1.本发明涉及自动控制技术领域,尤其是一种用于光伏板组清洗机器人的气动爬行驱动机构。
背景技术:
2.太阳能光伏发电站的太阳能光伏板组由于长期暴露在户外,使用过程中光伏板组上会落有很多灰尘,影响太阳光线的透射吸收,降低光伏板的光电转换效率,所以需要对光伏板组进行定期清洗。由于太阳能光伏板组一般长度都很长,清洗装置需要从板组的一端移动到另一端,现有清洗装置的移动多采用电机减速机的驱动方式,存在结构复杂且自重较大的缺点,安装使用不方便,影响清洗效率。
技术实现要素:
3.本发明要解决的技术问题是:为了克服现有技术中之不足,本发明提供一种结构轻便、可有效提高清洗效率的用于光伏板组清洗机器人的气动爬行驱动机构。
4.本发明解决其技术问题所采用的技术方案是:一种用于光伏板组清洗机器人的气动爬行驱动机构,包括可横贯光伏板组的导向轴,所述的导向轴上相距滑动设有自由滑块和负载滑块,所述的自由滑块上方安装有第一气缸,第一气缸的活塞杆侧设有第一杠杆,第一杠杆中部与自由滑块铰接,第一气缸的活塞杆与第一杠杆后端铰接而推动第一杠杆前端转动以实现自由滑块与导向轴之间的锁紧或脱开;所述的负载滑块上方安装有第二气缸,第二气缸的活塞杆侧设有第二杠杆,第二杠杆中部与负载滑块铰接,第二气缸的活塞杆与第二杠杆后端铰接而推动第二杠杆前端转动以实现负载滑块与导向轴之间的锁紧或脱开;所述的自由滑块与负载滑块之间设有爬行驱动气缸,所述的自由滑块锁紧时,爬行驱动气缸推动负载滑块向前移动,所述的负载滑块锁紧时,爬行驱动气缸推动自由滑块向前移动。
5.具体说,所述的自由滑块左侧固定有第一撑杆、右侧固定有第二撑杆,第一撑杆上端与第一杠杆中部铰接,第一气缸的固定端与第二撑杆上端铰接。
6.进一步地,所述的负载滑块的左侧固定有第三撑杆、右侧固定有第四撑杆,第二气缸的固定端与第三撑杆上端铰接,第四撑杆上端与第二杠杆中部铰接。
7.优选地,所述的爬行驱动气缸的活塞杆与第二撑杆中部铰接,爬行驱动气缸的固定端与第三撑杆中部铰接。
8.本发明的有益效果是:本发明中,当自由滑块与导向轴锁紧而负载滑块可以自由移动时,爬行驱动气缸伸出时就可以推动负载滑块向右移动;当自由滑块可以在导向轴上自由移动而负载滑块与导向轴锁紧时,爬行驱动气缸收回时就可以带动自由滑块向右移动,如此循环就可以完成自由滑块和负载滑块向右的爬行移动,反之则可以完成自由滑块和负载滑块向左的爬行移动,整体结构简单轻便,从而可有效地提高光伏板组的清洗效率。
附图说明
9.下面结合附图和实施例对本发明进一步说明。
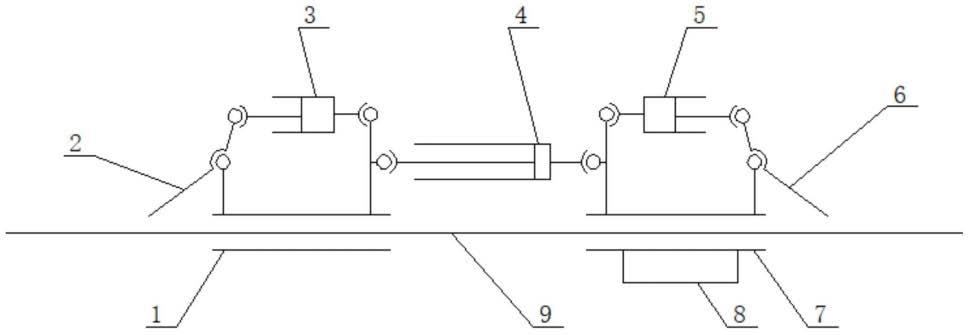
10.图1是本发明的结构原理示意图。
11.图2是本发明所述自由滑块与导向轴锁紧、负载滑块与导向轴脱开时的状态示意图。
12.图3是本发明所述爬行驱动气缸推动负载滑块移动时的状态示意图。
13.图4是本发明所述自由滑块与导向轴脱开、负载滑块与导向轴锁紧时的状态示意图。
14.图5是本发明所述爬行驱动气缸推动自由滑块移动时的状态示意图。
15.图中:1.自由滑块,2.第一杠杆,3.第一气缸,4.爬行驱动气缸,5.第二气缸,6.第二杠杆,7.负载滑块,8.负载,9.导向轴。
具体实施方式
16.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
17.如图1所示的一种用于光伏板组清洗机器人的气动爬行驱动机构,包括可横贯光伏板组的导向轴9,所述的导向轴9上相距滑动设有自由滑块1和负载滑块7,作为负载8的用于清洗光伏板组的清洗机器人安装在负载滑块7上。
18.所述的自由滑块1上方安装有第一气缸3,第一气缸3的活塞杆朝向左侧伸缩,所述的自由滑块1左侧固定有第一撑杆、右侧固定有第二撑杆,位于第一气缸3的活塞杆侧设有第一杠杆2,第一撑杆上端与第一杠杆2中部铰接,第一气缸3的固定端与第二撑杆上端铰接,第一气缸3的活塞杆与第一杠杆2后端铰接。随第一气缸3活塞杆伸缩推动第一杠杆2前端转动,第一杠杆2前端压紧或脱离导向轴9,从而实现自由滑块1与导向轴9之间的锁紧或脱开。
