1.本发明属于航天器轨道设计领域,具体涉及面向多目标快速响应任务的轨道设计方法。
背景技术:
2.快速响应空间技术旨在对用户指定的目标点进行快速、及时的成像观测,以提高空间情报能力。比如,当某地发生自然灾害时,要求响应卫星能够在较短的时间内,快速到达受灾点上方,为救灾工作提供地面图像信息支撑。
3.传统的卫星轨道设计任务往往追求对整个地面空间的覆盖,以地面覆盖率、空间分辨率等作为优化指标,进行轨道优化设计。此外,为实现重访或相同的光照条件等特性,常采用回归轨道、太阳同步轨道等。与传统轨道设计任务相比,面向快速响应任务的轨道设计具有应急性、短暂性、和局部性等特点,通常只要求在一段时间内对用户指定的地面目标点进行详细侦察,然而,受详查卫星自身狭窄视场角的限制,要求设计轨道的星下点轨迹能够精确经过目标点。
4.目前,在针对指定地面目标访问的轨道设计任务中,只有针对两个地面目标、三个地面目标的轨道设计方法。然而,考虑到响应卫星的发射成本较高,若在单次发射任务中能够同时访问更多的目标,能够大大提升工作效率,降低任务成本。
技术实现要素:
5.本发明的目的是为了解决现有在针对指定地面目标访问的轨道设计任务中,只有针对两个地面目标、三个地面目标的轨道设计方法的问题,而提出一种面向多目标快速响应任务的轨道设计方法。
6.一种面向多目标快速响应任务的轨道设计方法具体过程为:
7.步骤一、给定任务初始时刻t0、用户指定地面目标点的经、纬度为地心经、纬度k=1,2,3,4,5;
8.通过初始时刻的儒略日计算得到格林尼治平恒星时角α0;
9.步骤二、假设在任务初始时刻t0,设计轨道的星下点轨迹正好经过目标点1,任意给定一个大于所有目标点纬度的倾角i;
10.步骤三、通过目标点1的访问约束,计算得到设计轨道在初始时刻的参数纬度幅角u0、升交点赤经ω;
11.步骤四、通过对第2个目标点第3个目标点第4个目标点的访问约束,计算得到设计轨道的近地点角距ω、离心率e、和瞬时半长轴a;
12.步骤五、对于五个地面目标,通过数值方法求解倾角,基于求解的倾角通过步骤三、步骤四重新确定五个轨道参数,完成5个地面目标单次访问轨道设计;
13.所述五个轨道参数为分别为瞬时半长轴a、离心率e、升交点赤经ω、近地点角距ω、和参数纬度幅角u0;
14.步骤六、对于四个地面目标,通过数值方法求解倾角,基于求解的倾角通过步骤三、步骤四重新确定五个轨道参数,完成4个地面目标重复访问轨道设计;
15.所述五个轨道参数为分别为瞬时半长轴a、离心率e、升交点赤经ω、近地点角距ω、和参数纬度幅角u0。
16.本发明的有益效果:
17.本发明提出了一种面向多目标快速响应任务的轨道设计方法。通过该方法设计轨道的星下点轨迹能够精确通过用户给定的地面目标,实现对五个地面目标点的单次访问,或对四个地面目标点的多次重复访问。本方法中仅考虑j2摄动的影响。
18.在本发明中,可选择4-5个地面目标,超过了之前研究中的2-3个目标。采用本发明方法进行轨道设计,只需要给定任务初始时刻和地面目标点,便可得到星下点轨迹精确经过指定目标的轨道参数。当目标点个数为5时,设计轨道能够经过所有目标点一次;当目标点个数为4时,设计轨道能够多次重复经过所有目标点。
19.本发明根据轨道设计参数与目标访问约束之间的关系分析可知,设计轨道的星下点轨迹最多能单次经过五个地面目标。此外,若只选择四个地面目标,设计轨道的星下点轨迹还能保持回归特性,实现对目标点的多次重复访问。
附图说明
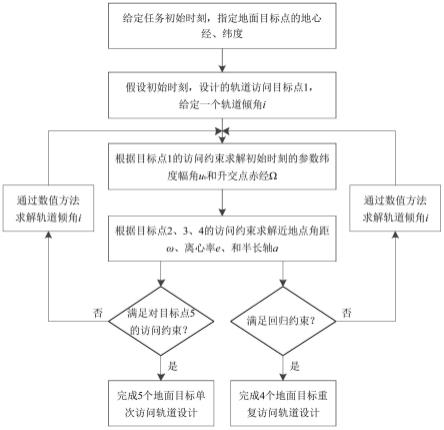
20.图1为本发明方法流程图;
21.图2a为地面单次访问5个目标的轨道星下点轨迹图;
22.图2b为地面重复访问4个目标的轨道星下点轨迹图。
具体实施方式
23.具体实施方式一:本实施方式一种面向多目标快速响应任务的轨道设计方法具体过程为:
