1.本发明总体上涉及经食管超声心动图(“tee”)探头。本发明具体涉及介入手术期间tee探头的机器人致动。
背景技术:
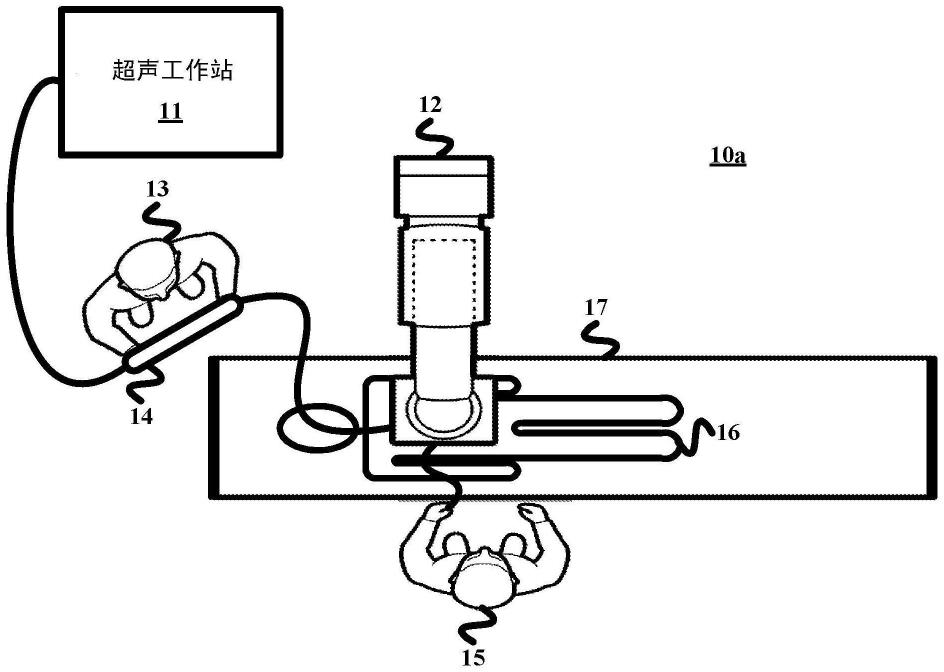
2.经食管超声心动图通常用于在结构性心脏病(“shd”)的治疗期间使心脏解剖结构和介入装置可视化。图1示出了具有超声工作站11和x射线扫描器的实验室10a内的工作人员的典型分布,其中示出了x射线扫描器的c形臂12。在shd手术期间,超声心动图人员13保持tee探头14,tee探头14穿过患者16的口腔进入食管以使患者16的心脏可视化。心脏病专家15位于x射线c形臂12和手术台17的相反侧。心脏病专家15经由tee探头14在x射线引导和超声引导下操纵介入装置(未示出)(例如,导管和导丝)从动脉切口进入心脏,以便执行不同的诊断或治疗手术。示例性手术,诸如二尖瓣夹的布放或经导管主动脉瓣置换术(“tavr”),会是耗时且复杂的。而且,确保在手术期间目标解剖结构的适当可视化是超声心动图人员13的职责,其必须在手术持续期间对tee探头14的末端的位置做出持续的微调。
3.在实践中,图1的操作条件呈现出许多挑战。第一个挑战是微弱和较差的可视化。具体而言,适当的可视化包括确保相关的解剖结构位于视场内,以及实现换能器头部和食管壁之间的必需的接触力,以实现充分的声学耦合。为此,tee探头14的头部的位置和取向需要在手术期间有持续的微调,以便保持目标结构的适当可视化。在长的手术期间这可能由于超声心动图人员13而导致微弱且较差的可视化。
4.第二个挑战是x射线曝光。具体而言,tee探头14的长度导致超声心动图人员13的位置紧靠介入x射线系统的射线源,因此在整个手术过程中超声心动图人员13的x射线曝光最大。
5.第三个挑战是通信和可视化。在手术的某些阶段,心脏病专家15和超声心动图人员13必须不间断沟通,因为心脏病专家15指示超声心动图人员13来可视化哪个结构。考虑到解读3d超声体积的难度,以及由x射线和超声系统显示的不同坐标系,对于超声心动图人员13来说理解心脏病专家15的意图是具有挑战性的。
技术实现要素:
6.本发明提供了一种机器人致动系统来解决这些挑战。通常,如图2中所示,实验室10b内工作人员的一种新的分布,其中机器人致动器系统利用用于tee探头14的二(2)自由度和四(4)自由度之间远程控制的机器人工作站20和机器人致动器30,其调节tee探头14的超声成像体积。另外,如将在本文进一步描述的,机器人致动器30可具有针对现有的和各种类型的tee探头14进行改造的能力,并且可具有在超声心动图人员13出于任意原因决定返回tee探头14的手动操作时快速从tee探头14移除的能力。
7.本发明的一种形式是一种机器人致动器,所述机器人致动器用于控制介入工具手柄(例如,探头手柄)的一个或多个致动拨盘。所述机器人致动器包含用以限定致动腔室的
手柄基座和手柄盖的联接,所述致动腔室用于容纳所述介入工具手柄的致动拨盘和在所述致动腔室内的一个或多个机动化的齿轮,所述机动化的齿轮能操作以接合在所述致动腔室内的所述介入工具手柄的所述致动拨盘。
8.所述机器人致动器还可采用致动器平台,所述致动器平台用于控制所述介入工具手柄的横向和/或旋转运动。
9.本发明的第二种形式是一种机器人致动系统,所述机器人致动系统采用机器人工作站和前述用于控制介入工具手柄的一个或多个致动拨盘的机器人致动器。在操作中,所述机器人工作站产生马达指令,所述马达指令用于控制所述介入工具手柄的致动拨盘,且所述机器人致动器响应于由所述机器人工作站产生的所述马达指令来控制所述介入工具手柄的所述致动拨盘。为此,所述机动化的齿轮可操作地连接到所述机器人工作站以控制所述介入工具手柄的所述致动拨盘。
10.通过结合附图阅读下面详细描述的本发明的各个实施例,本发明的前述形式和其他形式以及本发明的各种特征和优点将变得更加显而易见。详细描述和附图仅是本发明的示例而非限制,本发明的范围将由所附权利要求及其等同物来限定。
附图说明
11.图1示出了本领域已知的tee探头的示例性手动致动。
12.图2示出了根据本发明的tee探头的远程控制致动的示例性实施例。
