1.本发明涉及智能动力下肢假肢技术领域,尤其涉及一种智能动力下肢假肢测试系统及测试方法。
背景技术:
2.智能动力下肢假肢是协助截肢患者日常生活、正常工作的重要辅助装置。目前下肢假肢的关节绝大多数是无动力的被动假肢,残疾人穿戴这种假肢行走时,会要消耗更多的能量,且患侧与健康侧表现出明显的不对称性,面对更加复杂的行走环境,如上下楼梯或不平整地面,使用者的运动稳定性会受到影响。
3.智能动力下肢假肢中,数据采集和系统调试是假肢实现智能控制的关键因素,而实现数据采集最有效的方法是由截肢患者穿戴进行,但这在假肢研制的初始阶段难于进行。现有技术中假肢数据采集主要是通过四角位移传感器采集正常人行走的关节角度和角速度,然后直接运用到智能动力假肢上。但是上述方式会存在无法准确判断数据的真实性的问题,在数据准确度方面也存在不足。同时现有技术中的假肢系统调试过程通常是由正常人将膝盖弯曲穿上护具绑在假肢上进行测试,由于穿戴的姿势是弯曲的,腿部长时间不能伸直,测试者舒适性体验较差。因此,提供一种针对于智能动力下肢假肢测试能够提高数据准确度、调试舒适性的测试系统是当前亟待解决的问题。
4.如中国专利申请cn111568612a公开一种膝关节假肢测试系统及测试方法,该方案是通过模拟截肢患者残肢的运动来匹配真实人体下肢运动曲线,为组装在接口的智能膝关节提供准确的测试环境;以及中国专利申请公开一种下肢假肢步态试验系统,通过采样四角位移传感器采集模拟腿的关节角度,将正常人行走时完整步态周期中的步态作为控制信号,通过运动控制卡控制动力源,动力源的输出经传动装置驱动模拟腿的运动,用于实现正常人体行走步态的模拟。上述方案均会存在无法准确判断数据的真实性,数据准确度不高的问题。因此,亟需提供一种智能动力下肢假肢的测试系统,以使得能够提高测试的数据准确度,同时能够提高测试舒适体验度以及安全可靠性。
技术实现要素:
5.本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种结构简单紧凑、测试精度高以及运动自然、环境适应性强、测试舒适体验度好且安全性稳定性的智能动力下肢假肢测试系统及测试方法。
6.为解决上述技术问题,本发明提出的技术方案为:
7.一种智能动力下肢假肢测试系统,其特征在于:包括动力智能假肢以及用于离线采集所述动力智能假肢多个关节点位置的运动轨迹、位置信息以及姿态数据以作为参考数据的动作捕捉系统,所述动力智能假肢包括用于支撑测试人员腿部的腿部支架、用于提供测试人员足部支撑的脚底板仿生部件、用于腿部关节位置固定的关节固定组件以及关节驱动组件、脚掌仿生部件,所述动力智能假肢还包括多个惯性测量单元以及用于采集足底力
的脚底力传感器,各所述惯性测量单元分别设置在指定关节点处,以用于在线采集所述动力智能假肢在行走过程中的运动数据以得到各个关节的相位,所述脚底力传感器设置在所述脚掌仿生部件的底部。
8.进一步的,所述动作捕捉系统包括多个信号接收装置以及多组摄像头,各个所述信号接收装置分别布置在所述动力智能假肢的指定关节点处,各组所述摄像头用于离线采集所述动力智能假肢不同角度的图像数据。
9.进一步的,所述信号接收装置分别设置在所述动力智能假肢的大腿、小腿以及脚掌对应位置处,以分别用于采集大腿、小腿以及脚掌位置的运动轨迹、位置信息以及姿态数据。
10.进一步的,所述惯性测量单元分别设置在所述动力智能假肢的大腿、小腿和脚掌对应位置处,以用于分别采集行走过程中大腿、小腿、脚掌位置处的三维角速度和加速度数据,以得到各个关节的相位。
11.进一步的,所述关节固定组件包括大腿绑带、大腿固定法兰、小腿绑带以及足底绑带,以用于分别固定测试人员的大腿、小腿以及足部。
12.进一步的,所述关节驱动组件包括膝关节驱动电机、踝关节驱动电机、踝关节电机法兰以及踝关节输出轴,所述膝关节驱动电机安装在所述大腿固定法兰上以驱动小腿架进行旋转运动,所述踝关节驱动电机安装在所述踝关节电机法兰上,以驱动所述踝关节输出轴进行旋转运动,所述踝关节输出轴与所述脚掌仿生部件固连。