24.步骤一、给定任务初始时刻t0、用户指定地面目标点的经、纬度为地心经、纬度k=1,2,3,4,5;
25.通过初始时刻的儒略日计算得到对应的格林尼治平恒星时角α0;
26.步骤二、假设在任务初始时刻t0,设计轨道的星下点轨迹正好经过目标点1,任意给定一个大于所有目标点纬度的倾角i;本文需要求解的未知量为t0时刻的轨道六根数,分别为瞬时半长轴a、离心率e、倾角i、升交点赤经ω、近地点角距ω、和参数纬度幅角u0;注意除了u0外,其它待求解量均无下标。给定一个大于所有目标点纬度的倾角i;
27.步骤三、通过目标点1的访问约束,计算得到设计轨道在初始时刻的参数纬度幅角u0、升交点赤经ω;
28.步骤四、通过对第2个目标点第3个目标点第4个目标点的访问约束,计算得到设计轨道的近地点角距ω、离心率e、和瞬时半长轴a;
29.步骤五、对于五个地面目标,通过数值方法求解合适的倾角,基于求解的倾角通过步骤三、步骤四重新确定五个轨道参数,完成5个地面目标单次访问轨道设计;
30.所述五个轨道参数为分别为瞬时半长轴a、离心率e、升交点赤经ω、近地点角距ω、和参数纬度幅角u0;
31.步骤六、对于四个地面目标,通过数值方法求解合适的倾角,基于求解的倾角通过步骤三、步骤四重新确定五个轨道参数,完成4个地面目标重复访问轨道设计;
32.所述五个轨道参数为分别为瞬时半长轴a、离心率e、升交点赤经ω、近地点角距ω、和参数纬度幅角u0。
33.具体实施方式二:本实施方式与具体实施方式一不同的是,所述步骤三中通过目标点1的访问约束(公式1、公式2),计算得到设计轨道在初始时刻的参数纬度幅角u0、升交点赤经ω;具体过程为:
34.对于一个给定的轨道倾角i,当设计轨道的星下点轨迹经过第1个目标点时,设计轨道的参数纬度幅角u1需满足
[0035][0036]
初始时刻的参数纬度幅角u0=u1,且有u0=ω f0,f0为初始时刻的真近点角,ω为近地点角距;
[0037]
设计轨道的升交点赤经为
[0038]
ω=α0 λ
1-tan-1
(cositanu1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0039]
式(1)(2)中sin-1
(
·
)和tan-1
(
·
)各自的两个值分别对应升轨段访问和降轨段访问。
[0040]
其它步骤及参数与具体实施方式一相同。
[0041]
具体实施方式三:本实施方式与具体实施方式一或二不同的是,所述步骤四中通过对第2个目标点第3个目标点第4个目标点的访问约束,计算得到设计轨道的近地点角距ω、离心率e、和瞬时半长轴a;
[0042]
具体过程为:
[0043]
对第2、3、4个目标点的访问约束为
[0044][0045][0046][0047]
式中,ωe=7.292116
×
10-5
rad/s为地球自转角速度,j2为二阶带谐项摄动系数,j2=1.082627
×
10-3
,re为地球半径,re=6378.137km,μ为地球的引力常数,μ=398600.4415km3/s2,为平半长轴,和分别为j2摄动下升交点赤经、近地点角距和平近点角的变化率,m0为初始时刻的平近点角,mk为访问第k个目标点的平近点角,k=2,3,4;uk为访问第k个目标点的参数纬度幅角,k=2,3,4;nk为访问第k个目标点对应的圈数(对于每一个nk,都需要遍历求解,一般从0遍历到15即可),k=2,3,4;
[0048]
其中,圈数nk可从0开始,逐渐增大遍历搜索,如若要求在1天内访问,则一般从0遍历至15即可;
[0049]
分别联立公式(3)(4)和(4)(5),消去设计轨道的平半长轴a,可得到f1和f2两个非线性方程,其中只含有离心率e和近地点角距ω,
[0050][0051][0052]
式中,f1、f2为中间变量;
[0053]
