1.本发明涉及用于狭窄腔体检测的绳驱机器人领域,具体涉及一种刚柔履带式机器人。
背景技术:
2.在狭窄腔体检测领域,柔性臂作为一种高冗余度的机械臂,在检测过程中可应对复杂的空间环境,克服狭窄腔体缺陷检测的空间不足及效率问题,并且通过绳驱控制确保柔性臂质量与惯性小,控制过程中具有更稳定、反应快、精度高等优点;
3.采用刚柔臂相结合的方式,将柔性臂装于两节固定臂上,两节固定臂的运动空间可弥补检测目标距离远问题,保证柔性臂更充分发挥其灵活性与避障能力,固定臂与柔性臂的结合可实现更广的工作空间;
4.在刚性臂控制领域,相比于直接使用电机驱动机械臂的方式,通过绳索驱动方式控制臂转动具有机构可调性强、空间紧凑、易于拆装等优点,并且利用螺栓将钢丝绳与驱动机构相固定,防止由于钢丝打滑导致脱力情况;
5.基座固定的柔性机器人工作时仅适用于固定点一定范围内进行操作控制,不具备基座灵活移动能力,工作空间受限。在野外腔体检测场景,刚柔履带式机器人中的刚柔臂安装在履带车上可控制整体移动到指定位置,且履带车可适应野外的复杂路面,有效提高检测检测机器人的应用广泛性;
6.在狭窄腔体检测领域,刚柔履带式机器人不仅能适用与室内腔体缺陷检测,并且能在野外这种检测范围广、目标位置灵活的环境下进行狭窄腔体的检测工作。
技术实现要素:
7.本发明的目的是为了提供一种可适用于野外复杂腔体检测的刚柔履带式机器人,以解决纯柔性臂、刚性臂与柔性臂混合机器人移动能力差、可达工作空间范围有限的问题。
8.本发明所采用的技术方案为:一种刚柔履带式机器人,具体包括履带车、法兰盘、托板、驱动器、固定臂ⅰ、固定臂ⅱ、柔性臂一、柔性臂二、柔性臂三、柔性臂四、柔性臂五、柔性臂六、柔性臂七、柔性臂八、固定螺栓
ⅰ‑ⅰ
、固定臂底座左侧板、转动轴ⅰ、法兰轴承ⅰ、固定臂ⅰ左侧板、钢丝绳ⅰ、转动轴ⅱ、法兰轴承ⅱ、侧板间固定轴、固定臂ⅱ左侧板、固定臂连接左侧板、带槽大滑轮、固定螺栓
ⅱ‑ⅰ
、定位螺栓ⅰ、双丝杆驱动装置ⅰ、张紧装置、双丝杆驱动装置ⅲ、双丝杆驱动装置ⅳ、定位螺栓ⅳ、钢丝绳导向装置、钢丝绳
ⅱ‑ⅰ
、固定臂ⅱ右侧板、臂关节
ⅰ‑ⅰ
、钢丝绳
ⅱ‑ⅱ
、定位螺栓ⅲ、丝杆驱动器固定内侧板。固定臂ⅰ结构呈中心对称,在其左右侧板上各安装有一套相同的绳驱机构,分别用于驱动固定臂ⅰ和固定臂ⅱ的转动;
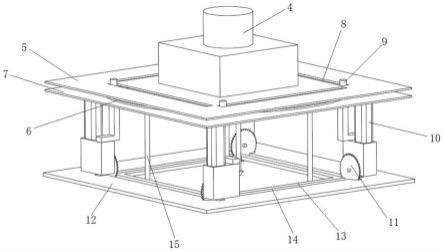
9.进一步地,法兰盘固定在履带车上,其自身可绕中心轴线相对履带车转动,托板与法兰盘通过螺栓固定,在法兰盘带动下,托板及其上的刚柔臂和驱动器等同步绕法兰盘中心轴线转动;
10.进一步地,固定螺栓ⅰ将钢丝绳ⅰ固定到双丝杆驱动装置ⅰ上,双丝杆驱动装置ⅰ中
的电机与减速器安装在和丝杆方向相同的一侧,驱动装置ⅰ的前后端均设有通孔,用于穿过钢丝绳,钢丝绳整条轨迹构成一个平面并与固定臂ⅰ左侧板相平行;
