1.本发明属于自动导引小车技术领域,具体涉及自动导引小车。
背景技术:
2.随着智能化、自动化的到来,仓库的搬运也进入了无人化的时代。近年来,自动导引车(搬运机器人)的使用成为装备制造业生产环节物流方案中的亮点,对提高企业生产效率、降低成本、提高产品质量和管理水平起到了一定的作用。
3.搬运机器人(automated guided vehicle),即无人驾驶(driverless)的运输车,是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。一般可透过电脑来控制其行进路线以及行为,或利用电磁轨道来设立其行进路线,电磁轨道黏贴於地板上,无人搬运车则依循电磁轨道所带来的讯息进行移动与动作。在计算机监控下,按路径规划和作业要求,精确地行走并停靠到指定地点,完成一系列作业功能。在这些自动化物流系统中,有能够自由行走而且具备抬升功能机器人,将汽车运输到合适的位置上,实现自动化仓储。
4.目前移动机器人有两种最主要的运行方法,一是差速舵轮运行方法;一是麦克纳姆轮运行方法,这两种方法都是采用轮子滚动式运行。差速舵轮通过两轮的差速实现agv的前后、左右运行。麦克纳姆轮通过小滚轮组成的轮子实现前后左右运行。
5.然而,这两种机器人的运行方法都有自己的缺陷:(1)差速轮,受到载荷和结构尺寸的限制,差速轮不能做的很小,而且差速轮一般为带转向功能的舵轮,转向驱动电机和齿轮结构一般设于舵轮的上侧,导致舵轮的整体结构一般较高,在一些低矮的托盘无法从底部进入。在重载的场合,为了实现大负载的运输功能,差速轮必须做的很大。(2)麦克纳姆轮,它是与地面点接触,与地面的接触面积相对较小,在相同载荷的情况下,其承受地面的单位压强要比其它轮子要大,这种形式注定其载荷不可能最的很大,难以满足在低矮货架和重载低高度场合运行要求,载荷5吨时,轮子的直径要做到0.7米。无法实现在很小的轮径下,满足大载荷的需求。
6.现有的移动机器人的运行方法,限制了机器人在低矮货架和重载低高度要求的场合中的应用。
技术实现要素:
7.本发明的目的在于克服现有的自动导引小车难以满足低矮货架和重载低高度要求的场合运行的问题,提供一种适用于低矮货架和重载低高度要求场合的自动导引小车。
8.为了达到上述目的,本发明的采用以下技术方案:
9.自动导引小车,包括车体和设于车体上的多个盘式驱动轮装置,所述盘式驱动轮装置包括转盘、多个轮组、行星传动机构和回转驱动机构;转盘旋转连接在所述车体上;多个轮组,环向布置在转盘底部,各轮组与转盘相对旋转连接;行星传动机构,分别与转盘和
各轮组传动连接,使转盘相对旋转时带动各轮组同步转动;回转驱动机构,用于驱动转盘进行回转运动。
10.与现有技术相比,本发明的自动导引小车,各盘式驱动轮装置通过回转驱动机构以预设的方向驱动各轮组绕转盘的轴线公转同时,各轮组绕各自的轴线自转,从而依靠各盘式驱动轮装置的运转方向和速度,最终合成在任意要求的方向上产生一个合力矢量从而保证了这个车体在最终的合力矢量的方向上能在不改变车体自身的方自由地移动,以及实现自转转向;通过多个盘式驱动轮装置进行组合,可以灵活方便的实现全方位移动功能。而且各盘式驱动轮装置包括多个轮组,使其承受的压力分散至各轮组,便于轮组的尺寸可以做的更小,满足车体在低矮货架和重载低高度要求的场合中应用。
