1.本发明涉及室内定位技术领域,尤其涉及一种基于多源信息融合的室内定位方法。
背景技术:
2.在基于位置服务的领域中,全球卫星导航系统(global navigation satellite system,gnss)的覆盖率已超过98%。在室外条件下,米级的定位精度基本可以满足人们的生活需求。然而,在室内条件下,由于卫星信号功率微弱,且室内环境复杂多变、干扰众多,使得基于卫星的定位系统难以保持良好的定位性能。目前关于室内定位的研究虽已十分丰富,但仍难以有效弥补gnss在室内定位中的不足。
3.目前,室内定位服务已涉及人们生活的方方面面,一种可靠的室内定位技术已成为人们当下生活的迫切需求。自2005年以来,关于室内定位的研究开始呈现明显增长趋势。相关研究方向大体上可分为基于无线网络的室内定位技术、基于惯性传感器的室内定位技术、多源信息融合的室内定位技术。
4.基于无线网络的室内定位技术通过无线信号构建的无线网络来完成室内定位,例如红外线、超声波、超宽带、射频识别(radio frequency identification,rfid)、zigbee、蓝牙、wi-fi等定位技术。其中逐年普及的wi-fi信号越来越成为室内定位的研究热点,得到了国内外学者的广泛关注,但由于wi-fi信号存在稳定性低、易受干扰等缺点,其定位结果往往差强人意。基于惯性器件的室内定位技术是以惯性传感器为基础进行的惯性导航,主要包括行人惯性导航系统(pins)和行人航位推算(pdr)两种方式。前者往往要求传感器的精度较高,并且需要通过抑制误差漂移以保证长时间的定位可靠性;后者往往对传感器的精度要求较低,依赖于人行走的特性,通过跨步检测,在行人航向上以步长累积的方式更新行人位置。相比于pins,pdr往往能够在成本有限的条件下,实现更好的定位效果,获得更高的成本效益。但pdr定位系统通常只能够提供较为理想的短中期定位,而难以保证长期运行,此外,初始位置的获取也往往需要其他定位系统提供支持。
技术实现要素:
5.本发明主要解决现有的室内定位技术中存在的超宽带(uwb)定位技术因成本太高而无法推广以及wi-fi定位技术因定位精度无法保证而难以普及等技术问题,提出一种基于多源信息融合的室内定位方法,利用智能手机采集的行人运动数据、室内环境中wi-fi信号的强度,得到的初始定位位置,并利用粒子滤波方法,实现与地图信息的融合,依靠实际的地图信息优化解算的定位结果,能够使得最终定位结果更加符合实际,提高定位结果的准确性。
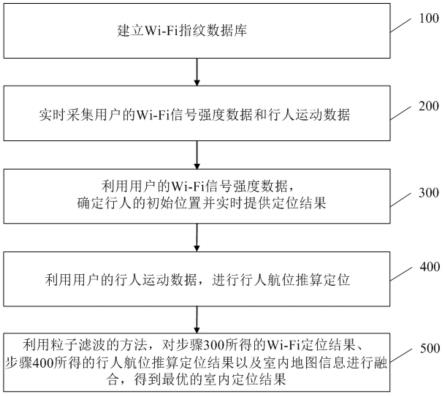
6.本发明提供了一种基于多源信息融合的室内定位方法,包括以下过程:
7.步骤100,建立wi-fi指纹数据库,所述wi-fi指纹是wi-fi的一组信号强度;
8.步骤200,实时采集用户的wi-fi信号强度数据和行人运动数据;
9.步骤300,利用用户的wi-fi信号强度数据,确定行人的初始位置并实时提供定位结果;
10.步骤301,将用户的wi-fi信号强度数据与wi-fi指纹数据库进行在线位置匹配,先进行位置粗查询,确定行人所在区域,得到该区域下采集的wi-fi指纹数据;
11.步骤302,基于加权欧氏距离的wknn算法进行wi-fi指纹位置精确匹配,进而确定行人的初始位置;
12.步骤400,利用用户的行人运动数据,进行行人航位推算定位;
13.步骤401,根据用户的行人运动数据,并将步骤300确定的行人的初始位置作为行人行位推算的初始位置,通过madgwick ahrs算法将加速度计与磁力计融合进行姿态解算,从而得到手机的俯仰角、横滚角、航向角,进而确定行人航向角;
