1.本发明属于空间探测技术领域,应用于空间站机械臂,尤其涉及一种空间机械臂末端抓取机构。
背景技术:
2.末端抓取机构安装在空间机械臂的肩、腕两端,可对固定和浮动的空间合作目标进行抓取,实现机械臂在轨爬行、支持航天员出舱等任务。目前已成功发射应用的机械臂末端执行器还包括国际空间站加拿大机械臂系统(ssrms)末端执行器、国际空间站欧洲臂era末端执行器,其中加拿大机械臂未能爬行,欧洲臂era末端执行器不能抓取浮动目标。
3.专利(cn105659728b)公开了一种绳索捕获式末端执行器,实现了对具有特定对接接口目标物的大容差捕获,但该末端执行器不能对目标物进行大预紧力锁紧以及电气连接。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,设计了一种新型的末端抓取机构与抓取方法,通过捕获、拖动和锁紧操作,可实现对目标适配器的大容差、高精度和高刚度抓取。
5.本发明目的通过以下技术方案予以实现:
6.一种空间机械臂末端抓取机构,用于对空间合作目标上的目标适配器抓取和释放,其特征在于,所述空间机械臂末端抓取机构包括壳体组件、捕获组件、锁紧组件与拖动组件;
7.所述壳体组件具有与所述目标适配器相耦合的结构,通过导轨约束所述捕获组件;
8.所述捕获组件用于实现对所述目标适配器的初始捕获;
9.所述拖动组件用于拖动完成捕获后的捕获组件与目标适配器,实现壳体组件与目标适配器的对接;所述拖动组件固定在壳体组件上,所述拖动组件包括拖动滚珠丝杠、拖动驱动组件、底盖、传动齿轮;拖动滚珠丝杠与拖动驱动组件固定在底盖上;拖动滚珠丝杠的一端通过传动齿轮与拖动驱动组件的输出端连接,拖动滚珠丝杠的另一端与捕获组件连接,通过拖动滚珠丝杠沿轴向作直线运动实现对捕获组件与目标适配器的拖动;
10.所述锁紧组件固定在壳体组件上,用于锁紧目标适配器,并实现与目标适配器的电连接。
11.优选的,所述锁紧组件包括至少4套锁紧机构、随动组件、锁紧驱动组件和大齿轮;锁紧机构、锁紧驱动组件和大齿轮固定在外壳的外表面,锁紧驱动机构与大齿轮通过齿轮啮合连接,大齿轮与所有锁紧机构通过齿轮啮合连接;随动组件固定用于电连接的电缆,随动组件固定在锁紧机构上。
12.优选的,所述锁紧机构包括滚轮、电连接器、连杆、锁紧支撑架、活动组件、碟簧组
件、小导轨、固定支架、锁紧滚珠丝杠;锁紧时,滚轮与目标适配器连接,电连接器与目标适配器实现电连接;
13.滚轮通过销轴连接在连杆上,连杆通过销轴连接在活动组件上,碟簧组件固定在活动组件上;
14.小导轨固定在壳体组件上,并通过转接件与锁紧支撑架连接;
15.固定支架、轴承支撑件固定在壳体组件上;
16.电连接器与随动组件固定在锁紧支撑架上;
17.锁紧滚珠丝杠螺母上设计有齿轮,固定在轴承支撑件上,锁紧滚珠丝杠穿过固定支架、活动组件后,与锁紧支撑架固定连接。
18.优选的,所述捕获组件包括固定环、钢丝绳组件、转动环、一维力传感器、滑块组件和捕获驱动组件;固定环与转动环之间通过轴承连接;钢丝绳组件的两端分别与固定环、转动环连接,钢丝绳组件至少有3套,沿固定环、转动环周向均匀分布;捕获驱动组件固定在固定环上,输出端通过齿轮与转动环连接;至少3组滑块组件固定在固定环上,沿固定环轴向均匀分布,并与所述导轨连接;一维力传感器固定在滑块组件上;捕获组件工作时,捕获驱动组件驱动转动环转动,带动钢丝绳组件一端运动,使得钢丝绳组件组成的初始圆收缩,捕获目标适配器。
