1.本发明涉及运动康复技术领域,具体为一种零重力多关节康复训练系统。
背景技术:
2.肌肉功能检查和评价是康复医学中最基本、最重要的内容之一。常用的肌肉功能检查包括等长肌力、等张肌力和等速肌力检查等。由于等速运动技术在肌肉功能测试上具有很好的准确性、可靠性和可重复性,在肌力训练上具有很好的安全性、高效性和合理性,故在体育训练及康复医学的临床实践和科学研究中有广泛的应用前景。
3.等速运动,又称可调节抗阻运动或恒定角速度运动,指利用专门设备,根据运动过程的肌力大小变化,相应调节外加阻力,使整个关节运动依预先设定速度运动,运动过程中肌肉用力仅使肌张力增高,力矩输出增加。等速运动能依肌力强弱、肌肉长度变化、力臂长短、疼痛疲惫等状况,提供适合其肌肉本身的最大阻力,且不会超过其负荷的极限。因此,等速运动具有相当高的效率与安全性。
4.等速设备的输出杆通过配件(连接件)与肢体进行连接,肢体主动用力以带动输出杆旋转,进行肌力测试与训练;
5.传统的等速肌力测试与训练设备存在以下缺点:第一、在等速肌力的测试过程中,没有考虑肢体重力以及配件重力对测试结果的影响;以膝关节屈伸运动为例,在伸展运动过程中,会受到肢体重力以及配件重力的制约,肢体输出的力量部分用于克服重力,导致等速设备测量到的力矩值实际上是肢体输出的力矩值减去重力产生的力矩值,即测量的力矩值小于肢体输出的力矩值;在屈曲运动过程中,会受到肢体重力以及配件重力的协助,导致等速设备测量到的力矩值实际上是肢体输出的力矩值加上重力产生的力矩值,即测量的力矩值大于肢体输出的力矩值;不同人之间的体重存在差异,相应地,肢体重力对测试数据的影响也不一样,导致不同人之间的肌力测试数据,无法进行客观的对比分析。第二、等速设备在临床应用中,肌力3~4级的患者因为受到配件重力的制约,很难进行关节全范围运动。以肩关节屈伸运动为例,手臂由垂直向下抬至垂直向上的过程中,当手臂运动至水平位置时,配件重力给手臂造成的负荷最大,肌力偏弱的患者很难继续向上伸展,无法完成关节全范围运动,影响肌力的训练效果,也不利于等速设备在临床上的应用与推广。若能将肢体重力以及配件重力的影响消除或者降至最低,便能大大提高肌力测试的准确性、可对比性,也有助于肌力3~4级,甚至2级的患者使用等速设备进行训练,以增强肌力力量,改善肢体运动功能,有利于等速设备在临床上的应用与推广。因此零重力多关节康复训练系统。本发明在输出杆上设有手部固定机构,来对使用者的手部与输出杆进行固定,避免手部握力较弱者在使用时,手部与输出杆容易发生脱离,而与手部发生碰撞造成损伤,并且也便于手部握力较弱者进行使用;其中手部固定机构,使用者将手部穿入到穿孔内,然后供气设备对充气囊进行充气,则充气囊发生膨胀,从而使得硅胶材质的夹持块,来对手部的掌心和手背进行夹持从而起到了固定,另外储气罐上设有与储气罐连的活塞筒,所述活塞筒内设有沿活塞筒内腔移动的活塞块,通过驱动机构动活塞块沿着活塞筒内往复运动,从而对储气罐内的
气压发生波动,从而产生类似于正负压的状态,从而对手部起到了按摩的作用,提高了康复训练效果。
技术实现要素:
6.为了解决上述技术问题,本发明提供了如下的技术方案:
7.本发明一种零重力多关节康复训练系统,包括底座组件、动力组件、控制组件、座椅组件和计算机组件;
8.所述底座组件上设有支杆,所述动力组件转动设置在支杆的顶端;
9.所述动力组件包括壳体、输出杆、动力模块和传感器模块;动力模块包括设置在安装在壳体内的电机和减速箱,所述电机的输出轴与减速箱的输入端连接,所述输出杆与减速箱的输出端固定连接,所述动力模块为输出杆提供动力;传感器模块将采集到的力矩数据传输至控制组件,所述控制组件与计算机组件连接;。
10.作为本发明的一种优选技术方案,所述传感器模块包括电阻应变片、信号处理装置和信号传输装置;所述的电阻应变片粘贴在减速箱的转轴表面;所述信号处理装置和信号传输装置均安装在壳体上,信号处理装置将电阻应变片的模拟信号放大、滤波,经模数转换器转化成数字信号,然后利用信号传输装置将采集到的力矩数据传输至控制组件;所述输出杆上设有手部固定机构;所述手部固定机构包括固定在输出杆上的定位块,所述定位块和输出杆之间经拆卸机构进行固定,所述定位块上设有供手掌穿过的穿孔,穿孔的内壁两侧设有对手部的掌心和手背进行夹持的夹持块,所述夹持块为硅胶材质,所述夹持块与穿孔之间设有充气囊,所述充气囊上设有充气管,底座组件内设有与充气管连接的供气设备,且所述供气设备与充气管连接;所述供气设备包括储气罐和与储气罐连接压缩机,所述储气罐上设有与储气罐连的活塞筒,所述活塞筒内设有沿活塞筒内腔移动的活塞块,所述活塞筒内设有驱动活塞块沿着活塞筒内往复运动的驱动机构,所述充气囊上设有放气嘴,且放气嘴上设有放气阀。
