1.本发明公开了一种全视角步态数据采集中的行人行走轨迹确定方法及系统,属于步态数据采集技术领域。
背景技术:
2.步态为自然人的生物学特性和行为特性,反映了身体体形在时空中的变化规律。步态识别是通过人的走路方式识别人的身份的方法。与其他生物识别技术相比,步态识别具有非接触远距离和不容易伪装等优点。
3.步态数据采集是步态识别系统构建的重要环节。现有步态数据采集方法一般在一个较大的场地上,规定行人直线往返行走,同时布置相机使其在以行人为中心的半圆上等间隔分布,从而采集全部视角的步态数据,如图7所示。然而,该方法在设计场地和行人路线的过程中,对场地大小、相机布置、行人路线等因素没有进行充分深入考虑,导致场地空间、相机利用、行人视角等存在冗余,在场地大小受限的情况下适用性不够,同时设备成本较高;而且该方法只能在某一组确定参数(相机视场角、相机高度、行人身高、行走长度等)下通过手工调试的方式给出相应的设计方案,在不同现场条件下的适应性不足。
技术实现要素:
4.本技术的目的在于,提供一种全视角步态数据采集中的行人行走轨迹确定方法及系统,以解决现有采集方法存在的采集设备布置位置不合理导致的占用场地空间大、行人视角冗余的技术问题。
5.本发明的第一方面提供了一种全视角步态数据采集中的行人行走轨迹确定方法,包括:
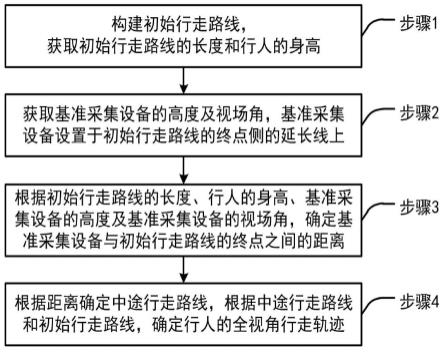
6.步骤1、构建初始行走路线,获取所述初始行走路线的长度和行人的身高;
7.步骤2、获取基准采集设备的高度及视场角,所述基准采集设备设置于所述初始行走路线的终点侧的延长线上;
8.步骤3、根据所述初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定所述基准采集设备与所述初始行走路线的终点之间的距离;
9.步骤4、根据所述距离确定中途行走路线,根据所述中途行走路线和所述初始行走路线,确定所述行人的全视角行走轨迹。
10.优选地,根据所述距离确定中途行走路线,根据所述中途行走路线和所述初始行走路线,确定所述行人的全视角行走轨迹,具体包括:
11.步骤41、以所述初始行走路线的中心点为圆心,将所述初始行走路线按照第一方向旋转第一角度,得到中途行走路线;所述第一方向可为顺时针方向或者逆时针方向;
12.所述第一角度为根据预设视角和所述距离确定的;
13.所述预设视角为所述中途行走路线的第一端点处的视角,所述第一端点距所述初始行走路线的起点的距离小于其距所述初始行走路线的终点的距离;
14.步骤42、判断所述中途行走路线的至少一个端点的视角是否大于预设阈值,如是,则所述初始行走路线及所述中途行走路线组成的轨迹即为所述行人的全视角行走轨迹;
15.如否,则将当前所述中途行走路线的最大视角作为预设视角,重复步骤41及步骤42,构建下一条中途行走路线,直至所构建的中途行走路线的至少一个端点的视角大于预设阈值。
16.优选地,所述初始行走路线及所述中途行走路线组成的轨迹即为所述行人的全视角行走轨迹,具体包括:
17.将所述初始行走路线记为当前路线;
18.判断所述当前路线按照所述第一方向旋转时是否有相邻的中途行走路线,如有,则确定所述中途行走路线的起点及终点,将所述中途行走路线记为当前路线,重复该步骤,如无,则由所述初始行走路线、所述当前路线及所述初始行走路线按照所述第一方向旋转至所述当前路线时经过的所有中途行走路线组成的轨迹为所述行人的全视角行走轨迹。
19.优选地,所述确定所述中途行走路线的起点及终点,具体包括:
20.将所述中途行走路线的一个端点记为起点,所述中途行走路线的起点距其按照第二方向旋转时经过的相邻路线的终点的距离小于其按照第二方向旋转时经过的相邻路线的起点的距离;
21.所述第二方向与所述第一方向相反。
22.优选地,在根据所述距离确定中途行走路线,根据所述中途行走路线和所述初始行走路线,确定所述行人的全视角行走轨迹之后,还包括:
23.步骤5、获取所述中途行走路线的数量,根据所述中途行走路线的数量确定可增加的采集设备的数量;
24.步骤6、获取待增加采集设备的数量,所述待增加采集设备的数量小于或等于所述可增加的采集设备的数量;
25.步骤7、根据所述中途行走路线和所述初始行走路线,确定待增加的采集设备的位置及所述行人的全视角行走轨迹。
26.优选地,根据所述中途行走路线和所述初始行走路线,确定待增加的采集设备的位置,具体包括:
27.步骤71、获取与所述初始行走路线之间的夹角角度最大的所述中途行走路线;