11.进一步地,钢丝绳由双丝杆驱动装置ⅰ的后端穿出至张紧装置上,钢丝绳以切向的角度盘绕至u型槽轮,且钢丝绳由双丝杆驱动装置ⅰ的前端穿出以切向角度盘绕至带槽大滑轮上;
12.进一步地,张紧装置中的滑动螺栓可在固定臂ⅰ左侧板上的导向槽内移动,在滑动螺栓松弛下转动推力螺栓调节移动侧板与固定方柱的间距,以控制钢丝绳ⅰ的松紧;
13.进一步地,带槽大滑轮通过螺栓与固定臂ⅱ连接,双丝杆驱动装置ⅰ工作时驱动钢丝绳ⅰ,钢丝绳ⅰ拉动带槽大滑轮的转动,控制固定臂ⅱ绕转动轴ⅰ中心轴线转动;
14.进一步地,柔性臂一具有一个自由度,由钢丝绳
ⅱ‑ⅰ
、钢丝绳
ⅱ‑ⅱ
驱动,工作时两钢丝绳的伸缩方向是相反的,通过两丝杆驱动装置控制钢丝绳运动,实现柔性臂一转动,且钢丝绳中间穿过导向装置,避免了钢丝绳与静止零件之间相对运动产生额外摩擦阻力;
15.本发明与现有技术相比具有以下特点:
16.1、本发明是一种刚柔履带式机器人,整体采用拼装式结构,两节刚性臂均是由左右两块侧板与转轴连接组成,内部安装组件方便,且各部分功能的执行机构简单,易于拆装与部件位置调整;
17.2、本发明中两节固定臂均采用绳索驱动,驱动装置均安装在两侧板上,空间充足易于调整布局,且装置中安装有张紧装置以调节钢丝绳松紧,确保工作时钢丝绳有效受力与驱动;
18.3、本发明中柔性臂采用绳索驱动,钢丝绳从双丝杆驱动装置输出后连接至钢丝绳导向装置,利用滑轮轴承组合引导钢丝绳走向,使钢丝绳保持轴向的姿态从驱动装置输出,避免钢丝绳与驱动装置输出端板等零件接触产生摩擦阻力影响控制精度;
19.4、本发明采用刚性臂、柔性臂、履带车相结合的结构方案,刚柔混合臂具有较大的可达工作空间与较强的空间避障能力,同时利用履带车的较强的移动能力,整体机器人可极大程度上满足在室内与野外等多种环境下高度、空间复杂程度、目标范围广的检测需求;
附图说明
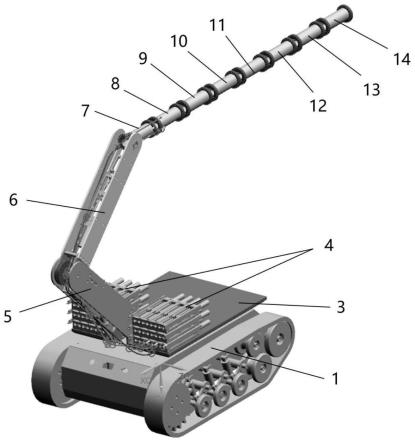
20.图1为刚柔履带式机器人的整体结构示意图;
21.图2为本发明中托板、法兰盘与履带车的装配示意图;
22.图3为本发明中使固定臂ⅱ相对固定臂ⅱ转动的驱动机构示意图;
23.图4为本发明中固定臂转动的驱动机构中的张紧装置示意图;
24.图5为本发明中柔性臂一驱动机构的装配示意图;
25.图6为本发明中钢丝绳导向装置的结构示意图;
26.图7为本发明中柔性臂二的驱动机构组成示意图;
27.附图中,各个标号所代表的部件说明如下:1-履带车、2-法兰盘、3-托板、4-驱动器、5-固定臂ⅰ、6-固定臂ⅱ、7-柔性臂一、8-柔性臂二、9-柔性臂三、10-柔性臂四、11-柔性臂五、12-柔性臂六、13-柔性臂七、14-柔性臂八、15-固定螺栓1-1、16-固定臂底座左侧板、17-转动轴ⅰ、18-法兰轴承ⅰ、19-固定臂ⅰ左侧板、20-钢丝绳ⅰ、21-转动轴ⅱ、22-法兰轴承ⅱ、23-侧板间固定轴、24-固定臂