13.一种利用上述智能动力下肢假肢测试系统的测试方法,步骤包括:
14.s1.测试人员穿戴所述动力智能假肢并设置所述动力智能假肢为被动模式,控制所述动作捕捉系统离线采集被动模式下所述动力智能假肢行走过程中的运动轨迹、位置信息以及姿态数据;
15.s2.通过所述惯性测量单元在线采集所述动力智能假肢在行走过程中运动数据,得到各个关节的相位;
16.s3.通过所述脚底力传感器在线采集所述动力智能假肢在行走过程中的足底力,并测量站立或行进时足部的压力变化状态;
17.s4.将步骤s1采集的数据作为参考数据,根据步骤s2采集得到的各个关节的相位以及步骤s3测量得到的足部的压力变化状态,控制所述动力智能假肢中各关节的运动状态。
18.进一步的,测试人员穿戴所述动力智能假肢时,测试人员足部踩在脚底板仿生部件上,并通过足底绑带固定,测试人员的小腿和大腿则分别通过小腿绑带以及大腿绑带绑缚固定,通过安装在大腿固定法兰上的膝关节驱动电机驱动小腿架进行旋转运动,通过安装在踝关节电机法兰上的踝关节驱动电机驱动踝关节输出轴进行旋转运动并带动脚掌仿生部件。
19.进一步的,所述步骤s2中实时采集的运动数据包括大腿、小腿、脚掌的三维角速度和加速度数据。
20.进一步的,所述步骤s4包括:以所述步骤s1采集的数据作为参考数据,根据测量得到的足部的压力变化状态分析所述动力智能假肢当前所处的行走状态,按照所述行走状态以及实时采集得到的各个关节的相位生成步态轨迹并计算各个关节所需的控制量,按照计
算得到的所述控制量驱动各所述动力智能假肢的关节运动。
21.与现有技术相比,本发明的优点在于:
22.1、本发明通过设置动作捕捉系统采集被动模式下动力智能假肢各个位置的三维运动轨迹、位置、姿态等数据作为参考数据,借助于动作捕捉系统的数据采集精度高、误差小等特性,能够使得更准确的评估系统误差,同时结合惯性测量单元、脚底力传感器在线采集动力智能假肢的关节相位、足底压力,动态控制各关节驱动组件运动状态,能够有效提高动力智能假肢行走过程的控制精度,且测试过程中无需复杂的控制过程,还可以提高测试效率以及安全可靠性。
23.2、本发明智能动力下肢通过由腿部支架、脚底板仿生部件、关节固定组件以及关节驱动组件、脚掌仿生部件等,假肢能使穿戴测试人员直立行走,相比于传统假肢测试机构需要在测试过程中将小腿弯曲绑缚于假肢上,可以有效提高测试的舒适性,从而使得整个测试过程更加舒适、真实。
附图说明
24.图1是本实施例智能动力下肢假肢测试系统的布置原理示意图。
25.图2是本实施例中动力智能假肢的主视图。
26.图3是本实施例中动力智能假肢的侧视图。
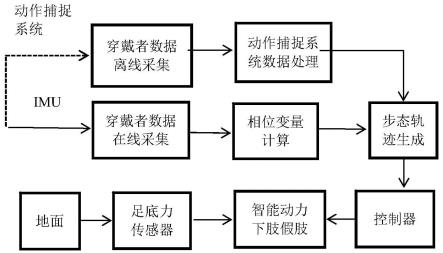
27.图4是本实施例中智能动力下肢假肢测试系统的控制流程示意图。
28.图例说明:1、动力智能假肢;111、大腿支架;112、小腿支架;102、脚底板仿生部件;131、大腿绑带;132、大腿固定法兰;1331、第一小腿绑带;1332、第二小腿绑带;1341、第一足底绑带;1342、第二足底绑带;141、膝关节驱动电机;142、踝关节驱动电机;143、踝关节电机法兰;144、踝关节输出轴;105、脚掌仿生部件;106、脚底力传感器;2、动作捕捉系统;211、第一信号接收装置;212、第二信号接收装置;213、第三信号接收装置;202、摄像头。
具体实施方式
29.以下结合说明书附图和具体优选的实施例对本发明作进一步描述,但并不因此而限制本发明的保护范围。
30.如图1~3所示,本实施例智能动力下肢假肢测试系统包括动力智能假肢1以及用于离线采集动力智能假肢1的多个关节点位置的运动轨迹、位置信息以及姿态数据以作为参考数据的动作捕捉系统2,动力智能假肢1包括用于支撑测试人员腿部的腿部支架、用于提供测试人员足部支撑的脚底板仿生部件102、用于腿部关节位置固定的关节固定组件以及关节驱动组件、脚掌仿生部件105,动力智能假肢1还包括多个惯性测量单元以及用于采集足底力的脚底力传感器106,各惯性测量单元分别设置在指定关节点处,以用于在线采集动力智能假肢1在行走过程中的运动数据以得到各个关节的相位,脚底力传感器106设置在脚掌仿生部件105的底部。