28.步骤72、将所述中途行走路线与基准位置构成三角形,以所述中途行走路线的中心点为旋转中心,按照第二方向旋转第二角度,则旋转后的所述基准位置为待增加的第一采集设备的位置;所述第二角度为与所述初始行走路线之间的夹角角度最大的所述中途行走路线与其相邻的路线之间的夹角角度;所述基准位置为所述基准采集设备的位置;
29.此时,所述行人的全视角行走轨迹为删除与所述初始行走路线之间的夹角角度最大的所述中途行走路线后的其余所述中途行走路线与所述初始行走路线组成的轨迹;
30.步骤73、判断是否还有待增加的采集设备,如有,则将所述第一采集设备的位置记为基准位置,重复步骤71至步骤73,如无,则根据步骤72得到所述行人的全视角行走轨迹。
31.优选地,根据所述初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定所述基准采集设备与所述初始行走路线的终点之间的距离,具体包括:
32.步骤31、根据所述初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定所述基准采集设备的俯角;
33.步骤32、根据所述俯角确定所述基准采集设备与所述初始行走路线的终点之间的距离。
34.优选地,根据所述初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定所述基准采集设备的俯角,具体包括:
35.根据第一公式确定所述基准采集设备的俯角,所述第一公式为:
[0036][0037]
式中,θc为所述基准采集设备的俯角,h为基准采集设备的高度,h为行人的身高,l为初始行走路线的长度,θv为基准采集设备的视场角。
[0038]
优选地,根据所述俯角确定所述基准采集设备与所述初始行走路线的终点之间的距离,具体包括:
[0039]
根据第二公式确定所述基准采集设备与所述初始行走路线的终点之间的距离,所述第二公式为:
[0040][0041]
式中,d为所述基准采集设备与所述初始行走路线的终点之间的距离,θc为所述基准采集设备的俯角,h为基准采集设备的高度,l为初始行走路线的长度,θv为基准采集设备的视场角。
[0042]
本发明的第二方面提供了一种全视角步态数据采集中的行人行走轨迹确定系统,包括:
[0043]
第一参数获取模块,所述第一参数获取模块用于构建初始行走路线,确定所述初始行走路线的长度和行人的身高;
[0044]
第二参数获取模块,所述第二参数获取模块用于获取基准采集设备的高度及视场角,所述基准采集设备设置于所述初始行走路线的终点侧的延长线上;
[0045]
距离确定模块,所述距离确定模块用于根据所述初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定所述基准采集设备与所述初始行走路线的终点之间的距离;
[0046]
轨迹确定模块,所述轨迹确定模块用于根据所述距离确定中途行走路线,根据所述中途行走路线和所述初始行走路线,确定所述行人的全视角行走轨迹。
[0047]
本发明的全视角步态数据采集中的行人行走轨迹确定方法及系统,相较于现有技术,具有如下有益效果:
[0048]
本发明能以最少采集设备,实现无冗余的全视角采集,且占用场地空间小。进一步地,本发明的方法及系统根据采集设备、行人等参数即可自动确定所需场地大小、采集设备位置及对应的行走路径,在不同现场条件下的适应性更强。
附图说明
[0049]
图1为本发明实施例中全视角步态数据采集中的行人行走轨迹确定方法的流程示意图;
[0050]
图2为本发明实施例中正面视角下,行人全身显示在相机视野中行走l距离时,采集设备的位置和姿态示意图;
[0051]
图3为本发明实施例中利用基准采集设备确定行人的全视角行走轨迹时场地的俯视图;
[0052]
图4为本发明实施例中利用基准采集设备和一个待增加采集设备确定行人的全视角行走轨迹时场地的俯视图;
[0053]
图5为本发明实施例中利用基准采集设备和两个待增加采集设备确定行人的全视角行走轨迹时场地的俯视图;
[0054]
图6为本发明实施例中全视角步态数据采集中的行人行走轨迹确定系统的结构示意图;
[0055]
图7为现有技术中步态数据采集方法的示意图。
[0056]
图中101为第一参数获取模块;102为第二参数获取模块;103为距离确定模块;104为轨迹确定模块。
具体实施方式
[0057]
以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
[0058]
本发明的第一方面提供了一种全视角步态数据采集中的行人行走轨迹确定方法,其流程如图1所示,包括:
[0059]
步骤1、构建初始行走路线,获取初始行走路线的长度l和行人的身高h。
[0060]
