:
1.本发明属于降雨探测技术领域,具体涉及一种船用降雨探测装置及方法,能够在运动状态下准确探测降雨。
背景技术:
2.降雨探测是气象探测的重要项目,对降雨的准确探测有助于提高降雨预报精度、提升防灾减灾能力、促进大气与海洋科学研究的发展。海上降雨探测的实施依赖于船舶、浮标站和卫星等平台完成,由于卫星遥感对海面的探测精度较低,海面的降雨探测以船舶和浮标站为主。
3.雨量计通常采用收集降雨的方式对单个地点的降雨情况进行探测,需要设置雨量筒对降雨进行采集。其应用在船舶和浮标站等不稳定平台上存在诸多不足:第一,船舶在航行时雨滴相对雨量计的速度较大,当雨滴撞击在雨量筒上易飞溅,导致测量结果不准确;第二,降雨时空变率大,标准的翻斗式雨量计对降雨的最小分辨率为0.1mm,翻斗在没有收集到预设雨量时不会倒转,对降雨的响应时间较长,当雨量较小时,可能无法采集到降雨信息;第三,雨量筒固定安装在船舶上,其朝向随着船舶航行姿态的变化而变化,接收降雨的横截面与水平时不一致,导致测量结果不准确;第四,船体在大风浪等环境下会大幅晃动,可能导致翻斗在无雨情况下翻转,导致测量结果不准确。虽然有研究人员提出在雨量计底部加装稳定设施,使雨量筒能够保持垂直指向天空的状态,但是,此类设施体积大,不能解决雨滴飞溅和响应时间长等问题,没有得到大范围应用。
4.天气雷达作为大范围降雨探测设备,能够利用雷达反射率因子z与雨强r之间的对应关系:z=arb(a、b为系数)探测降雨。然而,天气雷达主要用于对空中降雨的监测预警和定量估计,一方面,其在低空存在盲区,空中估值与地面测值间存在偏差;另一方面,降雨的时空变率较大,而雷达单次完整探测的时间较长,时间分辨率较低;而且,天气雷达体积和耗能巨大,不适宜安装在浮标站和小吨位船舶上,除了少数大型船舶进行大范围预警探测外,天气雷达并没有在船舶降雨探测领域得到大规模应用。
5.现有技术中的降雨探测装置及方法在船舶等不稳定平台上存在的探测精度低、响应时间长等问题。因此,研发设计一种船用降雨探测装置及方法,在运动状态下对降雨进行准确探测,具有积极的社会和经济价值。
技术实现要素:
6.本发明的目的在于克服现有技术存在的缺点,寻求设计一种船用降雨探测装置及方法,通过微波雷达传感器对目标区域发射和接收电磁波探测降雨,根据姿态和环境风场信息对结果进行订正,实现运动状态下对降雨的准确探测。
7.本发明涉及的船用降雨探测装置能够应用于船舶和浮标站等不稳定平台进行降雨探测,其主体结构包括微波雷达传感器、姿态传感器、环境风传感器、数据处理模块和保护罩;降雨探测平台上设置有微波雷达传感器、姿态传感器和环境风传感器,微波雷达传感
器、姿态传感器和环境风传感器分别与数据处理模块电连接,当数据处理模块位于室内时,微波雷达传感器和姿态传感器的外侧设置有保护罩,当数据处理模块位于室外时,微波雷达传感器、姿态传感器和数据处理模块的外侧设置有保护罩。
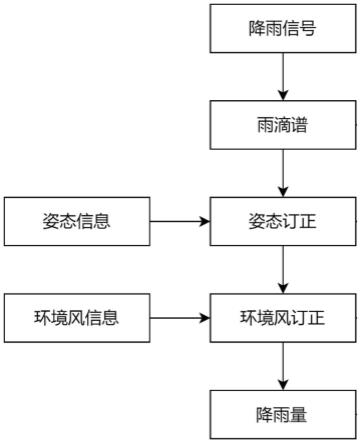
8.本发明涉及的船用降雨探测方法实施前,将分别与数据处理模块电连接的微波雷达传感器、姿态传感器和环境风传感器安装在降雨探测平台上,使微波雷达传感器的发射阵面与降雨探测平台的水平面保持一致;具体步骤如图1所示,包括计算雨滴谱、姿态订正、环境风订正和计算降雨特征量共四个步骤:
9.(1)计算雨滴谱
10.微波雷达传感器向目标区域发射电磁波,电磁波遇到降雨目标后发生散射,散射的电磁波作为降雨信号被微波雷达传感器接收,降雨信号经过滤波和放大处理后,通过快速傅里叶变换得到功率谱,由功率谱计算雨滴数浓度随尺度的分布,得到雨滴谱;
11.(2)姿态订正
12.根据姿态传感器探测到的姿态信息对雨滴谱进行姿态订正,得到剔除船舶姿态影响的雨滴谱;