11.作为本发明的一种优选技术方案,所述控制组件包括控制器、伺服驱动器和供电装置,所述控制器与伺服驱动器相连接,伺服驱动器与电机相连接,控制器与信号传输装置相连接,信号传输装置与信号处理装置相连接,信号处理装置与电阻应变片相连接,实现数据传输,控制器与计算机相连接,实现数据传输。
12.作为本发明的一种优选技术方案,所述壳体上设有用于输出杆限位的限位盘,所述限位盘上设有用于对输出杆转动限位的限位块,
13.所述底座组件安装有锁定支杆的把手。
14.作为本发明的一种优选技术方案,所述支杆安装有手杆,手杆可锁定动力组件在某一固定角。
15.作为本发明的一种优选技术方案,所述输出杆为l型结构,所述拆卸机构包括设置在定位块上的且套设有输出杆外部的定位筒,所述定位筒经定位螺栓与输出杆相固定。
16.本发明的有益效果是:
17.本发明消除了肢体重力以及配件重力对测试结果的影响,显著提高等速肌力测试的准确性和可对比性。本发明实现了肢体在零重力下运动,有助于肌力3~4级,甚至2级的患者使用等速设备进行训练,增强肌力力量,改善肢体运动功能。
附图说明
18.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
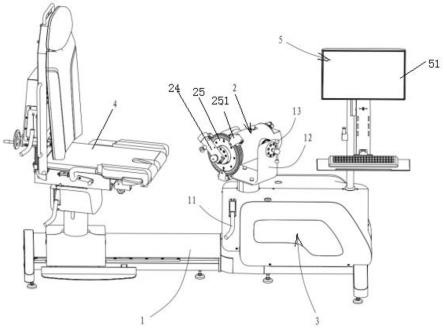
19.图1是本发明一种零重力多关节康复训练系统的结构示意图;
20.图2是本发明一种零重力多关节康复训练系统的动力组件的结构示意图;
21.图3是本发明一种零重力多关节康复训练系统的电气框图;
22.图4是本发明一种零重力多关节康复训练系统的输出杆转动示意图;
23.图5是本发明一种零重力多关节康复训练系统的手部固定机构的结构示意图;
24.图6是本发明一种零重力多关节康复训练系统的供气设备的结构示意图。
25.图中:1、底座组件;11、把手;12、支杆;13、手杆13;2、动力组件;21、壳体;24、输出杆;25、限位盘;251、限位块; 26、动力模块;261、电机;262、减速箱;27、传感器模块;271、电阻应变片;272、信号处理装置;273、信号传输装置;3、控制组件;31、控制器;32、伺服驱动器;4、座椅组件;5、计算机组件;51、计算机;6、手部固定机构;601、定位块;602、穿孔; 603、夹持块;604、充气囊;605、充气管;606、供气设备;607、储气罐;608、压缩机;609、活塞筒;610、活塞块;611、定位筒。
具体实施方式
26.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
27.实施例:一种零重力多关节康复训练系统,如图1-6所示,包括底座组件1、动力组件2、控制组件3、座椅组件4和计算机组件5;计算机组件5包括计算机51、键盘鼠标、操作软件和支架。操作软件用于设定等速设备的工作模式和运行参数,数据接收、处理、存储和分析,形成报告。底座组件1移动连接座椅组件4,可进行调整;。
28.所述底座组件1上设有支杆12,所述动力组件2转动设置在支杆12的顶端;底座组件1安装有把手11,把手11可锁定支杆12;支杆12安装有手杆13,手杆13可锁定动力组件2在某一固定角度。