通过求解非线性方程(6)和(7)的零根,可得到近地点角距ω和离心率e;
[0054]
将求解得到的ω和e带入约束方程(3)(约束方程(3)中包含m0、m2,m0、m2中包含ω和e),即可得到只含有平半长轴的非线性方程,从而通过数值方法(如二分法、割线法等)求解只含有平半长轴的非线性方程的零根得到平半长轴再通过平半长轴和瞬时半长轴a之间的转换,得到初始时刻的瞬时半长轴a(只需初始时刻的瞬时半长轴a)。
[0055]
其它步骤及参数与具体实施方式一或二相同。
[0056]
具体实施方式四:本实施方式与具体实施方式一至三之一不同的是,所述j2摄动下升交点赤经、近地点角距和平近点角的变化率和分别为
[0057][0058]
其它步骤及参数与具体实施方式一至三之一相同。
[0059]
具体实施方式五:本实施方式与具体实施方式一至四之一不同的是,所述参数纬度幅角uk可通过目标点纬度得到,为
[0060][0061]
平近点角m可通过偏近点角e计算得到
[0062][0063]
偏近点角e和真近点角f之间的关系为
[0064][0065]
式中,e0为初始时刻的偏近点角,e2、e3、e4为访问第k个目标点的偏近点角,f0为初始时刻的真近点角,f2、f3、f4为访问第k个目标点的真近点角。
[0066]
其它步骤及参数与具体实施方式一至四之一相同。
[0067]
具体实施方式六:本实施方式与具体实施方式一至五之一不同的是,所述通过求解非线性方程(6)和(7)的零根,可得到近地点角距ω和离心率e;具体求解过程如下:
[0068]
求解二维非线性方程组需要进行迭代,其初值可通过下列步骤计算得到,首先,平近点角,即公式(10),可近似为
[0069][0070]
将公式(12)带入公式(6),整理可得
[0071][0072]
式中,c1、c2为系数,有c1=tan-1
(cositanu2) ω-α
0-λ2,c2=tan-1
(cositanu3) ω-α
0-λ3;
[0073]
将公式(13)带入公式(7),即可得到只含有近地点角距ω的一维非线性方程,可通过数值方法(如二分法、割线法等常见方法)求解只含有近地点角距ω的一维非线性方程的零根,即可得到ω的初值,然后带回公式(13),即可得到离心率e的初值;
[0074]
在此基础上,公式(6)(7)的精确解可通过牛顿迭代计算得到,迭代过程如下
[0075][0076]
式中,j为雅可比矩阵,可通过数值差分近似计算得到,为将[ω,e]n代入公式(6)(7)后得到的值,当小于某一个小量时(如10-6
),迭代结束。
[0077]
其它步骤及参数与具体实施方式一至五之一相同。
[0078]
具体实施方式七:本实施方式与具体实施方式一至六之一不同的是,所述将求解得到的ω和e带入约束方程(3)(约束方程(3)中包含m0、m2,m0、m2中包含e和e0、e2,e0、e2和f0、
f2有关,u0=ω f0,u2=ω f2,所以约束方程(3)中包含e和ω),即可得到只含有平半长轴a的非线性方程,从而通过数值方法(如二分法、割线法等)求解只含有平半长轴a的非线性方程的零根得到平半长轴a,再通过平半长轴a和瞬时半长轴a之间的转换,得到初始时刻的瞬时半长轴a;表达式为:
[0079][0080]
其它步骤及参数与具体实施方式一至六之一相同。
[0081]
具体实施方式八:本实施方式与具体实施方式一至七之一不同的是,所述步骤五中步骤五、对于五个地面目标,通过数值方法求解合适的倾角,基于求解的倾角通过步骤三、步骤四重新确定五个轨道参数,完成5个地面目标单次访问轨道设计;
[0082]
所述五个轨道参数为分别为瞬时半长轴a、离心率e、升交点赤经ω、近地点角距ω、和参数纬度幅角;
[0083]
具体过程为:
[0084]
第5个目标点的访问约束为
[0085][0086]
其中
