技术特征:
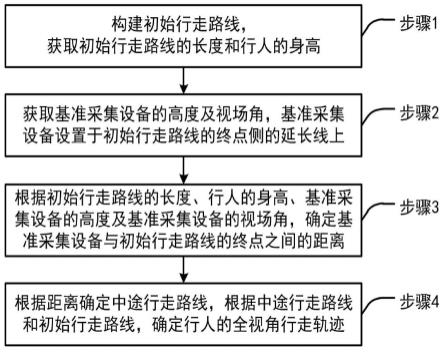
1.一种全视角步态数据采集中的行人行走轨迹确定方法,其特征在于,包括:步骤1、构建初始行走路线,获取所述初始行走路线的长度和行人的身高;步骤2、获取基准采集设备的高度及视场角,所述基准采集设备设置于所述初始行走路线的终点侧的延长线上;步骤3、根据所述初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定所述基准采集设备与所述初始行走路线的终点之间的距离;步骤4、根据所述距离确定中途行走路线,根据所述中途行走路线和所述初始行走路线,确定所述行人的全视角行走轨迹。2.根据权利要求1所述的全视角步态数据采集中的行人行走轨迹确定方法,其特征在于,根据所述距离确定中途行走路线,根据所述中途行走路线和所述初始行走路线,确定所述行人的全视角行走轨迹,具体包括:步骤41、以所述初始行走路线的中心点为圆心,将所述初始行走路线按照第一方向旋转第一角度,得到中途行走路线;所述第一角度为根据预设视角和所述距离确定的;步骤42、判断所述中途行走路线的至少一个端点的视角是否大于预设阈值,如是,则所述初始行走路线及所述中途行走路线组成的轨迹即为所述行人的全视角行走轨迹;如否,则将当前所述中途行走路线的最大视角作为预设视角,重复步骤41及步骤42,构建下一条中途行走路线,直至所构建的中途行走路线的至少一个端点的视角大于预设阈值。3.根据权利要求2所述的全视角步态数据采集中的行人行走轨迹确定方法,其特征在于,所述初始行走路线及所述中途行走路线组成的轨迹即为所述行人的全视角行走轨迹,具体包括:将所述初始行走路线记为当前路线;判断所述当前路线按照所述第一方向旋转时是否有相邻的中途行走路线,如有,则确定所述中途行走路线的起点及终点,将所述中途行走路线记为当前路线,重复该步骤,如无,则由所述初始行走路线、所述当前路线及所述初始行走路线按照所述第一方向旋转至所述当前路线时经过的所有中途行走路线组成的轨迹为所述行人的全视角行走轨迹。4.根据权利要求3所述的全视角步态数据采集中的行人行走轨迹确定方法,其特征在于,所述确定所述中途行走路线的起点及终点,具体包括:将所述中途行走路线的一个端点记为起点,所述中途行走路线的起点距其按照第二方向旋转时经过的相邻路线的终点的距离小于其按照第二方向旋转时经过的相邻路线的起点的距离;所述第二方向与所述第一方向相反。5.根据权利要求2-4任一项所述的全视角步态数据采集中的行人行走轨迹确定方法,其特征在于,在根据所述距离确定中途行走路线,根据所述中途行走路线和所述初始行走路线,确定所述行人的全视角行走轨迹之后,还包括:步骤5、获取所述中途行走路线的数量,根据所述中途行走路线的数量确定可增加的采集设备的数量;步骤6、获取待增加采集设备的数量,所述待增加采集设备的数量小于或等于所述可增
加的采集设备的数量;步骤7、根据所述中途行走路线和所述初始行走路线,确定待增加的采集设备的位置及所述行人的全视角行走轨迹。6.根据权利要求5所述的全视角步态数据采集中的行人行走轨迹确定方法,其特征在于,根据所述中途行走路线和所述初始行走路线,确定待增加的采集设备的位置,具体包括:步骤71、获取与所述初始行走路线之间的夹角角度最大的所述中途行走路线;步骤72、将所述中途行走路线与基准位置构成三角形,以所述中途行走路线的中心点为旋转中心,按照第二方向旋转第二角度,则旋转后的所述基准位置为待增加的第一采集设备的位置;所述第二角度为与所述初始行走路线之间的夹角角度最大的所述中途行走路线与其相邻的路线之间的夹角角度;所述基准位置为所述基准采集设备的位置;此时,所述行人的全视角行走轨迹为删除与所述初始行走路线之间的夹角角度最大的所述中途行走路线后的其余所述中途行走路线与所述初始行走路线组成的轨迹;步骤73、判断是否还有待增加的采集设备,如有,则将所述第一采集设备的位置记为基准位置,重复步骤71至步骤73,如无,则根据步骤72得到所述行人的全视角行走轨迹。