1.本发明涉及工业运输技术领域,具体为一种重载应急救援机器人的行走机构。
背景技术:
2.矿山是指有一定开采境界的采掘矿石的独立生产经营单位,一般包括一个或多个采矿车间或坑口、矿井、露天采场等。但是,对于矿山的开采过程中,有着的一定的危险因素,塌落、塌陷等状况,因此,需要备用一些紧急急救装置,如救援机器人。而现有的救援机器人,其救援过程中,若遇到高斜坡、高角度倾斜的石体或矿山面,无法前行,导致救援物资难以运送或收集矿山状况,尤其是对于一些载重较大的行径机器装置,行进在凹凸复杂路面的路况时,以及大面域高坡度路障时,其行径的稳定性难以确保。
3.因此,本领域技术人员提供了一种重载应急救援机器人的行走机构,以解决上述背景技术中提出的问题。
技术实现要素:
4.为实现上述目的,本发明提供如下技术方案:一种重载应急救援机器人的行走机构,其包括设置多组的行进架体,相邻所述行进架体通过衔接件衔接组成串连行进体,所述行进架体包括:
5.承载托架座,其下端面安装有负载横梁架,且所述负载横梁架中部安装有抓地装置;
6.扩缩组件,两侧对称安装于所述负载横梁架上,用于驱动调控抓地装置,且所述扩缩组件输出端部还安装有行进支臂。
7.作为本发明的一种优选技术方案,所述扩缩组件包括:
8.导向杆,横向平行设置两组,且所述导向杆平行夹腔内设有螺杆,所述螺杆由电机一驱动;
9.负载座,其上端部分别安装有与导向杆滑动连接的负载双筒板、与螺杆啮合连接的螺套座,且所述负载座还用于衔接件以及行进支臂的设置安装。
10.作为本发明的一种优选技术方案,所述行进支臂包括:
11.弹性支承架臂,呈三角结构形态,其下角端部安装有负载罩座,所述负载罩座内安装有电机二;
12.行进轮,其上端部转动安装于所述负载罩座上,并与所述电机二输出端同轴固定。
13.作为本发明的一种优选技术方案,所述抓地装置包括:
14.固定座,其中部转动安装有可被电机三驱动旋转的旋套杆,且所述旋套杆内开设有下连通的十字柱腔;
15.导向筒架,其上端部通过复位弹簧与固定座相衔接,且所述导向筒架下筒腔壁上开设有轴向的导向条缝;
16.导向条板,贯穿所述导向条缝滑动连接,且所述导向条板外端部固定有滑动座,所
述滑动座还通过推杆与螺套座相衔接,所述推杆中部还通过弹性杆一与固定座相衔接;以及
17.钻筒杆,其包括有设置于外筒壁上的螺旋凸筋、同轴固定于内筒腔中的且与十字柱腔滑动连接的十字柱杆以及内筒腔中预置的且可被旋套杆嵌入的容置环腔,且钻筒竿上端外筒壁与导向条板内端头通过轴承连接。
18.作为本发明的一种优选技术方案,所述导向筒架下端头上安装有贴固罩,所述贴固罩外径端部与滑动座通过弹性杆二相衔接。
19.作为本发明的一种优选技术方案,所述贴固罩为刚性结构,其内罩壁上开设有形变卡槽,所述形变卡槽的深度由外之内依次降低。
20.作为本发明的一种优选技术方案,所述贴固罩中部安装于用于清洁钻筒杆的清洁绵。
21.作为本发明的一种优选技术方案,所述衔接件包括:
22.推进伸缩杆,其两端端部分别与八字支架两端端部相铰接,且所述八字支架左右支杆的端部均为铰接连接结构;
23.衔接块,用于推进伸缩杆与行进架体之间的衔接,且所述衔接块包括有固定柱、万向联轴器。
24.作为本发明的一种优选技术方案,还包括有:
25.智能处理模块;
26.视觉模块,用于识别外部环境图像,且外部环境图像至少包括有路径、障碍物;
27.三维扫描模块,用于扫描面向的障碍物坡面、行进路面,并反馈于智能处理模块中模拟绘制展障碍物坡面、行进路面,并对障碍物的坡面与水平面之间所夹的相对角度进行模拟计算;以及
28.压力感应模块,安装于行进轮上,用于监测行进轮与行进路面存有的压力状况,并反馈于智能处理模块中。