[0087][0088]
式中,n5为访问第5个目标点的圈数,同样需要遍历搜索;m5为访问第5个目标点的平近点角;u5为访问第5个目标点的参数纬度幅角;e5为访问第5个目标点的偏近点角,f5为访问第5个目标点的真近点角;
[0089]
其中,圈数n5可从0开始,逐渐增大遍历搜索;
[0090]
对于一个给定的轨道倾角i,可通过步骤三、四得到初始时刻的参数纬度幅角u0,升交点赤经ω、近地点角距ω、离心率e、和瞬时半长轴a,因此公式(16)的值仅与倾角i有关,通过数值方法(如二分法、割线法等)求解公式(16)的零点,即可得到对应的轨道倾角i,基于得到的倾角通过步骤三、步骤四重新确定五个轨道参数,完成5个地面目标单次访问轨道设计。
[0091]
其它步骤及参数与具体实施方式一至七之一相同。
[0092]
具体实施方式九:本实施方式与具体实施方式一至八之一不同的是,所述步骤六中步骤六、对于四个地面目标,通过数值方法求解合适的倾角,基于求解的倾角通过步骤三、步骤四重新确定五个轨道参数,完成4个地面目标重复访问轨道设计;
[0093]
所述五个轨道参数为分别为瞬时半长轴a、离心率e、升交点赤经ω、近地点角距ω、和参数纬度幅角;
[0094]
具体过程为:
[0095]
设计轨道的回归约束为
[0096]
ntn=dteꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0097]
式中,tn为交点周期,te为地球相对于轨道面旋转一圈的时间,n和d为两个整数,表示设计轨道在经过d天n圈后实现对目标点的重访,n和d可通过用户指定或者遍历搜索得到,如若要求1天内实现重访,则d应取1,n可在15及以下选择;
[0098]
对于一个给定的轨道倾角i,可通过步骤三、四得到初始时刻的参数纬度幅角u0,升交点赤经ω、近地点角距ω、离心率e、和瞬时半长轴a,因此公式(17)的值仅与倾角i有关。通过数值方法(如二分法、割线法等)求解公式(17)的零点,即可得到对应的i,基于求解的倾角通过步骤三、步骤四重新确定五个轨道参数,完成4个地面目标重复访问轨道设计。
[0099]
其它步骤及参数与具体实施方式一至八之一相同。
[0100]
具体实施方式十:本实施方式与具体实施方式一至九之一不同的是,所述访问第2个目标点的圈数n2、访问第3个目标点的圈数n3、访问第4个目标点的圈数n4、访问第5个目标点的圈数n5从0开始,逐渐增大遍历搜索,如若要求在1天内访问,则一般从0遍历至15即可。
[0101]
其它步骤及参数与具体实施方式一至九之一相同。
[0102]
采用以下实施例验证本发明的有益效果:
[0103]
实施例一:
[0104]
假设任务初始时刻为2022年1月1日00:00:00,对应的格林尼治平恒星时角为α0=1.7563rad,用户指定地面目标点的地心经、纬度如表1所示。
[0105]
表1用户指定目标点的地心经、纬度
[0106][0107]
分别要求对表1中五个目标点进行单次观测,和对表1中前4个目标点进行重复观测。根据本发明设计的轨道参数如表2所示。
[0108]
表2地面多目标访问轨道设计参数
[0109][0110]
两个结果对应的星下点轨迹图如图2a、2b所示,图中五角星表示目标点。图2a显示
了1天的星下点轨迹,可见5个目标能够在1天内实现访问;图2b显示了10天的星下点轨迹,可见设计轨道为回归轨道。在对4个目标进行重复访问轨道设计中,d=1,n=13,即航天器每经过1天13圈后可对4个地面目标进行重复访问。仿真结果表明,通过本发明设计的轨道,其星下点轨迹能够精确通过5个地面目标点,实现单次访问;或多次通过4个地面目标点,实现重复访问。
[0111]
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。