13.图3示出了本领域已知的示例性tee探头。
14.图4a和4b示出了根据本发明的图3中所示的tee探头的致动拨盘和机动化的齿轮的示例性接合。
15.图5示出了根据本发明的机器人致动器的示例性实施例。
16.图6a和6b分别示出了根据本发明的探头手柄基座和探头手柄盖的示例性实施例。
17.图7示出了根据本发明的在图6a和图6b中所示的探头手柄基座和探头手柄盖的示意性实施例。
18.图8a和8b示出了根据本发明的致动器平台的示例性实施例。
19.图9a-9d示出了图8a和8b中所示的致动器平台的操作。
具体实施方式
20.为了有利于理解本发明,现在将在如图3中所示的tee探头的远程控制致动情境中描述本发明的机器人致动系统的示例性实施例以及其各部件。通过这些描述,本领域普通技术人员将意识到如何将本发明的机器人致动系统的原理应用到用于任何类型手术的超声探头的任何适当设计以及其他柔索传动(tendon driven)的柔性装置(例如,结肠镜、胃镜等)。
21.参照图3,本领域公知的tee探头40采用手柄41和细长探头,所述细长探头具有附接至手柄41的近端42p和具有超声换能器43的远侧头端42d。tee探头40采用偏航致动拨盘43(用于调节探头头部42d的偏航自由度),和俯仰致动拨盘44(用于调节探头头部42的俯仰自由度)。
22.本发明提供了齿轮,所述齿轮被机动化以控制偏航致动拨盘43和俯仰致动拨盘44
的致动。例如,如图4a中所示,本发明的摩擦齿轮31被设计用于摩擦地接合偏航致动拨盘43,以传递足够的用于控制偏航致动拨盘43的转动的扭矩。通过另一示例,如图4b中所示,本发明的冠状齿轮32设计用于机械地接合俯仰致动拨盘44,且不接触偏航致动拨盘43,用于控制俯仰致动拨盘44的旋转。
23.虽然在实践中机器人致动器30(图2)的齿轮的设计将取决于打算接合的探头的对应致动拨盘的设计,但在本文中将在齿轮31和32的情境中描述机器人致动器30的实施例。
24.参照图5,机器人致动器30的一个实施例采用具有凹进的内表面33a的探头手柄盖33和具有凹进的内表面33b的探头手柄基座34,以便在经由一个或多个磁性联接器37而磁性地联接时限定致动腔室。在操作中,所述腔室容纳探头的致动拨盘,且磁性联接提供了在必要时(尤其是在操作环境指定探头的手动控制时)利于容易地移除探头的优点。
25.机器人致动器30还针对每个齿轮31和32采用马达35和马达控制器36(“马达控制器”),形成经由机器人工作站20到马达控制器36的电联接而能受机器人工作站20(图2)控制的机动化的齿轮。在操作中,所述机动化的齿轮充分地接合并旋转探头的致动拨盘,这有利于探头手柄盖33的轻量化设计。
26.另外,根据机器人致动器30正在操作的环境(例如,手术室),可利用本领域公知的探头手柄基座34和/或致动器平台38来将机器人致动器30固定至所述环境内的参照系。例如,探头手柄基座34和/或致动器平台38可安装至固定装置、手术台、手术设备、或用于将机器人致动器30固定至手术室内的参照系的其他任意物体。
27.参照图6a和6b,机器人致动器30的示意性实施例采用探头手柄基座50和探头手柄盖60,以控制探头的致动拨盘(例如,如所示的探头手柄41)。具体而言,探头手柄盖50具有凹进的内表面51,且探头手柄基座60具有凹进的内表面61,以在经由探头手柄基座50的磁性52a与探头手柄盖60的钢质定位销62b而磁性地联接时限定致动腔室。
28.探头手柄基座50采用电连接到机器人工作站20(图2)的马达控制板53,且探头手柄盖60采用电连接到马达64(例如,经由两个(2)正齿轮的有刷dc马达)的马达控制板63。马达控制板53和63具有电触点(未示出)(例如,弹簧触点),它们在探头手柄基座50和探头手柄盖60磁性联接时接合以形成马达控制器。马达控制器53a/63a实施马达64a对冠状齿轮65的当前控制,进而控制冠状齿轮65的旋转。类似地,马达控制器53b/63b实施马达64b对与冠状齿轮65同心的摩擦齿轮66的当前控制,进而控制摩擦齿轮66的旋转。