11.进一步的,所述行星传动机构包括第一传动件、设于转盘中心的固定轮以及分别与各轮组连接的转轮,所述第一传动件分别绕设在固定轮和各转轮上,所述第一传动件为皮带或链条;通过这样设置,行星传动机构设置方式简单,转盘转动时联动各轮组同步转动效果好。
12.进一步的,行星传动机构还包括设于相邻连续绕设有第一传动件的转轮之间的张紧轮,所述第一传动件同时绕设在张紧轮上;通过这样设置,有效增大第一传动件与各转轮绕设的接触面积,联动效果更好。
13.进一步的,所述盘式驱动轮装置设置至少两个;例如,所述盘式驱动轮装置设置两个,两个盘式驱动轮装置分别对称设置在所述车体的两侧;或者,所述盘式驱动轮装置设置三个,三个盘式驱动轮装置分别设置在所述车体的底部;或者,所述盘式驱动轮装置设置四个,四个盘式驱动轮装置分别设置在所述车体的底部。
14.进一步的,所述轮组包括至少两个旋转对称布置的脚轮;例如,所述轮组包括两个对称布置的脚轮;或者,所述轮组包括三个旋转对称布置的脚轮;或者,所述轮组包括四个旋转对称布置的脚轮。
15.进一步的,所述轮组至少设有两个,并且以旋转对称的方式布置;例如,所述轮组设有两个,并且对称地设于所述转盘底部;或者,所述轮组设有三个,并且旋转对称地设于所述转盘底部;或者,所述轮组设有四个,并且旋转对称地设于所述转盘底部。
16.进一步的,所述回转驱动机构包括回转驱动电机,输出驱动轮和第二传动件,所述输出驱动轮与所述回转驱动电机传动连接,输出驱动轮通过第二传动件与所述转盘传动连接;通过这样设置,回转驱动机构设于转盘的侧部,可以实现车体在更低离地高度的行驶。
附图说明
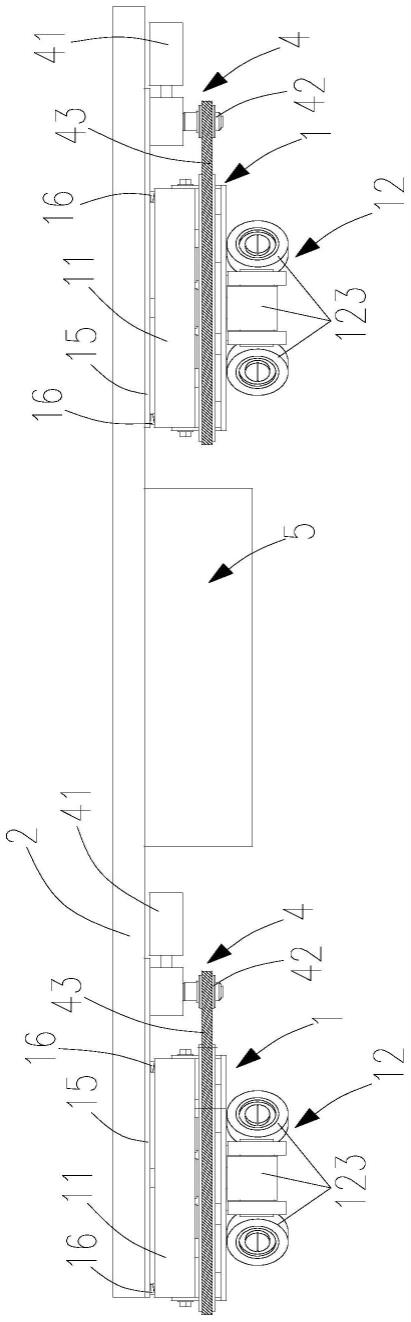
17.图1为自动导引小车的示意图
18.图2为盘式驱动轮装置的示意图
19.图3为回转驱动机构和行星传动机构的示意图
20.图4为行星传动机构的示意图
21.图5为多个轮组的示意图
22.图6为行星传动机构与多个轮组的示意图
23.图7为盘式驱动轮装置的剖视图
24.图8为轮组的结构示意图
25.图9为具有四个盘式驱动轮装置的车体沿前进方向行驶的工作原理图
26.图10为具有四个盘式驱动轮装置的车体沿后退方向平移行驶的工作原理图
27.图11为具有四个盘式驱动轮装置的车体沿左侧方向平移行驶的工作原理图
28.图12为具有四个盘式驱动轮装置的车体沿右侧方向行驶的工作原理图
29.图13为具有四个盘式驱动轮装置的车体沿顺时针方向回转行驶的工作原理图
30.图14为具有四个盘式驱动轮装置的车体沿逆时针方向回转行驶的工作原理图
31.图15为具有四个盘式驱动轮装置的车体沿顺时针方向回转45度的工作原理图
32.图16为具有四个盘式驱动轮装置的车体沿逆时针方向回转45度的工作原理图
33.图17为具有四个盘式驱动轮装置的车体沿顺时针方向回转135度的工作原理图
34.图18为具有四个盘式驱动轮装置的车体沿逆时针方向回转135度的工作原理图
35.图19为具有四个盘式驱动轮装置的车体沿右前方45度方向平移的工作原理图
36.图20为具有四个盘式驱动轮装置的车体沿左前方45度方向平移的工作原理图
37.图21为具有四个盘式驱动轮装置的车体沿右后方45度方向平移的工作原理图
38.图22为具有四个盘式驱动轮装置的车体沿左后方45度方向平移的工作原理图
39.图23为具有三个盘式驱动轮装置的车体沿前进方向行驶的工作原理图
40.图24为具有三个盘式驱动轮装置的车体沿后退方向平移行驶的工作原理图
41.图25为具有三个盘式驱动轮装置的车体沿左侧方向平移行驶的工作原理图
