1.本发明涉及一种既能提高移车机器人回转机构承载力和效率,又能降低制造成本和降低启动扭力的一种用于移车机器人的回转机构,属机器人回转机构制造领域。
背景技术:
2.回转机构被广泛运用了自动机器人,从物流小车,到智能移车机器等。而近年来智能车库越来越多,衍生出来自动泊车机器。自动泊车机器因为需要将汽车自动停泊,所以需要很高的承载能力,并对回转精度也有很高的要求。目前,市场上现有的机器人回转机构在结构设计上由外圈、内圈、齿圈、齿轮及连接块等构成。内圈外圆与外圈内圆之间通过钢丝轨道连接,位于内圈上的齿圈与齿轮传动机构连接。其不足之处是:一是内圈与外圈之间回转所产生的力由齿圈中的齿承载,齿在运行过程中其承载力不仅小于800公斤,而且齿与齿之间的啮合所产生的摩损使得采用齿转动计算回转角度的精度降低;二是齿圈与齿轮传动机构不仅体积大,而且制造成本高;三是受齿圈与齿轮之间的摩擦力,其回转启动扭力大,能耗高。
技术实现要素:
3.设计目的:避免背景技术中的不足之处,设计一种无需齿轮式转,既可达到单一回转承载能力提升,从800kg提升至1200kg,又能将空间整体做小,满足移车机器人高度限制,并能降低25%左右成本同时,其回转启动扭力降低,可在5n,m以下,使使用过程更加高效,效率提升10%以上。
4.设计方案:为了实现上述设计目的。本发明在背景技术的基础上:1、采用钢丝轨道直接作为回转机构的传动机构的设计,是本发明的技术特征之一。这样设计的目的在于:一是淘汰了齿圈转动机构,使回转机构的承载力由目前800公斤提升到1200公斤(即钢丝轨道承载力);二是由于逃汰了齿轮传动机构,不仅降低了制造成本,而且空间整体做小,满足移车机器人高度限制。2、内圈水平圆面铣有开放式凹台且凹台上安装磁条的设计,是本发明的技术特征之二。这样设计的目的在于:在内圈水平圆面制作开放式凹台,该开放式凹台根据回转所需的角度进行设置,并且将与开放式凹台相匹配的磁条装入其内,即可与编码器形成回转角度调整及计算,以便后续实现定位控制,解决了齿圈转动计量回转角度所带来的精度差,启动扭力大的缺陷。
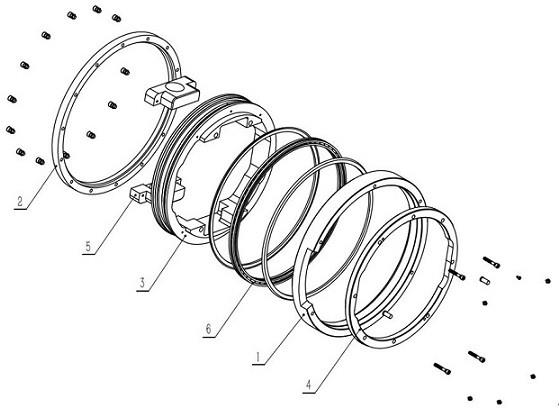
5.技术方案:一种用于移车机器人的回转机构,包括移车机器人回转机构,所述移车机器人回转机构中的内圈水平圆面铣有开放式凹台,凹台上安装磁条,内圈外圆面上制有多圈环形凹槽,内圈压圈叠加在内圈上;外圈和外圈压圈内圆面上分别制有环形凹槽,外圈压圈叠加在外圈上,该环形凹槽与内圈外圆面的多圈环形凹槽通过钢丝轨道组合连接构成回转机构。
6.本发明与背景技术相比,一是单个承载强度提升至1200kg;二是内外圈钢丝轨道连接,并在内圈中设置磁条空间能使用编码器控制,使使用寿命由背景技术20万次提升至
35万次;三是淘汰齿圈和齿转传动机构,使得回转机构启动预紧力降低至5n.m以下,而使用效率提升10%;四是内圈采用铸铁整体铸造,整体结构节约成本25%。
附图说明
7.图1是用于移车机器人的回转机构结构示意图,图中外圈1,外圈2,内圈3,内圈4 ,连接块5,钢丝轨道6。
8.图2是图1中内圈结构示意图。
9.图3是图1中钢丝轨道分布结构示意图。
10.图4是图3的断面结构示意图,其中轨道内圈7,轨道外圈8,保持架9,钢珠10。
11.图5是图1中外圈结构示意图。
12.图6是图1应用示意图。
13.图7是背景技术示意图,其中电机11,连接块12,齿轮13,齿轮14,外圈一15,内圈一16,油封17,外圈二18,内圈二19。
具体实施方式
14.实施例1:参照附图1-5。一种用于移车机器人的回转机构,包括移车机器人回转机构,所述移车机器人回转机构中的内圈3水平圆面铣有开放式凹台,凹台上安装磁条,内圈3外圆面上制有多圈环形凹槽,内圈压圈4叠加在内圈3上;外圈2和外圈压圈1内圆面上分别制有环形凹槽,外圈压圈1叠加在外圈2上,该环形凹槽与内圈3外圆面的多圈环形凹槽通过钢丝轨道6组合连接构成回转机构。钢丝轨道6系外购件。内圈3采用球墨铸铁整体铸造。内圈压圈4通过外圆设计凸台面能让最终成品与实际使用时用磁条编码器连接,取到定位功能。连接块5制作及安装系现有技术,在此不作叙述。
15.需要理解到是:上述实施例虽然对本发明设计思路的作了详细的文字描述,但是这些文字的描述,只是对本发明设计思路的简单文字描述,而不是对本发明设计思路的限制,任何不超出本发明设计思路的组合、增加或修改,均落入本发明的保护范围内。
技术特征:
1.一种用于移车机器人的回转机构,包括移车机器人回转机构,其特征是:所述移车机器人回转机构中的内圈水平圆面铣有开放式凹台,凹台上安装磁条,内圈外圆面上制有多圈环形凹槽,内圈压圈叠加在内圈上;外圈和外圈压圈内圆面上分别制有环形凹槽,外圈压圈叠加在外圈上,该环形凹槽与内圈外圆面的多圈环形凹槽通过钢丝轨道组合连接构成回转机构。2.根据权利要求1所述的用于移车机器人的回转机构,其特征是:内圈采用球墨铸铁整体铸造。3.根据权利要求1所述的用于移车机器人的回转机构,其特征是:内圈压圈上与使用的编码器连接。
技术总结
本发明涉及一种用于移车机器人的回转机构,包括移车机器人回转机构,所述移车机器人回转机构中的内圈水平圆面铣有开放式凹台,凹台上安装磁条,内圈外圆面上制有多圈环形凹槽,内圈压圈叠加在内圈上;外圈和外圈压圈内圆面上分别制有环形凹槽,外圈压圈叠加在外圈上,该环形凹槽与内圈外圆面的多圈环形凹槽通过钢丝轨道组合连接构成回转机构。优点:一是单个承载强度提升至1200kg;二是内外圈钢丝轨道连接,并在内圈中设置磁条空间能使用编码器控制,使使用寿命由背景技术20万次提升至35万次;三是淘汰齿圈和齿转传动机构,使得回转机构启动预紧力降低至5N.m以下,而使用效率提升10%;四是内圈采用铸铁整体铸造,整体结构节约成本25%。成本25%。成本25%。
技术研发人员:林秀薰 朱泉泉 王琦
受保护的技术使用者:浙江台玖精密机械有限公司
技术研发日:2022.05.28
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。