19.优选的,所述捕获组件还包括2个到位开关,到位开关固定连接在固定环上,用于指示捕获组件的2个位置状态,分别是捕获起始位置和捕获终止位置。
20.优选的,所述拖动组件的底盖上装有供电模块,用于机械臂整臂配电控制。
21.优选的,还包括控制器,安装在壳体组件外侧,用于对捕获驱动组件、拖动驱动组件、锁紧驱动组件进行控制,并与机械臂通信。
22.优选的,还包括六维力传感器,与底盖连接,用于测量抓取过程中的受力情况。
23.优选的,还包括快换装置,与六维力传感器连接,用于实现对壳体组件、捕获组件、锁紧组件与拖动组件的组合体在轨更换。
24.一种空间机械臂末端抓取机构抓取方法,按序对目标适配器进行捕获、拖动、锁紧操作:
25.捕获操作:捕获驱动组件驱动转动环转动,带动钢丝绳组件的一端运动,使三套钢丝绳组件组成的初始圆收缩,直至将目标适配器捕获;
26.拖动操作:拖动驱动组件通过传动齿轮驱动拖动滚珠丝杠转动,丝杠螺母作沿轴向作直线运动,拖动捕获组件及目标适配器运动;拖动过程中,通过壳体组件与目标适配器耦合连接,进行末端抓取机构与目标适配器之间定位,实现末端抓取机构与目标适配器对接;
27.锁紧操作:锁紧驱动组件通过大齿轮同时驱动锁紧机构的锁紧滚珠丝杠螺母转动,丝杠连同锁紧支撑架、活动组件沿小导轨作直线运动,实现对目标适配器锁紧以及电连接。
28.优选的,通过控制器来控制捕获、拖动、锁紧操作。
29.本发明与现有技术相比具有如下有益效果:
30.1)该末端抓取机构通过捕获组件的结构设计,在捕获过程中,通过钢丝绳组件缠绕方式,驱动捕获杆运动至拖动初始位置,消除目标适配器、末端抓取机构之间的径向误
差,实现大容差柔性抓取,捕获位置容差优于100mm。
31.2)该末端抓取机构通过拖动组件的结构设计,在拖动过程中,通过粗定位、精定位操作,消除目标适配器、末端抓取机构之间的位姿误差,实现高精度对接,对接精度优于0.1mm。
32.3)该末端抓取机构通过锁紧组件的结构设计,在锁紧过程中,通过锁紧驱动组件带动大齿轮转动,大齿轮同步驱动所有锁紧机构对目标适配器进行大预紧力锁紧,锁紧刚度优于2e7nm/rad。
33.4)该末端抓取机构捕获、拖动和锁紧动作顺序衔接,在实现每一步动作的同时,为下一步动作提供初始运动条件,使得捕获组件、拖动组件和锁紧组件等组合集成为一个有机整体,分步实现对目标适配器的大容差捕获、高精度对接以及高刚度锁紧,并可实现在空间环境下对目标适配器的重复抓取。
附图说明
34.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
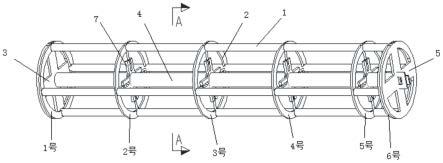
35.图1是本发明实施例提供的一种新型的末端抓取机构示意图;
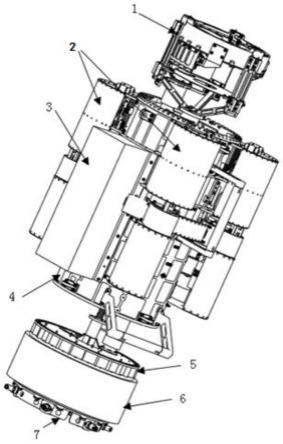
36.图2是本发明实施例提供的目标适配器组成示意图;
37.图3是本发明实施例提供的捕获组件组成示意图;
38.图4是本发明实施例提供的拖动组件组成示意图;
39.图5(a)是本发明实施例提供的锁紧组件组成示意图一;
40.图5(b)是本发明实施例提供的锁紧组件组成示意图二;