19.所述的负载滑块7上方安装有第二气缸5,第二气缸5的活塞杆朝向右侧伸缩,所述的负载滑块7的左侧固定有第三撑杆、右侧固定有第四撑杆,位于第二气缸5的活塞杆侧设有第二杠杆6,第二气缸5的固定端与第三撑杆上端铰接,第四撑杆上端与第二杠杆6中部铰接,第二气缸5的活塞杆与第二杠杆6后端铰接。随第二气缸5活塞杆伸缩推动第二杠杆6前端转动,第二杠杆6前端压紧或脱离导向轴9,从而实现负载滑块7与导向轴9之间的锁紧或脱开。
20.所述的自由滑块1与负载滑块7之间设有爬行驱动气缸4,其中爬行驱动气缸4的活塞杆与第二撑杆中部铰接,爬行驱动气缸4的固定端与第三撑杆中部铰接。
21.所述的自由滑块1锁紧时,爬行驱动气缸4推动负载滑块7向前移动,所述的负载滑块7锁紧时,爬行驱动气缸4推动自由滑块1向前移动。
22.本发明的爬行过程简述如下:
23.如图2所示,第一气缸3活塞杆伸出推动第一杠杆2逆时针转动,使第一杠杆2前端压住导向轴9而锁紧自由滑块1,第二气缸5的活塞杆收回拉动第二杠杆6逆时针转动,使第二杠杆6脱开导向轴9。
24.如图3所示,进而爬行驱动气缸4活塞杆推出,则推动负载滑块7带着负载8将沿着
导向轴9向右移动。
25.如图4所示,第一气缸3活塞杆收回拉动第一杠杆2顺时针转动,使第一杠杆2前端脱离导向轴9,第二气缸5的活塞杆伸出推动第二杠杆6顺时针转动,使第二杠杆6压住导向轴9而锁紧负载滑块7。
26.如图5所示,进而爬行驱动气缸4活塞杆收回,此时负载滑块7和负载8不动,爬行驱动气缸4拉动自由滑块1沿着导向轴9向右移动,至此完成了负载8向右一步的驱动过程。
27.按上述过程循环就可以完成自由滑块1和负载滑块7向右的爬行移动,从而实现负载8沿导向轴9的向右的移动过程。
28.相反,按照图5至图2依次顺序动作,则可以完成自由滑块1和负载滑块7向左的爬行移动,从而实现负载8沿导向轴9的向左的移动过程。
29.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
技术特征:
1.一种用于光伏板组清洗机器人的气动爬行驱动机构,包括可横贯光伏板组的导向轴,其特征是:所述的导向轴上相距滑动设有自由滑块和负载滑块,所述的自由滑块上方安装有第一气缸,第一气缸的活塞杆侧设有第一杠杆,第一杠杆中部与自由滑块铰接,第一气缸的活塞杆与第一杠杆后端铰接而推动第一杠杆前端转动以实现自由滑块与导向轴之间的锁紧或脱开;所述的负载滑块上方安装有第二气缸,第二气缸的活塞杆侧设有第二杠杆,第二杠杆中部与负载滑块铰接,第二气缸的活塞杆与第二杠杆后端铰接而推动第二杠杆前端转动以实现负载滑块与导向轴之间的锁紧或脱开;所述的自由滑块与负载滑块之间设有爬行驱动气缸,所述的自由滑块锁紧时,爬行驱动气缸推动负载滑块向前移动,所述的负载滑块锁紧时,爬行驱动气缸推动自由滑块向前移动。2.如权利要求1所述的用于光伏板组清洗机器人的气动爬行驱动机构,其特征是:所述的自由滑块左侧固定有第一撑杆、右侧固定有第二撑杆,第一撑杆上端与第一杠杆中部铰接,第一气缸的固定端与第二撑杆上端铰接。3.如权利要求2所述的用于光伏板组清洗机器人的气动爬行驱动机构,其特征是:所述的负载滑块的左侧固定有第三撑杆、右侧固定有第四撑杆,第二气缸的固定端与第三撑杆上端铰接,第四撑杆上端与第二杠杆中部铰接。4.如权利要求3所述的用于光伏板组清洗机器人的气动爬行驱动机构,其特征是:所述的爬行驱动气缸的活塞杆与第二撑杆中部铰接,爬行驱动气缸的固定端与第三撑杆中部铰接。
技术总结
本发明涉及一种用于光伏板组清洗机器人的气动爬行驱动机构,包括导向轴,导向轴上滑动设有自由滑块和负载滑块,自由滑块上方设有第一气缸,第一气缸活塞杆侧设有第一杠杆,第一杠杆中部与自由滑块铰接,第一气缸活塞杆与第一杠杆后端铰接实现自由滑块与导向轴的锁紧或脱开;负载滑块上方设有第二气缸,第二气缸活塞杆侧设有第二杠杆,第二杠杆中部与负载滑块铰接,第二气缸活塞杆与第二杠杆后端铰接实现负载滑块与导向轴的锁紧或脱开;自由滑块与负载滑块之间设有爬行驱动气缸,自由滑块锁紧时,爬行驱动气缸推动负载滑块向前移动,负载滑块锁紧时,爬行驱动气缸推动自由滑块向前移动。本发明结构轻便,可有效提高光伏板组的清洗效率。清洗效率。清洗效率。
技术研发人员:俞竹青 李明亮
受保护的技术使用者:常州大学
技术研发日:2022.06.14
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。