31.本实施例通过设置动作捕捉系统2采集被动模式下动力智能假肢1各个位置的三维运动轨迹、位置、姿态等数据作为参考数据,借助于动作捕捉系统2的数据采集精度高、误差小等特性,能够使得更准确的评估系统误差,同时结合惯性测量单元、脚底力传感器106在线采集动力智能假肢1的关节相位、足底压力,动态控制各关节驱动组件103运动状态,能
够有效提高动力智能假肢1行走过程的控制精度,且测试过程中无需复杂的控制过程,还可以提高测试效率以及安全可靠性。同时本实施例动力智能假肢1能使穿戴测试人员直立行走,相比于传统假肢测试机构需要在测试过程中将小腿弯曲绑缚于假肢上,可以有效提高测试的舒适性,从而使得整个测试过程更加舒适、真实。上述被动模式也即为动力智能假肢1依据驱动控制力被动驱动行走。
32.本实施例中,动作捕捉系统2具体包括多个信号接收装置201以及多组摄像头202,各个信号接收装置101分别布置在动力智能假肢1的指定关节点处,各组摄像头202用于离线采集动力智能假肢1不同角度的图像数据,以精准采集动力智能假肢1不同位置的运动数据。
33.本实施例中,信号接收装置201具体分别设置在动力智能假肢1上大腿、小腿以及脚掌所对应的位置上,以分别用于采集大腿、小腿以及脚掌的运动轨迹、位置信息以及姿态数据等数据,可以获取动力智能假肢1上的关键关节位置的状态数据,以提供作为参考数据评估系统误差。可以理解的是,还可以根据实际需求在动力智能假肢1上其他需要关注的位置处布置信号接收装置201。
34.如图1所示,在具体应用实施例中布置六组摄像头202,分设于动力智能假肢1周围的不同方位,各摄像头202之间的间距相同(每两个摄像头之间间隔60度),以形成360度采集范围完整覆盖动力智能假肢1的各个方向,从而可以全面的采集动力智能假肢1各部位的图像信息,以确定各部位的运动状态。当然摄像头202布置的数量以及摄像头之间的间距均可以根据实际需求配置。
35.本实施例中,惯性测量单元102分别设置在大腿、小腿和脚掌112上,以用于分别采集行走过程中大腿、小腿、脚掌112的三维角速度和加速度数据,得到各个关节的相位。惯性测量单元102主要是进行在线运动数据的采集,即为在线状态下实时采集下肢假肢101的运动状态数据得到各个关节的实时相位状态。
36.本实施例中,关节固定组件具体包括大腿绑带131、大腿固定法兰132、小腿绑带以及足底绑带,以用于分别固定测试人员的大腿、小腿以及足部。关节驱动组件分别设置在指定各关节点处,以用于根据动作捕捉系统2、惯性测量单元以及脚底力传感器106采集的数据,产生控制信息驱动动力智能假肢1中各个关节的运动状态。具体关节驱动组件包括膝关节驱动电机141、踝关节驱动电机142、踝关节电机法兰143以及踝关节输出轴144,膝关节驱动电机141安装在大腿固定法兰132上以驱动小腿架进行旋转运动,踝关节驱动电机142安装在踝关节电机法兰143上,以驱动踝关节输出轴144进行旋转运动,踝关节输出轴144与脚掌仿生部件105固连。
37.如图2、3所示,本实施例动作捕捉系统2具体包括六组高速动捕相机以及安装在动力智能假肢1上的信号接收装置201,用于采集各个位置的三维运动轨迹、位置、姿态等数据,其中,第一信号接收装置211设置在大腿关节上,用于采集大腿的数据;第二信号接收装置212设置在小腿上,用于采集小腿的数据;第三信号接收装置213设置在脚掌上,用于采集脚掌的数据。动力智能假肢1主要包括大腿绑带131、大腿固定法兰132、大腿架111、小腿绑带(包括第一小腿绑带1331以及第二小腿绑带1332)、小腿架112、踝关节电机法兰143、踝关节输出轴144以及惯性测量单元(imu,包括大腿惯性测量单元161、小腿惯性测量单元162以及脚掌惯性测量单元163)、膝关节驱动电机141、足底绑带(包括第一足底绑带1341、第二足
底绑带1342)、踝关节驱动电机142、脚底板仿生件102、脚掌仿生部件105以及脚底力传感器106。
