动力轴上同 轴固定有转轮4,两个转轮4之间传动连接有链条5,所述链条5上垂直固定有 连接架6,所述连接架6远离链条5的一侧为开口状,开口中固定设置有转轴7, 所述转轴7上转动设置有提升架8;其中,动力轴的动力可由外部减速电机组所 驱动,减速电机组具体为电机与减速器的组合,通过减速器能够输出稳定缓速 的转动动作,从而提升链条移动的稳定性;
28.所述提升架8上设置有定位与调整组件9,所述调整组件9上能够水平放置 建筑板或将建筑板调整为竖直状。
29.通过链条进行的传动,能够使得提升架8进行循环移动,该循环移动的轨 迹为椭圆形,使得提升架8上的定位与调整组件9实现接料、送料,并且定位 与调整组件9能够移动
至多个高度,灵活性较高;并且,链条由两个转轮4进 行支撑,不会被风体吹至晃动状态,从而实现高安全性。
30.本实施例中,所述转轴7能够将提升架8划分为左右两个部分;
31.所述安装架3在高度上具有两个位置,分别为第一位置和第二位置,且第 一位置和第二位置处均固定有与提升架8左右两个部分相对应的伸缩杆,当所 述伸缩杆伸长时能够限制提升架8上移,当伸缩杆收缩时则解除限制;也就是 说,本实施例中,配合施工的具体过程,配置有伸缩杆,伸缩杆能够限制提升 架8的向上位移,使之达到预设高度,并且由于第一位置和第二位置处均固定 有与提升架8左右两个部分相对应的伸缩杆,因此,伸缩杆还可限制提升架8 的左右晃动,也就是说,本实施例中,利用转轮来限制链条的晃动,利用伸缩 杆来限制提升架8的晃动,从而实现对于定位与调整组件9的全面限制晃动, 提升了整体的安全性。
32.本实施例中,如图3,所述定位与调整组件9包括底架91、动力辊92以及 支撑板93,其中,所述底架91为u型结构,底架91中对称转动设置有具有动 力的动力辊92,两个动力辊92之间设置有固定于底架91上的支撑板93,因此, 在对建筑板上料或下料时,通过动力辊能够进行辅助上料或下料。
33.作为较佳的实施例,两个动力辊92之间传动连接有传送带。传送带套设于 两个动力辊以及支撑板93外部,通过支撑板能够提供一定的支撑,通过传送带 能够增加传送面积,提升动力辊的上下料效果。
34.本实施例中,所述底架91上对称固定有丝杠安装仓94,所述丝杠安装仓 94中转动设置有具有动力的丝杠95,所述丝杠95上传动连接有滑座96,所述 滑座96的一侧固定有轴仓97,两个轴仓97之间转动设置有具有动力的定位轴 98,所述定位轴98的一侧固定有定位板99,所述定位板99能够定位建筑板。
35.具体而言,在一可选的实施例中,定位板99的下表面可以配置吸附盘,通 过负压吸附的方式来吸附定位建筑板;
36.在一可选的实施例中,定位板99的下表面可以对称固定夹持气缸,夹持气 缸的端部固定夹爪,通过夹持气缸和夹爪的配合实现对于建筑板的夹持定位;
37.作为较佳的实施例,所述轴仓97的底部支撑于支撑板93上;
38.所述丝杠安装仓94的一侧固定有限位板910,所述定位板99的端部设置有 限位肩911,所述限位肩99由限位板910所限位。
39.作为较佳的实施例,所述安装架3的底部固定于升降座2的升降端上,所 述升降座2的底部固定有底座1。
40.一种装配式建筑智能吊装方法,包括如下步骤:
41.s1.固定底座1,调整升降座2的输出端高度;
42.s2.向位于最底部定位与调整组件9上进行上料,使得建筑板的一端与传送 带相接触,并由动力辊进行驱动上料;
43.s3.转轮4进行转动,从而驱动提升架8进行循环移动,使得具有建筑板的 定位与调整组件9向上移动;
44.s4.根据实际情况驱动第一位置上或第二位置上的伸缩杆进行伸缩,从而对 提升架8进行水平定位;
45.s5.根据实际情况驱动建筑板水平移出或竖向移出,其中,水平移出时,利 用传送带直接传出即可,竖向移出时,利定位板99对建筑板进行定位,并通过 定位轴进行转动调节建筑板至竖向,之后利用丝杠和滑座将其竖向移出。
46.本发明实施例中,利用转轮来限制链条的晃动,利用伸缩杆来限制提升架8 的晃动,从而实现对于定位与调整组件9的全面限制晃动,提升了整体的安全 性,另外,设置的定位与调整组件能够实现对于建筑板的高效上下料,并且下 料时能够使得建筑板以水平姿态或竖直姿态送出,便于提高装配效率。
47.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不 局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据 本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保 护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。