29.与现有技术相比,本发明提供了一种重载应急救援机器人的行走机构,具备以下有益效果:
30.本发明中通过串连结构的行走机构,使得行走机构更加灵活,而通过抓地装置、衔接件的结构设置,使得在遇到高坡面障碍物时,通过抓地装置以及衔接件的使用,促使串连行进体的行进模式变为蠕动行进结构,进而跨越高坡面障碍物,进而完成救援物资的运送和外部环境状况数据信息的收集。
附图说明
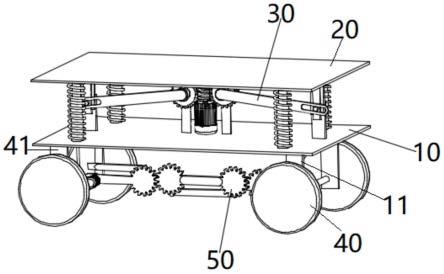
31.图1为本发明的行进架体结构示意图;
32.图2为本发明的爪地装置局部结构放大示意图;
33.图3为本发明的钻筒杆局部结构放大示意图;
34.图4为本发明的衔接件局部结构放大示意图;
35.图5为本发明的控制结构示意图;
36.图中:1、行进架体;2、衔接件;3、承载托架座;4、负载横梁架;5、扩缩组件;6、行进支臂;7、抓地装置;21、推进伸缩杆;22、八字支架;23、固定柱;24、万向联轴器;51、导向杆;
52、螺杆;53、电机一;54、负载座;55、负载双筒板;56、螺套座;61、弹性支承架臂;62、负载罩座;63、行进轮;64、电机二;71、电机三;72、固定座;73、旋套杆;74、十字柱腔;75、复位弹簧;76、导向筒架;77、导向条缝;78、滑动座;79、导向条板;710、钻筒杆;711、十字柱杆;712、容置环腔;713、螺旋凸筋;714、弹性杆一;715、推杆;716、弹性杆二;717、贴固罩。
具体实施方式
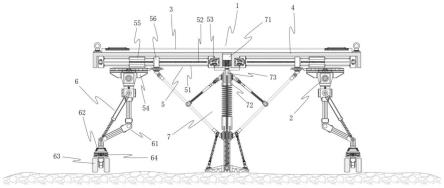
37.参照图1-5,本发明提供一种技术方案:一种重载应急救援机器人的行走机构,其包括设置多组的行进架体1,相邻所述行进架体1通过衔接件2衔接组成串连行进体,所述行进架体1包括:
38.承载托架座3,其下端面安装有负载横梁架4,且所述负载横梁架4中部安装有抓地装置7;
39.扩缩组件5,两侧对称安装于所述负载横梁架4上,用于驱动调控抓地装置7,且所述扩缩组件5输出端部还安装有行进支臂6;
40.通过串连行进体的结构设置,从而提高了行走结构的灵活性,并通过独立调控的抓地装置的设置,从而使得串连行进体能够跨越高坡度的障碍物,且不易出现翻车现象,甚至可呈倒挂式抓固蠕动行进。
41.本实施例中,所述扩缩组件5包括:
42.导向杆52,横向平行设置两组,且所述导向杆52平行夹腔内设有螺杆52,所述螺杆52由电机一53驱动;
43.负载座54,其上端部分别安装有与导向杆52滑动连接的负载双筒板55、与螺杆52啮合连接的螺套座56,且所述负载座54还用于衔接件2以及行进支臂6的设置安装;
44.当电机一驱动螺杆调控行进支臂外移时,抓地装置进行纵向收缩至负载横梁架一侧,当电机一驱动螺杆调控行进支臂内移时,抓地装置进行纵向延伸至其下方行进路面一端,并作为抓地装置持续下移延伸的的推动力。
45.本实施例中,所述行进支臂6包括:
46.弹性支承架臂61,呈三角结构形态,其下角端部安装有负载罩座62,所述负载罩座62内安装有电机二64,用于缓冲沿行进轮面行进时产生的振动力;
47.行进轮63,其上端部转动安装于所述负载罩座62上,并与所述电机二64输出端同轴固定,由电机二调控行进轮的转向。
48.本实施例中,所述抓地装置7包括:
49.固定座72,其中部转动安装有可被电机三71驱动旋转的旋套杆73,且所述旋套杆73内开设有下连通的十字柱腔74;
50.导向筒架76,其上端部通过复位弹簧75与固定座72相衔接,且所述导向筒架76下筒腔壁上开设有轴向的导向条缝77;