29.所述动力组件2包括壳体21、输出杆24、动力模块26和传感器模块27;动力模块26包括设置在安装在壳体21内的电机261 和减速箱262,所述电机的输出轴与减速箱的输入端连接,所述输出杆24与减速箱262的输出端固定连接,所述动力模块26为输出杆24提供动力;所述的传感器模块27用于采集使用者施加至输出杆24上的力矩数据;传感器模块27包括电阻应变片271、信号处理装置272和信号传输装置273;所述的电阻应变片271粘贴在减速箱262的转轴表面;所述信号处理装置272和信号传输装置273均安装在壳体21上,信号处理装置272将电阻应变片271 的模拟信号放大、滤波,经模数转换器转化成数字信号。信号传输装置273采用电刷式集流环方式,在连续旋转的同时,在固定位置与旋转位置之间传输电源和信号,将采集到的力矩数据传输至控制组件3所述控制组件3与计算机组件5连接。所述输出杆 24上设有手部固定机构6;所述手部固定机构6包括固定在输出杆24上的定位块601,所述定位块601和输出杆24之间经拆卸机构进行固定,所述定位块601上设有供手掌穿过的穿孔602,穿孔 602的内壁两侧设有对手部的掌心和手背进行夹持的夹持块603,所述夹持块603为硅胶材质,所述夹持块603与穿孔602之间设有充气囊604,所述充气囊604上设
有充气管605,底座组件1内设有与充气管605连接的供气设备606,且所述供气设备606与充气管605连接;所述供气设备606包括储气罐607和与储气罐607 连接压缩机608,所述储气罐607上设有与储气罐607连的活塞筒 609,所述活塞筒609内设有沿活塞筒609内腔移动的活塞块610,所述活塞筒609内设有驱动活塞块610沿着活塞筒609内往复运动的驱动机构,所述充气囊604上设有放气嘴,且放气嘴上设有放气阀。输出杆上设有手部固定机构6,来对使用者的手部与输出杆进行固定,避免手部握力较弱者在使用时,手部与输出杆容易发生脱离,而与手部发生碰撞造成损伤,并且也便于手部握力较弱者进行使用;其中手部固定机构6,使用者将手部穿入到穿孔 602内,然后供气设备606对充气囊604进行充气,则充气囊604 发生膨胀,从而使得硅胶材质的夹持块603,来对手部的掌心和手背进行夹持从而起到了固定,另外储气罐607上设有与储气罐607 连的活塞筒609,所述活塞筒609内设有沿活塞筒609内腔移动的活塞块610,通过驱动机构动活塞块610沿着活塞筒609内往复运动,从而对储气罐607内的气压发生波动,从而产生类似于正负压的状态,从而对手部起到了按摩的作用,提高了康复训练效果。其中储气罐上设有对储气罐内部气压进行检查的气压表。
30.所述控制组件3包括控制器31、伺服驱动器32和供电装置,所述控制器31与伺服驱动器32相连接,伺服驱动器32与电机261 相连接,控制器31与信号传输装置273相连接,信号传输装置273 与信号处理装置272相连接,信号处理装置272与电阻应变片271 相连接,实现数据传输,控制器31与计算机51相连接,实现数据传输。
31.所述壳体21上设有用于输出杆24限位的限位盘25,所述限位盘25上设有用于对输出杆24转动限位的限位块251,来对输出杆24进行转动限位。所述输出杆24为l型结构,所述拆卸机构包括设置在定位块601上的且套设有输出杆24外部的定位筒611,所述定位筒611经定位螺栓与输出杆24相固定。
32.本发明消除了肢体重力以及配件重力对测试结果的影响,显著提高等速肌力测试的准确性和可对比性。本发明实现了肢体在零重力下运动,有助于肌力3~4级,甚至2级的患者使用等速设备进行训练,增强肌力力量,改善肢体运动功能。
33.该种零重力多关节康复训练系统的使用方法是,步骤1、使肢体的运动轴心与动力组件中的电机的旋转轴心同轴对齐;利用肢体主动带动动力组件中的输出杆旋转,进行肌力测试与训练;
34.步骤2、设定肢体的运动速度,顺时针方向的运动速度v1,逆时针方向的运动速度v2;同时设定肢体的运动范围,顺时针方向运动的最大位置p1,逆时针方向运动的最大位置p2;
35.步骤3、实时获取数据输出杆角度和减速箱转轴的力矩;
36.步骤4、进行肢体称重,计算肢体以及配件在水平位置的重力力矩;
37.步骤5、根据肢体的运动位置来设定电机的转动方向,通过对电机限速的实现肢体等速运动;
38.步骤6、通过电机输出力矩来抵消重力产生的力矩,使肢体在零重力的状态下进行运动;
39.步骤7、计算得到肢体输出的力矩、角度、速度、运动方向的信息,经过数据处理和分析后,形成报告。
40.在步骤1前进行预定义,设定定义输出杆垂直向下时,输出杆的角度θ为0
°
,按顺时
针方向转动,角度θ递增,按逆时针方向转动,角度θ递减;定义力矩值为正数时,力矩方向为顺时针方向,力矩值为负数时,力矩方向为逆时针方向。