42.图26为具有三个盘式驱动轮装置的车体沿右侧方向行驶的工作原理图
43.图27为具有两个盘式驱动轮装置的车体沿前进方向行驶的工作原理图
44.图28为具有两个盘式驱动轮装置的车体沿后退方向平移行驶的工作原理图
45.图29为具有两个盘式驱动轮装置的车体沿左侧方向平移行驶的工作原理图
46.图30为具有两个盘式驱动轮装置的车体沿右侧方向行驶的工作原理图
47.图31为具有两个盘式驱动轮装置的车体沿顺时针方向回转行驶的工作原理图
48.图32为具有两个盘式驱动轮装置的车体沿逆时针方向回转行驶的工作原理图
具体实施方式
49.以下结合附图说明本发明的技术方案:
50.参见图1至图32,本发明的自动导引小车,包括车体2、设于车体2底部的多个盘式驱动轮装置1和控制模块5,所述控制模块5分别与多个盘式驱动轮装置1电连接,所述盘式驱动轮装置1包括转盘11、多个轮组12、行星传动机构3和回转驱动机构4;转盘11旋转连接在所述车体2上;多个轮组12环向布置在转盘11底部,各轮组12与转盘11相对旋转连接;行星传动机构3分别与转盘11和各轮组12传动连接,使转盘11相对旋转时带动各轮组12沿同一方向同步转动;回转驱动机构4用于驱动转盘11进行回转运动。
51.与现有技术相比,本发明的自动导引小车,各盘式驱动轮装置1通过回转驱动机构4以预设的方向驱动各轮组12绕转盘11的轴线公转同时,各轮组12绕各自的轴线自转,从而依靠各盘式驱动轮装置1的运转方向和速度,最终合成在任意要求的方向上产生一个合力矢量从而保证车体2在最终的合力矢量的方向上能在不改变车体2自身的方自由地移动以及实现自转转向;通过多个盘式驱动轮装置1进行组合,可以灵活方便的实现全方位移动功能。而且各盘式驱动轮装置1包括多个轮组12,使其承受的压力分散至各轮组12,便于轮组
12的尺寸可以做的更小,满足车体2在低矮货架和重载低高度要求的场合中应用。
52.参见图2至图8,在一种实施例中,所述行星传动机构3包括第一传动件31、设于转盘11中心的固定轮31以及分别与各轮组12连接的转轮32,各轮组12连接有转轴121,所述转轴121通过连接轴承122可转动连接在所述转盘11上,所述转轮32固定连接在所述转轴121上,所述第一传动件31分别绕设在固定轮31和各转轮32上,使转盘11相对旋转时带动各轮组12沿转盘11的反方向或反方向同步转动;通过这样设置,行星传动机构3设置方式简单,转盘11转动时联动各轮组12同步转动效果好。
53.参见图3、图4和图7,在一种实施例中,行星传动机构3还包括设于相邻连续绕设有第一传动件31的转轮32之间的张紧轮33,所述第一传动件31同时绕设在张紧轮33上;通过这样设置,有效增大第一传动件31与各转轮32绕设的接触面积,联动效果更好。
54.参见图1至图8在进一步的实施例中,所述转盘11内设有上侧开口的装配腔111,所述转轮32、第一传动件31、固定轮31和的张紧轮33分别安装在所述装配腔111内,还包括用于盖合所述转盘11的装配腔111的上盖15,所述上盖15连接在所述车体2底部,所述固定轮31通过固定件36不可转动地连接在上盖15中心位置的底部,所述转盘11顶部边沿通过多个回转轴承16与所述上盖15底部连接,从而所述转盘11可相对上盖15回转转动,并且在转盘11转动时,通过固定轮31的自转带动所述第一传动件31运转,从而第一传动件31带动各轮组12沿同一方向同步转动。