41.图5(c)是本发明实施例提供的锁紧组件组成示意图三;
42.图6是本发明实施例提供的壳体组件组成示意图。
具体实施方式
43.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
44.本发明提供的一种新型的末端抓取机构,用于对空间合作目标上的目标适配器抓取和释放。目标适配器具有与末端抓取结构相耦合的结构,图2是目标适配器的一种典型结构,包括捕获杆37、凸轮38、对接齿盘39、卡爪40和浮动电连接器41。
45.末端抓取机构,如图1所示,包括捕获组件1、锁紧组件2、控制器3、壳体组件4、拖动组件5、六维力传感器6和快换装置7。在本实施例中,捕获组件1通过三根导轨36约束在壳体组件4内部,端部安装的一维力传感器11与拖动组件5的拖动滚珠丝杠螺母15连接。拖动组件5与壳体组件4通过螺钉连接。锁紧组件2设置四套锁紧机构,分布在壳体组件4周边,通过固定支架29、轴承支撑架31和小导轨28与壳体组件4连接,锁紧驱动组件32通过螺钉固定在
壳体组件4上。壳体组件的组成如图6所示,包括导轨36、端齿盘35和外壳34,端齿盘35与凸轮38、对接齿盘39的结构相耦合。
46.捕获组件1用于对目标适配器的初始捕获,捕获组件1可以通过三根导轨36约束在壳体组件4内部。图3为捕获组件1组成示意图,包括固定环8、到位开关9、滑块组件10、一维力传感器11、钢丝绳组件12、转动环13和捕获驱动组件14。固定环8与转动环13之间通过薄壁轴承进行连接,2个到位开关9通过螺钉固定在8固定环上,用于指示捕获起始位置和捕获终止位置;钢丝绳组件12一端与固定环连接,另一端与转动环连接,共三套,沿固定环8、转动环13周向120度均匀分布。捕获驱动组件14固定在固定环8上,输出端通过齿轮与转动环13连接。滑块组件10固定在固定环8上,共3组,沿固定环8周向120度均匀分布,并与导轨36连接,滑块组件与导轨一一对应。一维力传感器11固定在滑块组件10上。捕获组件工作时,捕获驱动组件14驱动转动环13转动,带动钢丝组件12的一端运动,使得三套钢丝绳组件12组成的初始圆收缩,直至将捕获杆捕获。整个捕获过程可实现捕获位置容差优于100mm,姿态容差优于15
°
。
47.图4为拖动组件5组成示意图,拖动组件5固定在外壳底面上,包括拖动滚珠丝杠15、供电模块16、拖动驱动组件17、底盖18和传动齿轮19。拖动滚珠丝杠15通过一对轴承固定在底盖18中轴线上,且一端与传动齿轮19连接,另一端与捕获组件1端部的一维力传感器11连接。拖动驱动组件17固定在底盖18上,输出端通过传动齿轮19与拖动滚珠丝杠15连接。供电模块16通过螺钉固定在底盖18上。拖动组件5工作时,拖动驱动组件17通过传动齿轮19驱动拖动滚珠丝杠15转动,拖动滚珠丝杠15螺母作沿轴向作直线运动,拖动目标适配器与末端抓取机构对接,消除二者之间的位姿误差。拖动过程中通过端齿盘35依次与凸轮38、对接齿盘39配合,分别实现末端抓取机构与目标适配器之间的粗定位和精定位,实现二者高精度对接,对接精度优于0.1mm。安装在底盖上的供电模块16,用于机械臂整臂配电控制。