本发明实施例中的初始行走路线的长度l为至少需要行走该长度才能走出正常的步态的长度。
[0061]
步骤2、获取基准采集设备的高度h及视场角θv,基准采集设备设置于初始行走路线的终点侧的延长线上。
[0062]
步骤3、根据初始行走路线的长度l、行人的身高h、基准采集设备的高度h及基准采集设备的视场角θv,确定基准采集设备与初始行走路线的终点之间的距离d,具体包括:
[0063]
步骤31、根据初始行走路线的长度l、行人的身高h、基准采集设备的高度h及基准采集设备的视场角θv,利用公式(1)确定基准采集设备的俯角θc:
[0064][0065]
步骤32、根据俯角θc确定基准采集设备与初始行走路线的终点之间的距离d,具体包括:
[0066]
根据公式(2)确定基准采集设备与初始行走路线的终点之间的距离d:
[0067][0068]
根据公式(2)即可确定正面视角下,行人全身显示在基准采集设备中行走距离l时,基准采集设备的位置和姿态,如图2所示。
[0069]
步骤4、根据距离确定中途行走路线,根据中途行走路线和初始行走路线,确定行人的全视角行走轨迹。
[0070]
本发明实施例中,以基准采集设备为例说明确定行人的全视角行走轨迹的过程,其示意图如图3所示,图3中的初始行走路线为ab,且a为起点,b为终点,则步骤4具体包括:
[0071]
步骤41、以初始行走路线ab的中心点p为圆心,将初始行走路线ab按照第一方向旋转第一角度,得到中途行走路线cd。本发明中的第一方向可为顺时针方向或者逆时针方向。为阐述方便,后续实施例中的第一方向均指代逆时针方向。
[0072]
本发明实施例中的第一角度为根据预设视角和距离d确定的。其中,预设视角为中途行走路线的第一端点处的视角,该第一端点距初始行走路线的起点的距离小于其距初始行走路线的终点的距离;即本发明实施例中的预设视角为d点处的视角。初始的预设视角为小于20
°
的视角,本发明实施例中初始的预设视角(即d处的视角)
[0073]
根据初始的预设视角,即可利用公式(3)确定第一角度θ:
[0074][0075]
在确定了第一角度后,即可利用公式(4)确定c点的视角
[0076][0077]
步骤42、判断中途行走路线的至少一个端点的视角是否大于预设阈值,如是,则初始行走路线及中途行走路线组成的轨迹即为行人的全视角行走轨迹;
[0078]
如否,则将当前中途行走路线的最大视角作为预设视角,重复步骤41及步骤42,构建下一条中途行走路线,直至所构建的中途行走路线的至少一个端点的视角大于预设阈值。
[0079]
其中,初始行走路线及中途行走路线组成的轨迹即为行人的全视角行走轨迹,具体包括:
[0080]
将初始行走路线记为当前路线;
[0081]
判断当前路线按照第一方向旋转时是否有相邻的中途行走路线,如有,则确定中途行走路线的起点及终点,然后将中途行走路线记为当前路线,重复该步骤,如无,则由初始行走路线、当前路线及初始行走路线按照第一方向旋转至当前路线时经过的所有中途行走路线组成的轨迹为行人的全视角行走轨迹。
[0082]
优选地,确定中途行走路线的起点及终点,具体包括:
[0083]
将中途行走路线的一个端点记为起点,中途行走路线的起点距其按照第二方向旋转时经过的相邻路线的终点的距离小于其按照第二方向旋转时经过的相邻路线的起点的
距离。其中第二方向与第一方向相反。
[0084]
本发明实施例中,c点的视角及d点处的视角均未超过预设阈值90
°
,因此将c点的视角作为预设视角,代入至公式(3)中确定下一条中途行走路线的旋转角度,得到中途行走路线ef。由于中途行走路线cd顺时针旋转时,经过的相邻路线为初始行走路线ab,初始行走路线ab中b为终点,而中途行走路线cd中c距离b更近,因此,c作为起点,d作为终点,同样地,中途行走路线ef中,e距离终点d更近,因此e为起点,f为终点。得到中途行走路线ef后,e处的视角等于c处的视角相应的,根据公式(4)即可确定f处的视角由于f处的视角大于预设阈值90
°
,故,无需构建下一条中途行走轨迹。则行人的全视角行走轨迹为a
→b→c→d→e→
f。
[0085]
进一步地,本发明可通过增加采集设备的方式简化行人的行走轨迹,具体为:
[0086]
在步骤4根据距离确定中途行走路线,根据中途行走路线和初始行走路线,确定行人的全视角行走轨迹之后,还包括:
[0087]
步骤5、获取中途行走路线的数量,根据中途行走路线的数量确定可增加的采集设备的数量。
[0088]
本发明实施例中,中途行走路线的数量为2个,故可增加的采集设备的数量为2台。
[0089]
步骤6、获取待增加采集设备的数量,待增加采集设备的数量小于或等于可增加的采集设备的数量。
