1.本发明涉及压水堆棒位测量技术领域,尤其涉及一种压水堆临界棒位测量方法及测量系统。
背景技术:
2.在核电厂的运行过程中,反应性控制的两大最重要手段是控制棒的移动和硼浓度的变化。其中,主要用于长期、起效慢的反应性控制是通过控制硼浓度的变化来实现;而短期、起效快的反应性控制则是通过对控制棒的移动来经行控制。由于控制棒控制系统是一个开环控制系统,因此在出现故障后如何判断控制棒是否存在失步(不在指令要求的棒位)、对失步做出警告、失步步数多少对于反应堆的控制有着极为重要的意义。
3.目前,国内外核电站的在使用的棒控棒位系统上主要分为三大类。分别是使用二代仪控技术的棒控棒位系统、使用二代加技术的棒控棒位系统以及使用全数字化技术的棒控棒位系统,各类系统特点如下所示:
4.(1)第二代技术:这种系统需要使用大量的元器件和仪器仪表,因此系统规模比较大,运行维护工作非常繁重。
5.(2)第二代加技术:该系统同时采用数字控制技术和模拟控制技术。由于并行结构(冗余设计方案)在数字技术中的广泛应用,它具有很高的可靠性。考虑到核电站的历史运行经验,采用第二代加技术的棒控棒位系统在采用数字控制技术的同时,保留了经验更丰富、安全性更高的模拟技术。
6.(3)第三代技术:系统采用数字技术,电流控制主电路采用嵌入式技术,此外,该系统还广泛采用光纤网络技术、dcs技术和虚拟仪器技术。
7.相较于前两代的控制技术,第三代技术受益于数字技术的进步,其具有检测精度高,效率高等的优点。目前,第三代技术已在国外核电站工程中得到广泛应用,但在国内的相关核电站仍缺乏相应的技术储备,因此,亟需一种采用数字技术的控制棒棒位测量方案,以完善第三代核电技术的国产化进程。
技术实现要素:
8.本发明的目的在于提供一种压水堆临界棒位测量方法及测量系统。
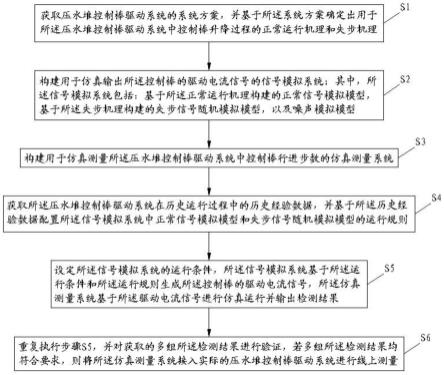
9.为实现上述发明目的,本发明提供一种压水堆临界棒位测量方法,包括:
10.s1.获取压水堆控制棒驱动系统的系统方案,并基于所述系统方案确定出用于所述压水堆控制棒驱动系统中控制棒升降过程的正常运行机理和失步机理;
11.s2.构建用于仿真输出所述控制棒的驱动电流信号的信号模拟系统;其中,所述信号模拟系统包括:基于所述正常运行机理构建的正常信号模拟模型,基于所述失步机理构建的失步信号随机模拟模型,以及噪声模拟模型;
12.s3.构建用于仿真测量所述压水堆控制棒驱动系统中控制棒行进步数的仿真测量系统;
13.s4.获取所述压水堆控制棒驱动系统在历史运行过程中的历史经验数据,并基于所述历史经验数据配置所述信号模拟系统中正常信号模拟模型和失步信号随机模拟模型的运行规则;
14.s5.设定所述信号模拟系统的运行条件,所述信号模拟系统基于所述运行条件和所述运行规则生成所述控制棒的驱动电流信号,所述仿真测量系统基于所述驱动电流信号进行仿真运行并输出检测结果;
15.s6.重复执行步骤s5,并对获取的多组所述检测结果进行验证,若多组所述检测结果均符合要求,则将所述仿真测量系统接入实际的压水堆控制棒驱动系统进行线上测量。
16.根据本发明的一个方面,步骤s1中,所述系统方案包括:所述压水堆控制棒驱动系统的结构方案和所述压水堆控制棒驱动系统的升降步进方案;其中,所述结构方案包括:用于所述控制棒的驱动结构和用于控制所述驱动结构运行的驱动电路;
17.所述驱动结构包括:沿控制棒轴向布置的移动夹具和固定夹具,与所述移动夹具相对应的移动夹具线圈,与所述固定夹具相对应的固定夹具线圈,以及提升线圈;
18.沿所述控制棒轴向且由上至下的方向,所述提升线圈、所述移动夹具线圈和所述固定夹具线圈依次设置;
19.所述驱动电路分别与所述提升线圈、所述移动夹具线圈和所述固定夹具线圈相连接,用于向所述提升线圈、所述移动夹具线圈和所述固定夹具线圈分别输出驱动电流信号;