48.图5(a)(b)(c)均为锁紧组件组成示意图,锁紧组件包括锁紧机构20、随动组件21、锁紧驱动组件32和大齿轮33。4套锁紧机构20、锁紧驱动组件32和大齿轮33固定在外壳的外表面,锁紧驱动机构32与大齿轮33通过齿轮啮合连接,大齿轮33与4套锁紧机构20通过齿轮啮合连接。随动组件21用于固定进行电连接的电缆,随动组件21的数量与锁紧机构20数量相同,每一个随动组件固定在一个锁紧机构上。
49.其中,锁紧机构20包括滚轮22、电连接器23、连杆24、锁紧支撑架25、活动组件26、碟簧组件27、小导轨28、固定支架29、锁紧滚珠丝杠30、轴承支撑件31。滚轮22通过销轴连接在连杆24上,连杆24通过销轴连接在活动组件26上,碟簧组件27通过螺钉固定在活动组件26上,小导轨28固定在壳体组件4上,并通过转接件与锁紧支撑架25连接。固定支架29、轴承支撑件31通过螺钉固定在壳体组件4上,锁紧滚珠丝杠30螺母上设计有齿轮,并通过一对角接触轴承固定在轴承支撑件31上,丝杠穿过固定支架29、活动组件26后,与锁紧支撑架25固连;电连接器23与随动组件21固定在锁紧支撑架25上,随动组件21用于固定与电连接器23连接的电缆。锁紧组件工作时,锁紧驱动组件32通过大齿轮33同时驱动4套锁紧机构20的锁紧滚珠丝杠30螺母转动,锁紧滚珠丝杠30连同锁紧支撑架25、活动组件26沿小导轨28作直线运动,,随动组件21沿轴向做直线,运动滚轮22与卡爪40连接,电连接器23与目标适配器的浮动电连接器41对接,实现对目标适配器卡爪40的大预紧力锁紧以及电连接器连接,锁紧刚度优于2e7nm/rad。
50.控制器3用于整个末端抓取机构的抓取控制、自身温度控制以及与机械臂通信等功能。
51.六维力传感器6安装在末端尾部,与拖动组件5连接,用于测量末端抓取机构抓取过程中的受力情况。
52.快换装置7与六维力传感器连接,用于实现在轨快速更换。
53.本发明提供的一种空间机械臂末端抓取方法,通过控制器来按序进行捕获、拖动、锁紧三个操作步骤:
54.捕获操作:捕获驱动组件14驱动转动环13转动,带动钢丝绳组件12的一端运动,使三套钢丝绳组件12组成的初始圆收缩,直至将空间合作目标的目标适配器上捕获杆37捕获;
55.拖动操作:拖动驱动组件17通过传动齿轮19驱动拖动滚珠丝杠15转动,丝杠螺母作沿轴向作直线运动,拖动捕获组件1及目标适配器运动。拖动过程中,通过端齿盘35依次与凸轮38、对接齿盘39配合,分别进行末端抓取机构与目标适配器之间的粗定位和精定位,实现末端抓取机构与目标适配器对接;
56.锁紧操作:锁紧驱动组件32通过大齿轮33同时驱动4套锁紧机构20的锁紧滚珠丝杠30螺母转动,丝杠连同锁紧支撑架25、活动组件26沿小导轨28作直线运动,实现对目标适配器上卡爪40的锁紧以及电连接器连接。
57.释放过程是抓取的逆过程,即先锁紧释放,然后拖动释放,最后捕获释放,实现对目标适配器的释放。
58.释放过程完成后,末端抓取机构恢复至初始状态。再次抓取时,按上述方法,依次进行捕获、拖动和锁紧三个操作步骤,实现对目标适配器再次抓取;释放时,依次进行锁紧释放,拖动释放和捕获释放三个操作步骤,实现对目标适配器再次释放。重复上述步骤,可实现对目标适配器的多次重复抓取。
59.以上所述的实施例只是本发明较优选的具体实施方式,本领域的技术人员在本发明技术方案范围内进行的通常变化和替换都应包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。