ⅱ
左侧板、25-固定臂连接左侧板、26-带槽大滑轮、27-固定螺栓2-1、28-定位螺栓ⅰ、29-双丝杆驱动装置ⅰ、30-张紧装置、31-移动侧板、32-u型槽轮、33-固定螺栓
ⅲ‑ⅰ
、34-推力螺栓、35-固定方柱、36-移动侧板中心轴、37-法兰轴承ⅲ、38-滑动螺栓、39-双丝杆驱动装置ⅲ、40-双丝杆驱动装置ⅳ、41-定位螺栓ⅳ、42-钢丝绳导向装置、43-钢丝绳
ⅱ‑ⅰ
、44-固定臂ⅱ右侧板、45-臂关节
ⅰ‑ⅰ
、46-钢丝绳
ⅱ‑ⅱ
、47-定位螺栓ⅲ、48-丝杆驱动器固定内侧板、49-v型轴承滑轮ⅰ、50-滑轮固定轴ⅰ、51-v型轴承滑轮ⅱ、52-滑轮固定轴ⅱ、53-滑轮固定轴ⅲ、54-v型轴承滑轮ⅲ、55-滑轮固定轴ⅳ、56-v型轴承滑轮ⅳ、57-梯形定位板、58-钢丝绳一、59-钢丝绳二、60-碳纤维管一、61-臂关节
ⅰ‑ⅱ
、62-臂关节
ⅱ‑ⅰ
、63-十字轴、64-钢丝绳三、65-外侧垫板。
具体实施方式
28.下面结合附图对本技术进一步说明:本实施例是在以本发明技术方案为前提下进行实施,给出了具体实施方式和操作过程,但本发明保护范围不限于下述实施例。
29.如图1、图2、图3、图5所示,本发明涉及的一种刚柔履带式机器人,包括履带车1、法兰盘2、托板3、驱动器4、固定臂ⅰ5、固定臂ⅱ6、柔性臂一7、柔性臂二8、柔性臂三9、柔性臂四10、柔性臂五11、柔性臂六12、柔性臂七13、柔性臂八14、固定螺栓
ⅰ‑ⅰ
15、固定臂底座左侧板16、转动轴ⅰ17、法兰轴承ⅰ18、固定臂ⅰ左侧板19、钢丝绳ⅰ20、转动轴ⅱ21、法兰轴承ⅱ22、侧板间固定轴23、固定臂ⅱ左侧板24、固定臂连接左侧板25、带槽大滑轮26、固定螺栓
ⅱ‑ⅰ
27、定位螺栓ⅰ28、双丝杆驱动装置ⅰ29、张紧装置30、双丝杆驱动装置ⅲ39、双丝杆驱动装置ⅳ40、定位螺栓ⅳ41、钢丝绳导向装置42、钢丝绳
ⅱ‑ⅰ
43、固定臂ⅱ右侧板44、臂关节
ⅰ‑ⅰ
45、钢丝绳
ⅱ‑ⅱ
46、定位螺栓ⅲ47、丝杆驱动器固定内侧板48。其中,刚性臂ⅰ5结构呈中心对称,两侧板上装有一套相同的双丝杆绳索驱动装置,分别驱动固定臂ⅰ5和固定臂ⅱ6。托板3与履带车1由法兰盘2连接,法兰盘2固定在履带车1上,托板3与法兰盘2之间通过螺栓连接固定,法兰盘2的驱动电机装于履带车1内部,法兰盘2转动时带动托板及其上的刚柔臂转动。
30.如图3所示,双丝杆驱动装置ⅰ29两侧设有螺纹孔,利用螺栓固定在固定臂ⅰ左侧板19上,钢丝绳ⅰ20穿过双丝杆驱动装置ⅰ29中间孔,并用定位螺栓ⅰ28将钢丝绳ⅰ20上一处固定到双丝杆驱动装置ⅰ29的移动滑块上,通过丝杆推动滑块的移动从而拉动钢丝绳朝指定方向运动。