55.参见图2至图7,在进一步的实施例中,所述第一传动件31为皮带,所述转轮32、固定轮31和张紧轮33对应采用皮带轮。
56.在进一步替换的实施例中(图未示),所述第一传动件31为链条,所述转轮32、固定轮31和张紧轮33对应采用链轮。
57.参见图23至图26,在一种实施例中,所述盘式驱动轮装置1设置至少两个。
58.在进一步的实施例中,所述盘式驱动轮装置1设置两个,两个盘式驱动轮装置1可以分别设置在所述车体2的前后两侧或者左右两侧,或者是布置在靠近车体2左侧(或右侧、或中部)的前后两侧,或者是布置在靠近车体2前侧(或后侧、或中部)的左右两侧,为了进一步提高车体2的平衡稳定性,可以在车体2底部增加若干万向轮辅助行驶。
59.参见图23至图26,以下举例说明所述车体2设有两个盘式驱动轮装置1时的工作方式,例如,两个盘式驱动轮装置1包括分别设置在所述车体2前侧的左右两侧的盘式驱动轮装置a和盘式驱动轮装置b时,所述车体2运行时包括以下多种行驶状态:
60.(1)参见图23,车体2在前进时,通过驱动盘式驱动轮装置a的多个轮组12沿逆时针方向旋转以及驱动驱动盘式驱动轮装置b的多个轮组12沿顺时针方向旋转,即可实现车体2沿前方行进。
61.(2)参见图24,车体2在后退时,通过驱动盘式驱动轮装置a的多个轮组12沿顺时针方向旋转以及驱动盘式驱动轮装置b的多个轮组12沿逆时针方向旋转,即可实现车体2沿前方行进。
62.(3)参见图25,车体2向左侧平移时,通过驱动盘式驱动轮装置a和盘式驱动轮装置b的多个轮组12沿顺时针方向旋转,即可实现车体2沿左侧方向行进。
63.(4)参见图26,车体2向右侧平移时,通过驱动盘式驱动轮装置a和盘式驱动轮装置b的多个轮组12沿逆时针方向旋转,即可实现车体2沿右侧方向行进。
64.或者,参见图27至图32,在进一步的实施例中,所述盘式驱动轮装置1设置三个,三个盘式驱动轮装置1分别设置在所述车体2的底部,例如在车体2前侧设置两个,在车体2后侧设置一个,或者在车体2前侧设置一个,在车体2后侧设置两个,或者在车体2左侧设置一个,在车体2右侧设置两个,或者在车体2左侧设置两个,在车体2右侧设置一个;为了进一步提高车体2的平衡稳定性,可以在车体2底部增加若干万向轮辅助行驶,例如,在车体2前方左右两侧以及后方左侧各设置一个盘式驱动轮装置1,在车体2后方右侧设置一个万向轮。
65.以下举例说明所述车体2设有三个盘式驱动轮装置1时的工作方式,例如,三个盘式驱动轮装置1包括分别设置在所述前方左右两侧以及后方左侧的两个盘式驱动轮装置a和盘式驱动轮装置b以及设于车体2后侧的一个盘式驱动轮装置c,在车体2后方右侧设置一个万向轮,所述车体2运行时包括以下多种行驶状态:
66.(1)参见图27,车体2在前进时,通过驱动盘式驱动轮装置a和盘式驱动轮装置c的多个轮组12沿逆时针方向旋转以及驱动驱动盘式驱动轮装置b的多个轮组12沿顺时针方向旋转,即可实现车体2沿前方行进。
67.(2)参见图28,车体2在后退时,通过驱动盘式驱动轮装置a和盘式驱动轮装置c的多个轮组12沿顺时针方向旋转以及驱动盘式驱动轮装置b的多个轮组12沿逆时针方向旋转,即可实现车体2沿前方行进。
68.(3)参见图29,车体2向左侧平移时,通过驱动盘式驱动轮装置a和盘式驱动轮装置b的多个轮组12沿顺时针方向旋转以及驱动驱动盘式驱动轮装置c的多个轮组12沿逆时针方向旋转,即可实现车体2沿左侧方向行进。