14.步骤402,通过解算出的手机姿态的俯仰角与横滚角,进行手机与行人之间的坐标系转换,通过得到的行人的三轴加速度进行行人步态分析,并在z轴加速度峰值检测的基础上利用动态时间规整算法进行跨步检测,将有效地过滤非正常跨步动作,而得到行人跨步;
15.步骤403,最后以z轴数据为基础,选用非线性步长模型,解算行人跨步步长,实现行人航位定位推算;
16.步骤500,利用粒子滤波的方法,对步骤300所得的wi-fi定位结果、步骤400所得的行人航位推算定位结果以及室内地图信息进行融合,得到最优的室内定位结果;
17.步骤501,获取已知的室内地图信息,将室内地图信息中的门和墙抽象为具体的点和线,得到室内地图抽象结果;
18.步骤502,采用粒子滤波方法,将步骤300中确定的行人的初始位置、步骤400中得到的行人航位推算定位结果和室内地图信息融合在一起,从而得到最优的室内定位结果。
19.进一步的,在步骤100中,建立wi-fi指纹数据库,包括:
20.利用测试的智能手机进行wi-fi扫描,以采集室内环境中不同位置的信号强度,得到信号强度集,建立离线的wi-fi指纹数据库。
21.进一步的,在步骤200中,所述行人运动数据包括:由陀螺仪采集的横滚角、俯仰角和航向角,由磁力计采集的磁场方向和磁偏角,由加速度计采集的行人运动的三轴加速度。
22.进一步的,步骤501,包括步骤5011至步骤5013:
23.步骤5011,将一个室内地图抽象为点和线,其将作为室内地图信息与wi-fi定位结果和行人航位推算定位结果进行融合;
24.步骤5012,在室内地图抽象结果中,基于粒子滤波的轨迹中判断粒子是否穿墙,包括:b1b2表示抽象的墙体,a1、a2表示粒子经过迭代前后的位置坐标,o为坐标原点;若两向量不平行,则其所在的直线必相交;若其相交点在a1a2和b1b2上,则可证明粒子穿墙;
25.由向量加法定理可得:其中,la与lb为常量,则可以解算出:得到粒子穿墙判断方法:若0<la<1且0<lb<1,则可得a1a2和b1b2相交,表示粒子穿墙;否则,粒子未穿墙;
26.步骤5013,当检测到粒子穿墙,粒子的权值得到更新并以新粒子的加权平均作为
位置的校正结果。
27.进一步的,步骤502,包括步骤5021至步骤5022:
28.步骤5021,步骤400中得到的行人航位推算定位结果可作为对位置的预测量;
29.步骤5022,通过将步骤300中确定的行人的初始位置作为位置的第一观测量和步骤501中得到的地图信息可作为第二观测量,对步骤5021中的预测结果的粒子权重进行更新,从而实现对观测量与预测结果的融合,获取更加合理的后验概率密度,从而获取期望结果。
30.本发明提供的一种基于多源信息融合的室内定位方法,通过将智能手机中集成的加速度计、陀螺仪和磁力计等传感器采集的行人运动数据、室内环境中wi-fi信号的强度得到的初始定位位置,并利用粒子滤波的方法,实现与地图信息的融合,依靠实际的地图信息优化解算的定位结果,提高定位结果的准确性,表现出了良好的定位性能,增强定位系统的长期可靠性,为室内定位研究提供廉价、普适、高精度的解决方案,对于我国的室内定位技术的发展具有非常重要的现实意义。
附图说明
31.图1为本发明提供的基于多源信息融合的室内定位方法的实现流程图;
32.图2为本发明提供的基于多源信息融合的室内定位方法中wi-fi指纹定位原理示意图;
33.图3为本发明提供的基于多源信息融合的室内定位方法中pdr位置更新示意图;
34.图4为本发明提供的基于多源信息融合的室内定位方法中室内地图抽象结果;
35.图5为本发明提供的基于多源信息融合的室内定位方法中粒子穿墙示意图;
36.图6为本发明提供的基于多源信息融合的室内定位方法中检测粒子轨迹是否穿墙的线段相交示意图;
37.图7为本发明提供的基于多源信息融合的室内定位方法中轨迹偏移校正示意图;