51.导向条板79,贯穿所述导向条缝77滑动连接,且所述导向条板79外端部固定有滑动座78,所述滑动座78还通过推杆715与螺套座56相衔接,所述推杆715中部还通过弹性杆一714与固定座72相衔接;以及
52.钻筒杆710,其包括有设置于外筒壁上的螺旋凸筋713、同轴固定于内筒腔中的且与十字柱腔74滑动连接的十字柱杆711以及内筒腔中预置的且可被旋套杆73嵌入的容置环
腔712,且钻筒竿710上端外筒壁与导向条板79内端头通过轴承连接;
53.需要注意的是,十字柱杆实时与十字柱腔轴向滑动连接,且旋套杆被电机三驱动旋转时,同步带动十字柱杆旋转,从而促使钻筒杆旋转,并再在推杆的配合下向行进路面内部移动钻进,进而完成钻筒杆与行进路面之间的嵌固,而再在通过电机三的反向驱动,以及推杆的配合下,从而完成钻筒杆与行进路面之间的脱离。
54.进一步的,所述导向筒架76下端头上安装有贴固罩717,所述贴固罩717外径端部与滑动座78通过弹性杆二716相衔接。
55.进一步的,所述贴固罩717为刚性结构,其内罩壁上开设有形变卡槽,所述形变卡槽的深度由外之内依次降低,从而提高钻筒杆钻入行进路面过程中的稳定性,进而降低旋套杆与十字柱杆之间出现偏离轴线的趋向应力强度。
56.进一步的,所述贴固罩717中部安装于用于清洁钻筒杆710的清洁绵。
57.本实施例中,所述衔接件2包括:
58.推进伸缩杆21,其两端端部分别与八字支架22两端端部相铰接,且所述八字支架22左右支杆的端部均为铰接连接结构;
59.衔接块,用于推进伸缩杆21与行进架体1之间的衔接,且所述衔接块包括有固定柱23、万向联轴器24;
60.需要注意的是,位于串连行进体头部的两组行进架体之间的推进伸缩杆的两端端部通过固定柱进行衔接,从而保证头部两组行进架体为直线一体结构,使得头部两组行进架体前侧行进架体中爪地装置复位时,由头部后侧行进架体作为头部前侧行进架体的支固点,进而促使头部前侧行进架体前进,而头部后侧行进架体作为行进方向的引导,且再由头部后侧行进架体后侧上的万向联轴器与推进伸缩杆可配合调控其下次待行进方向的引导,且通过万向联轴器的导向作用,使得蠕动行进过程中,呈折线蠕动,进而提高蠕动行进效率。
61.进一步的,还包括有:
62.智能处理模块;
63.视觉模块,用于识别外部环境图像,且外部环境图像至少包括有路径、障碍物;
64.三维扫描模块,用于扫描面向的障碍物坡面、行进路面,并反馈于智能处理模块中模拟绘制展障碍物坡面、行进路面,并对障碍物的坡面与水平面之间所夹的相对角度进行模拟计算,此中,相对角度设为α,并从障碍物坡面中选定与行进路面所夹α较小时的局部坡面作为行进路面;以及
65.压力感应模块,安装于行进轮63上,用于监测行进轮与行进路面存有的压力状况,并反馈于智能处理模块中,初始时,由压力感应模块监测中串连行进体水平对路面的压力值p,当行驶于障碍物坡面时,由压力感应模块实时监测串连行进体水平对路面的压力值p1,通过高频次的方式计算p1
×
cosα得出多组数据p2,其中,p2为竖直向下的分作用力,并取np作为抓地装置的启动判定时间,此中,0<n<1,本实施例中n取当时,则启动推进伸缩杆、抓地装置进行辅助跨越障碍物。
66.在具体实施时,其包括以下步骤:
67.s1:选取多组行进架体,并通过安装对应的固定柱、万向联轴器;
68.s2:将救援物资安装于行进架体上,并得出p值,进而得出值;
69.s3:启动串连行进体沿矿山面行进,直至时,启动抓地装置,进行蠕动前进,直至跨越障碍物。
70.以上所述,仅为发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。