69.(4)参见图30,车体2向右侧平移时,通过驱动盘式驱动轮装置a和盘式驱动轮装置b的多个轮组12沿逆时针方向旋转以及驱动驱动盘式驱动轮装置c的多个轮组12沿顺时针方向旋转,即可实现车体2沿右侧方向行进。
70.(5)参见图31,车体2顺时针自转时,通过驱动盘式驱动轮装置a、盘式驱动轮装置b和盘式驱动轮装置c的多个轮组12沿逆时针方向旋转,即可实现车体2沿顺时针方向进行自转。
71.(6)参见图32,车体2逆时针自转时,通过驱动盘式驱动轮装置a、盘式驱动轮装置b和盘式驱动轮装置c的多个轮组12沿顺时针方向旋转,即可实现车体2沿逆时针方向进行自转。
72.参见图9至图22,在本实施例中,所述盘式驱动轮装置1设置四个,四个盘式驱动轮装置1分别设置在所述车体2的底部,例如在车体2前侧设置两个,在车体2后侧设置两个。
73.以下举例说明所述车体2设有四个盘式驱动轮装置1时的工作方式,例如,四个盘式驱动轮装置1包括分别设置在所述车体2前侧左右布置的两个盘式驱动轮装置a和盘式驱动轮装置b以及设于车体2后侧左右布置的两个盘式驱动轮装置c和盘式驱动轮装置d,所述车体2运行时包括以下多种行驶状态:
74.(1)参见图9,车体2在前进时,通过驱动盘式驱动轮装置a和驱动盘式驱动轮装置c的多个轮组12沿逆时针方向旋转以及驱动驱动盘式驱动轮装置b和盘式驱动轮装置d的多个轮组12沿顺时针方向旋转,即可实现车体2沿前方行进。
75.(2)参见图10,车体2在后退时,通过驱动盘式驱动轮装置a和驱动盘式驱动轮装置c的多个轮组12沿顺时针方向旋转以及驱动盘式驱动轮装置b和盘式驱动轮装置d的多个轮
组12沿逆时针方向旋转,即可实现车体2沿前方行进。
76.(3)参见图11,车体2向左侧平移时,通过驱动盘式驱动轮装置a和盘式驱动轮装置b的多个轮组12沿顺时针方向旋转以及驱动盘式驱动轮装置c和盘式驱动轮装置d的多个轮组12沿逆时针方向旋转,即可实现车体2沿左侧方向行进。
77.(4)参见图12,车体2向右侧平移时,通过驱动盘式驱动轮装置a和盘式驱动轮装置b的多个轮组12沿逆时针方向旋转以及驱动盘式驱动轮装置c和盘式驱动轮装置d的多个轮组12沿顺时针方向旋转,即可实现车体2沿右侧方向行进。
78.(5)参见图13,车体2顺时针自转时,通过驱动盘式驱动轮装置a、盘式驱动轮装置b、盘式驱动轮装置c和盘式驱动轮装置d的多个轮组12沿逆时针方向旋转,即可实现车体2整体沿顺时针方向进行自转。
79.(6)参见图14,车体2逆时针自转时,通过驱动盘式驱动轮装置a、盘式驱动轮装置b、盘式驱动轮装置c和盘式驱动轮装置d的多个轮组12沿顺时针方向旋转,即可实现车体2沿逆时针方向进行自转。
80.(7)参见图15,车体2顺时针自转45度,通过驱动盘式驱动轮装置a多个轮组12沿逆时针方向旋转,以及驱动盘式驱动轮装置d的多个轮组12沿顺时针方向旋转,即可实现车体2整体沿顺时针方向自转45度。
81.(8)参见图16,车体2逆时针自转45度,通过驱动盘式驱动轮装置b的多个轮组12沿顺时针方向旋转,以及驱动盘式驱动轮装置c的多个轮组12沿逆时针方向旋转,即可实现车体2整体沿逆时针方向自转45度。
82.(9)参见图17,车体2顺时针自转135度,通过驱动盘式驱动轮装置b多个轮组12沿逆时针方向旋转,以及驱动盘式驱动轮装置c的多个轮组12沿顺时针方向旋转,即可实现车体2整体沿顺时针方向自转135度。