38.图8为本发明提供的基于多源信息融合的室内定位方法中粒子滤波流程示意图。
具体实施方式
39.为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部内容。
40.如图1所示,本发明实施例提供的基于多源信息融合的室内定位方法,包括以下过程:
41.步骤100,建立wi-fi指纹数据库,所述wi-fi指纹是wi-fi的一组信号强度。
42.利用测试的智能手机进行wi-fi扫描,以采集室内环境中不同位置的信号强度,得到信号强度集,建立离线的wi-fi指纹数据库。在wi-fi信号覆盖的室内环境中存在多个无线接入点(ap),室内环境中某一点接收的多个无线ap的不同信号强度可构成一组wi-fi指纹。
43.本步骤主要对当前环境中已部署的无线ap进行扫描,获取当前采样位置处不同无
线ap的接收信号强度(rssi),并按照一定的格式将接收信号强度集与位置坐标一同存入wi-fi指纹数据库。如图2所示,离线采集阶段将收集大量的wi-fi指纹以建立数据库,其中,wi-fi指纹数据具体存储格式为:
44.,
45.其中,(xn,yn)为第n个位置的坐标,mac
max_n
为第n个采样位置采集到最强rssi的无线ap对应的mac地址(media access control address,局域网地址),为第n个采样位置对应的指纹,m=8。
46.步骤200,实时采集用户的wi-fi信号强度数据和行人运动数据。
47.本步骤利用用户的智能手机进行数据采集,所述智能手机中集成wi-fi接收器、加速度计、陀螺仪和磁力计。
48.所述行人运动数据包括:由陀螺仪采集的横滚角、俯仰角和航向角,由磁力计采集的磁场方向和磁偏角,由加速度计采集的行人运动的三轴加速度。
49.在采集数据之前,可以对智能手机的加速度计、陀螺仪和磁力计进行校准,包括:
50.利用改进的六位置法对加速度计实现在不需要专业仪器的条件下的有效校准,具体的,将加速度计各敏感轴正反方向利用旋转矩阵分别与重力加速度严格对齐并测量各轴的加速度,再将测得的六个位置对应的加速度带入加速度计误差模型求出对应的误差参数,从而实现对加速度计的校准;
51.利用将智能手机静止一段时间后求取的均值作为陀螺仪的零偏误差的方法对陀螺仪进行零偏校准;
52.利用磁力计的误差模型对磁力计进行椭球拟合校准;
53.步骤300,利用用户的wi-fi信号强度数据,确定行人的初始位置并实时提供定位结果。
54.步骤301,将用户的wi-fi信号强度数据与wi-fi指纹数据库进行在线位置匹配,先进行位置粗查询,确定行人所在区域,得到该区域下采集的wi-fi指纹数据;
55.具体的,先通过在线实时扫描可用无线ap来获取当前位置对应的rssi数据,再通过一定的匹配算法将该条件下所获取的wi-fi指纹与指纹库中的指纹进行匹配,最终获得对应的位置信息。具体实现方式如下:
56.粗查询阶段以实时采集到的rssi信号中最强的3个依次查询指纹库中的mac地址,查询出所有满足条件的指纹数据。
57.步骤302,基于加权欧氏距离的wknn算法(weighted k nearest neighborhood,加权k临近算法)进行wi-fi指纹位置精确匹配,进而确定行人的初始位置。具体过程如下:
58.通过实时采集待测点的rssi特征向量与指纹数据库中的指纹进行对比,求取其欧式距离,欧式距离越小,待测点距离该指纹位置越近的可能性越大,以相应的欧氏距离的倒数作为权值,即最终位置的估计式为