[0090]
步骤7、根据中途行走路线和初始行走路线,确定待增加的采集设备的位置及行人的全视角行走轨迹,具体包括:
[0091]
步骤71、获取与初始行走路线之间的夹角角度最大的中途行走路线;
[0092]
步骤72、将中途行走路线与基准位置构成三角形,以中途行走路线的中心点为旋转中心,按照第二方向旋转第二角度,则旋转后的基准位置为待增加的第一采集设备的位置;第二角度为与初始行走路线之间的夹角角度最大的中途行走路线与其相邻的中途行走路线之间的夹角角度,基准位置为基准采集设备的位置;
[0093]
此时,行人的全视角行走轨迹为删除与初始行走路线之间的夹角角度最大的中途行走路线后的其余中途行走路线与初始行走路线组成的轨迹;
[0094]
步骤73、判断是否还有待增加的采集设备,如有,则将第一采集设备的位置记为基准位置,重复步骤71至步骤73,如无,则根据步骤72得到行人的全视角行走轨迹。
[0095]
本发明实施例中,当待增加采集设备的数量为1时,确定行人的全视角行走轨迹的过程如图4所示,首先获取与初始行走路线ab之间的夹角角度最大的中途行走路线ef,然后将中途行走路线ef与基准采集设备所在的基准位置o构成三角形,以中途行走路线ef的中心点p为旋转中心,顺时针旋转第二角度,则旋转后的基准位置o1为待增加的第一采集设备的位置;其中第二角度为中途行走路线ef与其相邻的中途行走路线cd之间的夹角角度。
[0096]
此时,中途行走路线ef相对于o等价于中途行走路线cd相对于o1,因此可以简化行人路径,则行人的全视角行走轨迹为删除中途行走路线ef后的其余中途行走路线与初始行走路线组成的轨迹,即行人的全视角行走轨迹为a
→b→c→
d。其中,位于o1处的采集设备的俯角与o处的采集设备的俯角相同,偏向角分别与旋转角相等。
[0097]
本发明实施例中,当待增加采集设备的数量为2时,确定行人的全视角行走轨迹的过程如图5所示,第一采集设备的位置为o1,获取与初始行走路线ab之间的夹角角度最大的
中途行走路线cd(因为中途行走路线ef已经删除),然后将中途行走路线cd与第一采集设备的位置o1构成三角形,以中途行走路线cd的中心点p为旋转中心,顺时针旋转第二角度,则旋转后的基准位置o2为待增加的第二采集设备的位置;其中第二角度为中途行走路线cd与其相邻的初始行走路线ab之间的夹角角度。
[0098]
此时,中途行走路线cd相对于o等价于初始行走路线ab相对于o1,中途行走路线ef相对于o等价于初始行走路线ab相对于o2。行人的全视角行走轨迹为删除中途行走路线cd后的其余中途行走路线与初始行走路线组成的轨迹,即行人的全视角行走轨迹为a
→
b。其中,位于o1处的采集设备和o2处的采集设备的俯角与o处的采集设备的俯角相同,偏向角分别与旋转角相等。
[0099]
本发明对于任意给定场景参数,可自动设计出全视角采集条件下场地最小时各采集设备的位置及对应的行人行走轨迹。相比于传统步态数据采集方案,该方案对所需场地大小和相机数目的要求显著降低,对不同场景参数的适应性大幅提升。
[0100]
本发明的第二方面提供了一种全视角步态数据采集中的行人行走轨迹确定系统,如图6所示,包括第一参数获取模块101、第二参数获取模块102、距离确定模块103和轨迹确定模块104。
[0101]
其中,第一参数获取模块101用于构建初始行走路线,确定初始行走路线的长度和行人的身高;
[0102]
第二参数获取模块102用于获取基准采集设备的高度及视场角,基准采集设备设置于初始行走路线的终点侧的延长线上;
[0103]
距离确定模块103用于根据初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定基准采集设备与初始行走路线的终点之间的距离;
[0104]
轨迹确定模块104用于根据距离确定中途行走路线,根据中途行走路线和初始行走路线,确定行人的全视角行走轨迹。
[0105]
本发明能以最少采集设备,实现无冗余的全视角采集,且占用场地空间小。进一步地,本发明的方法及系统根据采集设备、行人等参数即可自动确定所需场地大小、采集设备位置及对应的行走路径,在不同现场条件下的适应性更强。
[0106]
以上所述,仅是本技术的几个实施例,并非对本技术做任何形式的限制,虽然本技术以较佳实施例揭示如上,然而并非用以限制本技术,任何熟悉本专业的技术人员,在不脱离本技术技术方案的范围内,利用上述揭示的技术内容做出些许的变动或修饰均等同于等效实施案例,均属于技术方案范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。