83.(10)参见图18,车体2逆时针自转135度,通过驱动盘式驱动轮装置a多个轮组12沿顺时针方向旋转,以及驱动盘式驱动轮装置d的多个轮组12沿逆时针方向旋转,即可实现车体2整体沿逆时针方向自转135度。
84.(11)参见图19,车体2沿右前方45度方向平移,通过驱动盘式驱动轮装置a多个轮组12沿顺时针方向旋转,以及驱动盘式驱动轮装置b、盘式驱动轮装置c以及盘式驱动轮装置d的多个轮组12沿逆时针方向旋转,即可实现车体2整体沿前右方45度方向平移。
85.(12)参见图20,车体2沿左前方45度方向平移,通过驱动盘式驱动轮装置c多个轮组12沿顺时针方向旋转,以及驱动盘式驱动轮装置a、盘式驱动轮装置b以及盘式驱动轮装置d的多个轮组12沿逆时针方向旋转,即可实现车体2整体沿前右方45度方向平移。
86.(13)参见图21,车体2沿右后方45度方向平移,通过驱动盘式驱动轮装置b多个轮组12沿顺时针方向旋转,以及驱动盘式驱动轮装置a、盘式驱动轮装置c以及盘式驱动轮装置d的多个轮组12沿逆时针方向旋转,即可实现车体2整体沿右后方45度方向平移。
87.(14)参见图22,车体2沿左后方45度方向平移,通过驱动盘式驱动轮装置d多个轮组12沿顺时针方向旋转,以及驱动盘式驱动轮装置a、盘式驱动轮装置b以及盘式驱动轮装置c的多个轮组12沿逆时针方向旋转,即可实现车体2整体沿左后方45度方向平移。
88.参见图3至图8,在一种实施例中,所述轮组12至少设有两个,并且以旋转对称的方式布置;通过这样设置,通过增加轮组12数量,提高各盘式驱动轮装置1的承载能力,便于车
体2可以实现更低高度的负载行进。
89.参见图3至图8,在本实施例中,所述轮组12设有三个,并且旋转对称地设于所述转盘11底部。
90.或者,在进一步的替换实施例中(图未示),所述轮组12设有两个,并且对称地设于所述转盘11底部。
91.或者,在进一步的替换实施例中(图未示),所述轮组12设有四个,并且旋转对称地设于所述转盘11底部。
92.参见图3至图8,在一种实施例中,所述轮组12包括至少两个旋转对称布置的脚轮123,各脚轮123可绕其水平轴线自由转动。
93.参见图3至图8,在本实施例中,所述轮组12包括两个对称布置的脚轮123。
94.或者,在进一步的实施例中(图未示),所述轮组12包括三个旋转对称布置的脚轮123。
95.或者(图未示),在进一步的替换实施例中,所述轮组12包括四个旋转对称布置的脚轮123。
96.参见图1至图3,在一种实施例中,所述回转驱动机构4包括回转驱动电机41,输出驱动轮42和第二传动件43,所述输出驱动轮42与所述回转驱动电机41传动连接,输出驱动轮42通过第二传动件43与所述转盘11传动连接,所述第二传动件43分别绕设在输出驱动轮42和转盘11的外侧;通过这样设置,回转驱动机构4设于转盘11的侧部,可以实现车体2在更低离地高度的行驶。
97.参见图1至图3,在进一步的实施例中,所述第二传动件43为皮带,所述输出驱动轮42对应采用皮带轮,所述第二传动件43分别绕设在输出驱动轮42和转盘11的外侧实现两者间的传动连接。
98.在进一步替换的实施例中(图未示),所述第二传动件43为链条,所述输出驱动轮42对应采用链轮,所述第二传动件43分别绕设在输出驱动轮42和转盘11的外侧实现两者间的传动连接。
99.根据上述说明书的揭示和教导,本发明所属领域的技术人员还可以对上述实施方式进行变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。