59.同时,该算法不仅考虑了指纹匹配的距离问题,还考虑了不同信号强度的置信度,认为信号强度越强其置信度越高。基于信号强度的权重可表示为加权后待测点的rssi特征向量与指纹库中的指纹之间的空间距离为其中,disn为两特征向量之间的欧氏距离,表示第i个待测点在当前时刻采集到第m个ap对应的rssi值,表示第n个指纹数据中第m个ap所对应的rssi值。
60.上述步骤301-302作为wi-fi指纹定位过程。
61.步骤400,利用用户的行人运动数据,进行行人航位推算定位。
62.步骤401,根据用户的行人运动数据,并将步骤300确定的行人的初始位置作为行人行位推算的初始位置,通过madgwick ahrs算法将加速度计与磁力计融合进行姿态解算,从而得到手机的俯仰角、横滚角、航向角,进而确定行人航向角。
63.由于行人航向角与手机航向角相同,因此可以确定行人航向角。
64.步骤402,通过解算出的手机姿态的俯仰角与横滚角,进行手机与行人之间的坐标系转换,通过得到的行人的三轴加速度进行行人步态分析,并在z轴加速度峰值检测的基础上利用动态时间规整算法进行跨步检测,将有效地过滤非正常跨步动作,而得到行人跨步;
65.在本步骤中,由于行人手持手机的随意性,在获取行人步态的三轴加速度特征时,需要利用旋转矩阵将手机坐标系中的加速度转换到身体坐标系下。
66.步骤403,最后以z轴数据为基础,选用非线性步长模型,解算行人跨步步长,实现行人航位定位推算;
67.harvey weinberg提出的非线性步长模型:
68.其中,sl为步长,a
max
和a
min
分别表示行人纵向加速度的最大值和最小值,k表示单位转换的常数。
69.上述步骤401-403作为行人航位推算定位过程。
70.如图3所示,pdr位置更新原理可解释为:假设一行人k步时的位置为pk=(xk,yk),则k 1时刻的位置p
k 1
=(x
k 1
,y
k 1
)可表示为其中,步长为slk,航向角为ψk。通过步骤302所述方法对采集到的行人运动数据结合算法和模型进行解算,从而实现对行人的航位推算。
71.步骤500,利用粒子滤波的方法,对步骤300所得的wi-fi定位结果、步骤400所得的行人航位推算定位结果以及室内地图信息进行融合,得到最优的室内定位结果。具体包括如下过程:
72.步骤501,获取已知的室内地图信息,将室内地图信息中的门和墙抽象为具体的点和线,得到室内地图抽象结果。具体实现方法如下:
73.步骤5011,将一个室内地图抽象为点和线,其将作为室内地图信息与wi-fi定位结
果和行人航位推算定位结果进行融合。
74.如图4所示,是一个室内地图抽象为点和线的实例。
75.步骤5012,在室内地图抽象结果中,基于粒子滤波的轨迹中判断粒子是否穿墙。
76.在室内地图抽象结果中,由于行人定位的结果往往与其真实位置有所出入,因此在地图上常常会出现定位点进入墙体或轨迹穿过墙体等情况,本发明将其统一归结为轨迹穿墙问题。
77.具体的,参照图5,行人沿hi方向行走,由于航向的偏移,经过迭代的粒子会出现部分粒子(图中填充为白色的粒子)落入墙体内的情况,这部分粒子的存在是不切实际的,因为行人不可能进入墙体。如果给粒子分配权值,其权值应当为零。
78.避免轨迹穿墙的问题核心是如何检测轨迹穿墙,即在基于粒子滤波的轨迹中如何判断粒子是否穿墙。由步骤中将地图信息抽象为具体的点和线,这些连线皆为实际中墙体的轮廓,此外,粒子迭代前后对应的粒子之间也可连接为直线。这样,判断粒子是否穿墙的问题,便可以转化为行人前后两步对应粒子的连线是否与墙体抽象的直线相交的问题。如图6所示,b1b2表示抽象的墙体,a1、a2表示粒子经过迭代前后的位置坐标,o为坐标原点。若两向量不平行,则其所在的直线必相交。若其相交点在a1a2和b1b2上,则可证明粒子穿墙。