7.根据权利要求1所述的全视角步态数据采集中的行人行走轨迹确定方法,其特征在于,根据所述初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定所述基准采集设备与所述初始行走路线的终点之间的距离,具体包括:步骤31、根据所述初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定所述基准采集设备的俯角;步骤32、根据所述俯角确定所述基准采集设备与所述初始行走路线的终点之间的距离。8.根据权利要求7所述的全视角步态数据采集中的行人行走轨迹确定方法,其特征在于,根据所述初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定所述基准采集设备的俯角,具体包括:根据第一公式确定所述基准采集设备的俯角,所述第一公式为:式中,θ
c
为所述基准采集设备的俯角,h为基准采集设备的高度,h为行人的身高,l为初始行走路线的长度,θ
v
为基准采集设备的视场角。9.根据权利要求7所述的全视角步态数据采集中的行人行走轨迹确定方法,其特征在于,根据所述俯角确定所述基准采集设备与所述初始行走路线的终点之间的距离,具体包括:根据第二公式确定所述基准采集设备与所述初始行走路线的终点之间的距离,所述第二公式为:
式中,d为所述基准采集设备与所述初始行走路线的终点之间的距离,θ
c
为所述基准采集设备的俯角,h为基准采集设备的高度,l为初始行走路线的长度,θ
v
为基准采集设备的视场角。10.一种全视角步态数据采集中的行人行走轨迹确定系统,其特征在于,包括:第一参数获取模块,所述第一参数获取模块用于构建初始行走路线,确定所述初始行走路线的长度和行人的身高;第二参数获取模块,所述第二参数获取模块用于获取基准采集设备的高度及视场角,所述基准采集设备设置于所述初始行走路线的终点侧的延长线上;距离确定模块,所述距离确定模块用于根据所述初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定所述基准采集设备与所述初始行走路线的终点之间的距离;轨迹确定模块,所述轨迹确定模块用于根据所述距离确定中途行走路线,根据所述中途行走路线和所述初始行走路线,确定所述行人的全视角行走轨迹。
技术总结
本发明公开了一种全视角步态数据采集中的行人行走轨迹确定方法及系统,方法包括构建初始行走路线,获取初始行走路线的长度和行人的身高;获取基准采集设备的高度及视场角,基准采集设备设置于初始行走路线的终点侧的延长线上;根据初始行走路线的长度、行人的身高、基准采集设备的高度及基准采集设备的视场角,确定基准采集设备与初始行走路线的终点之间的距离;根据距离确定中途行走路线,根据中途行走路线和初始行走路线,确定行人的全视角行走轨迹。本发明能以最少的采集设备,实现无冗余全视角采集,且占用场地空间小。另外本发明可根据采集设备、行人等参数自动确定所需场地大小、采集设备位置及对应的行走路径,在不同现场下的适应性强。现场下的适应性强。现场下的适应性强。
技术研发人员:黄永祯 彭昆福 曹春水
受保护的技术使用者:银河水滴科技(北京)有限公司
技术研发日:2022.06.07
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。