29.图7示出了机器人致动器130的美学实施图,所述机器人致动器具有探头手柄基座150和探头手柄盖160的磁性联接,以便容纳和控制探头手柄141的致动拨盘(未示出)。
30.图8a和8b示出了致动器平台38(图5)的一个实施例70,所述致动器平台采用一对导轨71、一对滑块72、一对旋转马达73、以及曲轴75。通过本领域公知的技术,滑块72可滑动地联接至导轨71并附贴至旋转马达73,且曲轴75可旋转地联接至旋转马达73。在操作中,平台控制器76采用硬件、软件、固件和/或电路,以便经由滑块72沿导轨71在箭头方向中一个方向上滑动的常规控制来横向地移动曲轴75,以及经由旋转马达73的控制(例如,如图8b中所示的180
°
旋转)而使曲轴75绕旋转轴线ra旋转。在实施中,旋转马达73可具有沟槽74,所述沟槽用于支撑探头手柄、探头自身、和/或探头线缆的一部分。
31.曲轴75的重要性是在曲轴75如图9a和9b中箭头所例示的横向移动时,维持探头手柄与旋转轴线ra的旋转对准,或如图9c和9d中示出的绕旋转轴线ra旋转。具体而言,曲轴75
延伸穿过探头手柄(“ph”)基座50和探头手柄41,所述探头手柄坐落在探头手柄基座50和探头手柄盖60之间,与旋转轴线ra旋转对齐。这样,经由对在导轨71上横向滑动的滑块72的控制,曲轴75的横向运动将使探头手柄40与旋转轴线ra旋转对齐地横向移动,如图9a和9b中所例示的。此外,经由对旋转马达73的控制,曲轴绕旋转轴线ra的旋转运动将使探头手柄40绕旋转轴线ra旋转,如图9c和9d中所例示。
32.在实践中,如图7中所示的致动器平台70提供了用于探头40的能俯仰和/或偏航的远侧头部42d的横向运动和旋转运动的另外两个(2)自由度。
33.回过来参照图2,机器人工作站20被构造成具有本领域公知的硬件、软件、固件和/或电路,以便执行经由用户输入而产生用于机器人致动器30的机动化的齿轮的马达指令的技术。在实践中,机器人工作站20可实施产生用于主题探针的特定致动方案的马达指令的任何已知技术。对tee探头14来说,更具体而言,机器人工作站20执行用于产生马达指令来控制探头14的远侧头部的俯仰自由度和偏航自由度的已知技术。另外,对于致动器平台70或利于探头14的远侧头部的横向运动和旋转运动的任意其他致动器平台,致动器平台的控制器可以是单独控制器,其联接至机器人工作站20或并入机器人工作站20。在致动器平台的控制器联接至或并入机器人工作站20时,机械人工作站20被构造成具有本领域公知的硬件、软件、固件和/或电路,以便执行经由用户输入而产生用于致动器平台的控制器的马达指令的已知技术。
34.同样在实施中,机器人工作站20可实施用于与机器人致动系统的一个或多个用户形成接口的已知部件和方案。对图2来说,更具体而言,在直接控制方案中,机器人工作站20采用利于由超声心动图人员13对tee探头14的头部进行直接控制的适当的用户接口(未示出)(例如,操纵杆、鼠标、触屏等)。在协作控制方案中,机器人工作站20采用利于由超声心动图人员13和心脏病专家15对tee探头14的头部进行共同控制的适当的用户接口(未示出)(例如,操纵杆、鼠标、触屏等)。
35.参照图1-9,本领域普通技术人员将意识到本发明的众多益处,包括但不限于:(1)通过本发明的机器人工作站对超声探头的一个或多个自由度的远程控制,这调整超声探头的超声成像体积;(2)将本发明的机器人致动器改造成现有超声探头的能力;以及(3)在超声心动图人员或其他工作人员出于任意原因决定返回手动操作时,快速从超声探头移除本发明的机器人致动器的能力。
36.虽然已经示出和描述了本发明的各个实施例,但本领域技术人员应该理解的是本文所述的本发明的实施例是图示性的,并且能够在不偏离本发明的真实范围的情况下做出各种变化和修改,且等同物能够替换其元件。另外,在不偏离中心范围的情况下,能够做出许多修改以适应本发明的教导。因此,意图上本发明并不限于具体实施例(如设想到的用于执行本发明的最佳模式而公开的),而是本发明包含落入所附权利要求范围内的所有实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。