20.所述升降步进方案包括:提升动作方案和插入动作方案;其中,所述提升动作方案包括用于提升所述控制棒时所述提升线圈、所述移动夹具线圈和所述固定夹具线圈的运行顺序;所述插入动作方案包括用于插入所述控制棒时所述提升线圈、所述移动夹具线圈和所述固定夹具线圈的运行顺序。
21.根据本发明的一个方面,在步骤s1中,基于所述系统方案确定出用于所述压水堆控制棒驱动系统中控制棒升降过程的正常运行机理和失步机理的步骤中,包括:
22.基于所述结构方案和所述升降步进方案获取所述提升线圈、所述移动夹具线圈和所述固定夹具线圈在所述控制棒升降控制中驱动电流信号的信号时序;
23.基于所述信号时序确定出所述移动夹具线圈和所述固定夹具线圈在正常运行状态下驱动电流信号的变化过程作为所述正常运行机理;
24.获取所述变化过程中与所述移动夹具和/或所述固定夹具的勾爪执行动作相关的信号特征;
25.基于所述正常运行机理构建用于调整所述信号特征在所述变化过程中的位置的失步信号生成规则,以获取所述失步机理。
26.根据本发明的一个方面,步骤s2中,所述正常信号模拟模型包括:所述勾爪未动作时的第一电流信号模型,所述勾爪动作时的第二电流信号模型和所述勾爪完成动作时的第三电流信号模型;
27.步骤s2中,构建用于输出所述控制棒的驱动电流信号的信号模拟系统的步骤中,包括:
28.构建所述驱动电路的等效电路模型,并基于所述等效电路模型获取用于所述勾爪未动作时和所述勾爪完成动作时的驱动电流信号的第一仿真公式,其表示为:
[0029][0030]
基于高斯函数构建用于所述勾爪动作时的驱动电流信号的第二仿真公式,其表示为:
[0031][0032]
其中,a表示幅值,μ表示偏移量,σ表示陡峭程度;
[0033]
基于所述第一仿真公式在labview仿真平台构建所述第一电流信号模型和所述第三电流信号模型,以及基于所述第二仿真公式在labview仿真平台构建所述第二电流信号模型,并将所述第一信号模型、所述第三电流信号模型和所述第二电流信号模型建立连接构成所述正常信号模拟模型;
[0034]
基于所述失步机理在labview仿真平台构建失步信号随机模拟模型,并将所述失步信号随机模拟模型的输出端与所述正常信号模拟模型的输入端相连接;
[0035]
基于所述labview仿真平台构建噪声模拟模型,并将所述正常信号模拟模型的输出端与所述噪声模拟模型的输入端相连接。
[0036]
根据本发明的一个方面,步骤s3中,所述仿真测量系统包括:用于信号放大的测量放大器模块,用于对信号进行滤波的滤波器模块,用于对信号进行模数转换的模/数转换器模块,用于对信号进行采样并预处理的数据预处理模块,用于进行行进步数统计、失步步数统计和失步报警的信号还原模块。
[0037]
根据本发明的一个方面,步骤s3中,构建用于仿真测量所述压水堆控制棒驱动系统中控制棒行进步数的仿真测量系统的步骤中,采用labview仿真平台构建所述仿真测量系统。
[0038]
根据本发明的一个方面,所述数据预处理模块中包括:用于对信号进行平滑处理的解压缩模块,用于剔除信号中奇异项的卷积模块,用于对信号进行标度变换的标度变换模块,以及数据输出模块。
[0039]
根据本发明的一个方面,所述信号还原模块包括:行进步数计算模块和信息输出模块;
[0040]
所述行进步数计算模块包括:用于对输入的信号进行步数计算的计算控件;
[0041]
所述信息输出模块包括:实际移动步数统计单元,失步步数统计单元和失步警告单元;
[0042]
所述失步警告单元设置有用于调整报警分辨率的设定端口。
[0043]
根据本发明的一个方面,所述计算控件基于以下步骤对输入的信号进行步数计算,包括:
[0044]
获取输入的信号中所有的波峰和波谷;
[0045]
获取所有所述波峰的均值,以及获取所有所述波谷的均值;
[0046]
去除所有所述波峰中小于所述均值的波峰,以及去除所有所述波谷中大于所述均值的波谷;
[0047]