13.(3)环境风订正
14.根据环境风传感器探测到的环境风信息对雨滴谱进行环境风订正,得到剔除环境风影响的雨滴谱;
15.(4)计算降雨特征量
16.通过雨滴谱计算雨强、雷达反射率因子、液态水含量等降雨特征量,对一段时间的雨强进行积分,得到该时段的降雨量。
17.本发明涉及的微波雷达传感器的频率为3-100ghz,用以发射和接收电磁波信号,对采集到的信号进行滤波和放大处理,提高质量后传输至数据处理模块,微波雷达传感器的发射阵面与降雨探测平台的水平面保持一致,以减小姿态变化;姿态传感器用以测量微波雷达传感器的姿态信息并将其传输至数据处理模块,姿态信息包括横摇α、纵摇β和升沉速度v
lift
;环境风传感器包括三维超声风传感器,用以测量三维相对风场并将其传输至数据处理模块,环境风信息包括横向的水平相对风v
α
、纵向的水平相对风v
β
和垂直相对风v
vertical
;数据处理模块用以处理接收到的信号,根据姿态传感器输出的姿态信息对微波雷达传感器的降雨信号进行姿态订正,根据环境风信息对雨滴的下落速度进行环境风订正,计算降雨的雨滴谱,进而计算雨强、雷达反射率因子、液态水含量等降雨特征量,对雨强进行时间积分,得到累积降雨量;保护壳具有防尘和防水功能,能够降低风阻,并隔绝外部环境的污染和侵蚀。
18.本发明与现有技术相比,通过微波雷达传感器对目标区域发射和接收电磁波探测降雨,根据姿态传感器和环境风传感器探测的姿态和环境风场信息对微波雷达传感器的结果进行订正,实现运动状态下对降雨的准确探测;其中,微波雷达采用扁平一体化结构的微带天线技术,相较于传统的抛物面天线,具有体积小、重量轻、易于集成等优点,能够有效减小全尺寸体积和风阻,安装后对平台的空气动力学特征影响较小,维护保养简便;其原理科学可靠,易于实现,在船舶和浮标站都安装有姿态传感器和环境风传感器条件下,只安装微波雷达传感器即可在不同运动状态下对降雨进行准确探测,解决现有技术在船舶等不稳定平台上降雨探测精度低、响应时间长的问题,提高海上降雨探测的精度,有利于推广应用。
附图说明:
19.图1为本发明涉及的船用降雨探测方法的流程框图。
20.图2为本发明涉及的船舶姿态示意图。
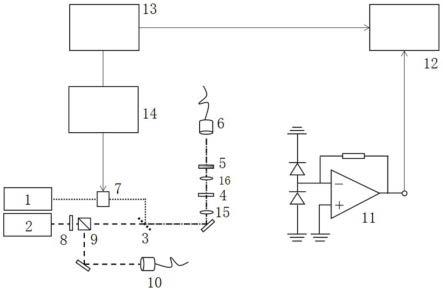
21.图3为本发明实施例1涉及的船用降雨探测装置的主体结构示意图。
22.图4为本发明实施例2涉及的船用降雨探测装置的主体结构示意图。
具体实施方式:
23.下面通过实施例并结合附图对本发明作进一步说明。
24.实施例1:
25.本实施例涉及的船用降雨探测装置主体结构如图3所示,包括微波雷达传感器1、姿态传感器2、环境风传感器3、数据处理模块4和保护罩5;降雨探测平台上设置有微波雷达传感器1、姿态传感器2和环境风传感器3,微波雷达传感器1、姿态传感器2和环境风传感器3分别与数据处理模块4电连接,微波雷达传感器1和姿态传感器2的外侧设置有保护罩5。
26.本实施例涉及的船用降雨探测方法应用于船舶的降雨探测,探测前,将分别与数据处理模块4电连接的微波雷达传感器1、姿态传感器2和环境风传感器3安装在船舶上,使微波雷达传感器1的发射阵面与船舶的水平面保持一致,使用具有防尘和防水功能的保护罩5包裹数据处理模块4、微波雷达传感器1和姿态传感器2,以降低风阻,并隔绝外部环境的污染和侵蚀;当微波雷达传感器1嵌入式安装在船体表面时,能够进一步降低风阻,保护线路;当微波雷达传感器1与船体刚性连接时,根据船舶的姿态信息与微波雷达传感器1的安装位置能够计算微波雷达传感器1的姿态信息,使用船舶测量的姿态和环境风信息对微波雷达传感器1的探测结果进行订正时,不需要额外安装姿态传感器2和环境风传感器3;具体步骤包括计算雨滴谱、姿态订正、环境风订正和计算降雨特征量共四个步骤:
27.(1)计算雨滴谱
28.微波雷达传感器1向目标区域发射电磁波,电磁波遇到降雨目标后发生散射,散射的电磁波作为降雨信号被微波雷达传感器1接收;
29.降雨信号经过滤波和放大处理后,通过快速傅里叶变换得到包含了多普勒频移信息的功率谱;
30.由功率谱计算得到雨滴数浓度随尺度的分布,即为雨滴谱;
31.将雨滴按多普勒频移fd分档,功率谱与雨滴谱的关系为:其中,n(di)为第i档雨滴数浓度,si为第i档功率密度,ai为根据仿真得到的雨滴权重函数,δdi为相邻尺度档的间隔,di为第i档fd对应的雨滴直径,通过雨滴下落速度与直径的对应关系得到,其中,雨滴下落速度根据多普勒效应计算;
32.(2)姿态订正
33.根据姿态传感器2探测到的姿态信息对雨滴谱进行姿态订正,得到剔除船舶姿态影响的雨滴谱;
34.由于船舶处于不稳定的运动状态,需要根据姿态传感器2探测到的姿态信息对雨滴相对微波雷达传感器1的径向速度进行姿态订正,以消除姿态变化导致的误差;
35.在如图2所示的船舶姿态示意图中,z轴代表重力方向,与水平面垂直,虚线标示的
平面为水平面,灰色标示的平面为船舶的实际姿态;
36.姿态传感器2探测到的姿态信息包括横摇α(船舶的横向倾角,左低右高为正)、纵摇β(船舶的纵向倾角,艏高艉低为正)和升沉速度v
lift
(船舶的上下起伏速度,向下为正),根据速度矢量叠加可得,雨滴相对微波雷达传感器的径向速度进行姿态订正的公式为:其中,v
trans
为订正后雨滴相对水平面的垂直下落速度,vd为目标区域雨滴相对微波雷达传感器的径向速度,根据多普勒效应计算得到;
37.(3)环境风订正
38.根据环境风传感器3探测到的环境风信息对雨滴谱进行环境风订正,得到剔除环境风影响的雨滴谱;
39.由于环境风场中的垂直风会直接影响雨滴的下落速度,当船舶处于非水平状态时,水平风也会影响雨滴相对微波雷达传感器的径向速度,需要根据环境风传感器3测得的环境风信息对雨滴相对水平面的下落速度进行订正;
40.环境风传感器3探测到的环境风信息包括横向的水平相对风v
α
(右侧风为正)、纵向的水平相对风v
β
(风由船艏至船艉为正)和垂直相对风v
vertical
(向上为正),根据速度矢量叠加可得,雨滴相对水平面的下落速度进行环境风订正的公式为:
41.v
correct
=v
trans
v
α
sinα v
β
sinβ v
vertical
42.其中,v
correct
是剔除环境风影响的雨滴实际下落速度;
43.(4)计算降雨特征量
44.雨滴谱是基础的降雨微物理量,通过雨滴谱能够计算得到包含雨强、雷达反射率因子和液态水含量的降雨特征量,对一段时间的雨强进行积分,得到该时段的降雨量;
45.雨强r的计算式为:
46.雷达反射率因子z的计算公式为:
47.液态水含量lwc的计算公式为:
48.其中,m为雨滴按多普勒频移fd的分档数,n(di)为第i档雨滴数浓度,di为第i档fd对应的雨滴直径,v
correct
(di)为剔除环境风影响的雨滴实际下落速度,ddi为第i档和第i-1档雨滴的尺度差。
49.实施例2:
50.本实施例涉及的船用降雨探测装置主体结构如图4所示,包括微波雷达传感器1、姿态传感器2、环境风传感器3、数据处理模块4和保护罩5;微波雷达传感器1、姿态传感器2和环境风传感器3分别与数据处理模块4电连接,微波雷达传感器1、姿态传感器2和数据处理模块4的外侧设置有保护罩5。
51.本实施例涉及的船用降雨探测方法同实施例1。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。