41.所述的步骤4中进行肢体称重,计算肢体以及配件在水平位置的重力力矩的方法是,将肢体尽可能水平放置;电机锁定不动,即固定肢体不动,完全放松肢体,肢体不用力,获取此时输出杆角度θ0,减速箱转轴力矩m0;根据输出杆角度θ0和减速箱转轴力矩m0,计算肢体以及配件在水平位置的重力力矩mg;
42.计算公式为,mg=m0/sinθ0。
43.所述的步骤5中根据肢体的运动位置来设定电机的转动方向的方法是,
44.若肢体从位置p2向位置p1运动,设定电机的转动方向为顺时针方向,在运动至位置p1之前,即使肢体逆时针方向用力,也不改变电机的转动方向,在运动至位置p1之后,改变电机的转动方向为逆时针方向;
45.若肢体从位置p1向位置p2运动,设定电机的转动方向为逆时针方向,在运动至位置p2之前,即使肢体顺时针方向用力,也不改变电机的转动方向,在运动至位置p2之后,改变电机的转动方向为顺时针方向。
46.所述的通过电机限速的方式实现肢体等速运动的方法是,根据牛顿运动定律,肢体在匀速运动过程中,肢体的作用力与电机的反作用力大小相等;当肌力增大,电机相应地增大阻力,当肌力减小,电机相应地减小阻力;
47.若肢体从位置p2向位置p1运动,设定电机的最大转速为v3,肢体顺时针方向用力,带动电机加速至v3,肢体继续增大力量,电机保持速度v3不变,运动过程中肌肉用力仅使肌张力增高,力矩输出增加,但运动速度恒定,肢体逆时针方向用力或者停止用力,电机减速至停止;
48.若肢体从位置p1向位置p2运动,设定电机的最大转速为v4,肢体逆时针方向用力,带动电机加速至v4,肢体继续增大力量,电机保持速度v4不变,运动过程中肌肉用力仅使肌张力增高,力矩输出增加,但运动速度恒定,肢体顺时针方向用力或者停止用力,电机减速至停止。
49.所述的步骤6中通过电机输出力矩来抵消重力产生的力矩的方法是,
50.当肢体从位置p2向位置p1运动,当输出杆的角度θ1在第三象限和第四象限中,肢体以及配件提供阻力,制约肢体作顺时针方向的运动,电机实时输出顺时针方向的力矩m1,以抵消肢体重力以及配件重力产生的力矩,
51.计算公式:m1=mg
×
sinθ1;
52.当肢体从位置p2向位置p1运动,当输出杆的角度θ2在第一象限和第二象限中,肢体以及配件提供助力,协助肢体作顺时针方向的运动,电机实时输出逆时针方向的力矩m2,以抵消肢体重力以及配件重力产生的力矩,
53.计算公式:m2=mg
×
sinθ2;
54.当肢体从位置p1向位置p2运动,当输出杆的角度θ3在第三象限和第四象限中,肢体以及配件提供助力,协助肢体作逆时针方向的运动,电机实时输出顺时针方向的力矩m3,以抵消肢体重力以及配件重力产生的力矩,
55.计算公式:m3=mg
×
sinθ3;
56.当肢体从位置p1向位置p2运动,当输出杆的角度θ4在第一象限和第二象限中,肢
体以及配件提供阻力,制约肢体作逆时针方向的运动,电机实时输出逆时针方向的力矩m4,以抵消肢体重力以及配件重力产生的力矩,
57.计算公式:m4=mg
×
sinθ4。
58.所述步骤7中的计算得到肢体输出的力矩的方法是,
59.电机输出力矩抵消了肢体重力以及配件重力产生的力矩,但是减速箱转轴发生了形变,此时转轴力矩不等于肢体输出的力矩 m6;
60.根据减速箱转轴力矩m5以及电机实时输出的力矩,计算肢体输出的力矩m6。
61.当肢体从位置p2向位置p1运动,当输出杆的角度θ1在第三象限和第四象限中,电机实时输出顺时针方向的力矩为m1,则 m6=m5 m1;
62.当肢体从位置p2向位置p1运动,当输出杆的角度θ2在第一象限和第二象限中,肢体以及配件提供助力,电机实时输出逆时针方向的力矩为m2,则m6=m5-m2;
63.当肢体从位置p1向位置p2运动,当输出杆的角度θ3在第三象限和第四象限中,肢体以及配件提供助力,电机实时输出顺时针方向的力矩为m3,则m6=m5-m3;
64.当肢体从位置p1向位置p2运动,当输出杆的角度θ4在第一象限和第二象限中,肢体以及配件提供阻力,电机实时输出逆时针方向的力矩为m4,则m6=m5 m4。
65.最后应说明的是:以上仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。