31.如图3所示,钢丝绳ⅰ20绕过带槽大滑轮26,其卡在滑轮中间的槽内,带槽大滑轮26内孔配合法兰轴承ⅱ22,使带槽大滑轮相对转动轴ⅱ21转动,圆柱面上钻螺纹孔安装螺栓,将钢丝绳ⅰ20一处与带槽大滑轮26固定,在钢丝绳ⅰ20运动下利用螺栓固定处的切向力使带槽大滑轮26转动。
32.如图4所示,固定方柱35通过固定螺栓
ⅲ‑ⅰ
33安装在固定臂ⅰ左侧板19上,移动侧板31通过滑动螺栓38安装在固定臂ⅰ左侧板19上,滑动螺栓38可在固定臂ⅰ左侧板19外侧的条形沉槽里调节位置,该沉槽平行于推力螺栓34的中心线。
33.如图4所示,固定方柱35与移动侧板31通过推力螺栓34连接,移动侧板中心轴36与移动侧板31固定,u型槽轮32与移动侧板中心轴36之间装有法兰轴承ⅲ37,使u型槽轮32转动时不会在移动侧板中心轴36上发生位置偏移。
34.如图4所示,固定方柱35上穿过推力螺栓34的两个孔为通孔,移动侧板31上推力螺
栓34的两个孔为螺纹孔,工作状态下钢丝绳ⅰ20对u型槽轮32施加垂直于移动侧板中心轴36中心线向上的力,推力螺栓34始终顶在固定方柱35上,通过拧紧推力螺栓34使移动侧板31向固定方柱35方向靠近,完成对钢丝绳ⅰ20张紧的过程。
35.如图5、图6所示,钢丝绳
ⅱ‑ⅰ
43一端通过定位螺栓ⅳ41固定到双丝杆驱动装置ⅲ39上的移动滑块,通过驱动滑块的移动来带动钢丝绳
ⅱ‑ⅰ
43运动,钢丝绳
ⅱ‑ⅰ
43在双丝杆驱动装置ⅲ39内所形成的直线与v型轴承滑轮ⅰ49的槽底所在圆相切,钢丝绳
ⅱ‑ⅰ
43从双丝杆驱动装置ⅲ39输出保持原方向,不会与驱动装置发生干涉以避免摩擦,钢丝绳
ⅱ‑ⅰ
43的走向与此同理。
36.如图5、图7所示,臂关节
ⅰ‑ⅰ
45左右侧均为圆柱凸台,通过配合轴承分别连接在固定臂ⅱ左侧板24、固定臂ⅱ右侧板44上,通过驱动钢丝绳
ⅱ‑ⅰ
43与钢丝绳
ⅱ‑ⅱ
46运动使臂关节
ⅰ‑ⅰ
45绕外侧垫板65的中心线转动;
37.如图7所示,柔性臂一7与柔性臂二8之间利用虎克铰结构进行连接,构成一个具有两个自由度关节,两个自由度相互垂直,当柔性臂一与7与柔性臂二8的轴心重合时为初始状态,钢丝绳一58、钢丝绳二59、钢丝绳三64在臂关节
ⅰ‑ⅱ
61与臂关节
ⅱ‑ⅰ
62之间的长度相同,通过驱动三根钢丝绳在臂关节
ⅰ‑ⅱ
61与臂关节
ⅱ‑ⅰ
62之间的长度使柔性臂二相对柔性臂一转动,每个关节运动由三个驱动器控制。
38.本发明的保护范围由所附权利要求限定。以上公开的实施例基本叙述本发明的所有一般性细节,也并非要限制本发明的范围。在本发明基础上进行改进,不脱离本发明的精神和原理而做出的等同替换和修改,均应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。