79.由向量加法定理可得:其中,la与lb为常量,则可以解算出:得到粒子穿墙判断方法:若0<la<1且0<lb<1,则可得a1a2和b1b2相交,即粒子穿墙;否则,粒子未穿墙。
80.步骤5013,当检测到粒子穿墙,粒子的权值得到更新并以新粒子的加权平均作为位置的校正结果。
81.具体的,虽然通常校正后的位置更加合理,但在持续的航向偏移条件下即使有地图的限制,也会在门或岔路等位置出现较大误差。所以,本发明希望通过如地图信息这样不受任何外界环境干扰的信息源弥补融合陀螺仪与磁力计的航向估计在实际应用中仍旧存在的不足。如图7所示为通过轨迹穿墙检测校正的轨迹所产生的偏移角度示意图。hi为行人行走方向;p0到p3为经过粒子滤波及穿墙校正的轨迹;hj为校正轨迹在三步距离上的相对方向;δψ为轨迹校正前后所产生的相对角度。其中,δψ在很大的程度上能够反映航向误差,本发明也将通过此角度并在满足直线行走的条件下来对航向进行再校正。此外,为了避免过校正,还需要满足三步中穿墙粒子依次增多的条件,校正公式为ψ
k 1
=ψk ψk′
1
,ψk′
1
应满足其中,ψk′
表示第k步需要校正的角度;ψk表示第k步校正的航向角;k为常数,表示误差系数;f
line
为直线行走的判断标志位;wk表示第k步对应的所有粒子权值之和。δψ可表示为
82.关于直线行走检测,可通过航向的方差进行判定,直线行走条件下,航向角通常较为稳定,方差较小,而转角时的方差将会急剧增大,本发明将以方差为8deg2作为阈值,若以
三步长为时间窗的航向角方差小于8deg2,则判定为直线行走。至此,步骤302中所提出的航向角问题,已可完全解决。
83.步骤502,采用粒子滤波方法,将步骤300中确定的行人的初始位置、步骤400中得到的行人航位推算定位结果和室内地图信息融合在一起,从而得到最优的室内定位结果。
84.具体的,粒子滤波通过粒子集来表示概率,每个粒子代表行人可能的位置和方向,且每个粒子都包含一个权重值,该值代表了基于迄今为止所有信息的正确概率;对于地图中定位结果通常难以用特定的概率分布来具体表示的问题,粒子滤波通过蒙特卡洛采样的方式以散布的粒子求均值的方式进行了解决。参照图8,具体实现方法如下:
85.步骤5021,步骤400中得到的行人航位推算定位结果可作为对位置的预测量。
86.在第k步时刻,其可表示为pk=(xk,yk),其中xk、yk表示定位点在地图中的坐标,以slk、ψk分别表示第k步时的步长和航向角。于是,基于粒子滤波的行人航位推算状态转移方程可表示为:
[0087][0088]
其中,表示第k步时的第i个粒子,i∈(1,n),n为粒子总数;表示第k步时的第i个粒子,i∈(1,n),n为粒子总数;分别表示第k步第i个粒子在x轴和y轴方向所产生的误差。
[0089]
经过状态转移后,k步时pk的概率密度函数可表示为:
[0090][0091]
此时,与k-1步相比,k步时粒子位置发生改变,但权值保持不变。
[0092]
步骤5022,通过将步骤300中确定的行人的初始位置作为位置的第一观测量和步骤501中得到的地图信息可作为第二观测量,对步骤5021中的预测结果的粒子权重进行更新,从而实现对观测量与预测结果的融合,获取更加合理的后验概率密度,从而获取期望结果。
[0093]
wi-fi指纹定位在第k步的定位结果可表示为p
w,k
=(x
w,k
,y
w,k
),其误差qw服从均值为零的二维正态分布,可由fw(σ)表示,以地图信息为观测量的概率密度可由fd(p)表示,得到融合后最终的后验概率密度函数为
[0094][0095]
通过后验概率下粒子的加权平均,可得到最优的融合结果,从而实现更为准确的定位。
[0096]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。