38.当测试人员穿戴动力智能假肢1时,在行走过程中,测试人员足部踩在脚底板仿生部件102上,并通过足底绑带固定,测试人员的小腿和大腿则分别通过小腿绑带以及大腿绑带131绑缚固定,通过安装在大腿固定法兰132上的膝关节驱动电机141驱动小腿架进行旋转运动,通过安装在踝关节电机法兰143上的踝关节驱动电机142驱动踝关节输出轴144进行旋转运动并带动脚掌仿生部件105。本实施例通过采用上述动力智能假肢1,穿戴测试人员可以直立行走,而无需将小腿弯曲绑缚于假肢上,相比于传统假肢测试机构需要在测试过程中将小腿弯曲绑缚于假肢上,可以有效提高测试的舒适性,使得整个测试过程更加舒适、真实,从而提高测试效果。
39.如图4所示,本实施例利用上述智能动力下肢假肢测试系统的测试方法的详细步骤包括:
40.s1.测试人员穿戴动力智能假肢1并设置动力智能假肢1为被动模式,控制动作捕捉系统2离线采集被动模式下动力智能假肢1行走过程中的运动轨迹、位置信息以及姿态数据;
41.s2.通过惯性测量单元在线采集动力智能假肢1在行走过程中运动数据,得到各个关节的相位;
42.s3.通过脚底力传感器106在线采集动力智能假肢1在行走过程中的足底力,并测量站立或行进时足部的压力变化状态;
43.s4.将步骤s1采集的数据作为参考数据,根据步骤s2采集得到的各个关节的相位以及步骤s3测量得到的足部的压力变化状态,控制动力智能假肢1中各关节的运动状态。
44.本实施例中,当测试人员穿戴动力智能假肢时,先通过动作捕捉系统2离线采集测试人员行走过程中的运动数据并作为参考值,该参考值可以用于评估系统误差,同时结合惯性测量单元在线采集测试人员在行走过程中运动数据,得到各个关节的相位,通过脚底力传感器106测量足底力,并通过动态量测测试人员站立或行进时足部的压力变化以精准控制假肢的状态。
45.上述步骤s2中在线采集的运动数据包括大腿、小腿、脚掌的三维角速度和加速度数据等,还可以进一步采集其他的运动状态数据以提高测试精度。
46.本实施例步骤s4具体包括:以步骤s1采集的数据作为参考数据,根据测量得到的足部的压力变化状态分析动力智能假肢1当前所处的行走状态,按照行走状态以及实时采集得到的各个关节的相位生成步态轨迹,并计算各个关节所需的控制量,按照计算得到的控制量驱动各动力智能假肢1的关节运动,实现假肢的控制。
47.在具体应用实施例中,利用上述智能动力下肢假肢测试系统进行测试的详细步骤为:
48.首先,将动力智能假肢1设置成被动模式,测试人员穿戴好之后,通过动力动作捕捉系统1采集测试人员行走过程中的离线数据并将该离线数据作为参考值;
49.行走过程中,测试人员足部踩在脚底板仿生部件102上,并通过足底绑带固定,测试人员的小腿和大腿则分别通过小腿绑带以及大腿绑带131绑缚固定,通过安装在大腿固定法兰132上的膝关节驱动电机141驱动小腿架进行旋转运动,通过安装在踝关节电机法兰
143上的踝关节驱动电机142驱动踝关节输出轴144进行旋转运动并带动脚掌仿生部件105;
50.然后由各惯性测量单元分别在线采集行走过程中大腿、小腿、脚掌的三维角速度和加速度数据,从而得到各个关节的相位;
51.再由脚底力传感器106测量脚底的压力,通过动态量测受测者站立或行进时足部的压力变化,实现对多种步态信息的分析与处理,以实现假肢的状态控制。
52.本发明通过采用动作捕捉系统1离线采集被动模式下假肢各个位置的三维运动轨迹、位置、姿态等数据以作为参考值,由于动作捕捉系统数据采集精度高、误差小,能更准确评估系统误差,动作捕捉系统1的三维测量精度可达到0.1mm,能有效提高智能动力下肢假肢行走过程的控制精度,同时动力智能假肢1能使穿戴测试人员直立行走,可使测试人员腿部伸直穿戴于假肢上,相比于其他假肢测试机构测试过程中将小腿弯曲绑缚于假肢上,有效提高了测试的舒适性,使得整个测试过程更加舒适、真实。
53.上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。