将相邻的所述波峰和所述波谷进行合并,生成波峰-波谷循环的合并信号;
[0048]
统计所述合并信号中的波峰数,以获得行进的步数。
[0049]
为实现上述发明目的,本发明提供一种基于前述的压水堆临界棒位测量方法构建的测量系统,包括:信号模拟系统和仿真测量系统;
[0050]
所述信号模拟系统用于仿真输出压水堆控制棒驱动系统中控制棒的驱动电流信号;其中,所述信号模拟系统包括:正常信号模拟模型、失步信号随机模拟模型和噪声模拟模型;
[0051]
所述仿真测量系统用于仿真测量所述压水堆控制棒驱动系统中控制棒的行进步数;其中,所述仿真测量系统包括:用于信号放大的测量放大器模块,用于对信号进行滤波的滤波器模块,用于对信号进行模数转换的模/数转换器模块,用于对信号进行采样并预处理的数据预处理模块,用于进行行进步数统计、失步步数统计和失步报警的信号还原模块。
[0052]
根据本发明的一种方案,本发明通过对线圈驱动电流信号的测量即可实现对控制棒动作和步数的准确判断,极大的降低了系统的复杂程度,可灵活的根据不同控制棒的驱动电流信号相应的定制控制棒失步情况的测量系统,极大的减轻了工作人员的工作量,缩短系统构建工期,节省了试验设备,减少对工作人员的辐射等优点。
[0053]
根据本发明的一种方案,本发明的方法可实现对控制棒驱动系统中机构的动作进行准确判断,进而可实现对控制棒位置的分辨率定位在1步的程度,极大的提高了测量精度,在物理试验中可提供准确参考,以及在实际应用中,可有效协助管理人员管理,降低压水堆的运行风险。
附图说明
[0054]
图1是示意性表示根据本发明的一种实施方式的压水堆临界棒位测量方法的步骤框图;
[0055]
图2是示意性表示根据本发明的一种实施方式的驱动结构的结构图;
[0056]
图3是示意性表示根据本发明的一种实施方式的控制棒提升动作的步进方案流程图;
[0057]
图4是示意性表示根据本发明的一种实施方式的控制棒插入动作的步进方案流程图;
[0058]
图5是示意性表示根据本发明的一种实施方式的提升过程中驱动电流信号变化时序图;
[0059]
图6是示意性表示根据本发明的一种实施方式的插入过程中驱动电流信号变化时序图;
[0060]
图7是示意性表示根据本发明的一种实施方式的提升过程驱动电流信号的实际波形图;
[0061]
图8是示意性表示根据本发明的一种实施方式的插入过程驱动电流信号的实际波形图;
[0062]
图9是示意性表示根据本发明的一种实施方式的驱动电流信号回沟阶段的实际波形放大图;
[0063]
图10是示意性表示根据本发明的一种实施方式的提升过程的驱动电流信号连续波形图;
[0064]
图11是示意性表示根据本发明的一种实施方式的驱动电路的等效电路模型图;
[0065]
图12是示意性表示根据本发明的一种实施方式的动作未完成时驱动电流信号的仿真波形图;
[0066]
图13是示意性表示根据本发明的一种实施方式的动作时的驱动电流信号的仿真波形图;
[0067]
图14是示意性表示根据本发明的一种实施方式的驱动电流信号的完整仿真波形图;
[0068]
图15是示意性表示根据本发明的一种实施方式的信号模拟系统的结构图;
[0069]
图16是示意性表示根据本发明的一种实施方式的测量放大器模块的结构图;
[0070]
图17是示意性表示根据本发明的一种实施方式的滤波器模块的结构图;
[0071]
图18是示意性表示根据本发明的一种实施方式的模/数转换器模块的结构图;
[0072]
图19是示意性表示根据本发明的一种实施方式的数据预处理模块的结构图;
[0073]
图20是示意性表示根据本发明的一种实施方式的信号还原模块的结构图;
[0074]
图21是示意性表示根据本发明的一种实施方式的计算控件的计数流程图;
[0075]
图22是示意性表示本发明的一种实施方式的提升动作验证过程图;
[0076]
图23是示意性表示本发明的另一种实施方式的提升动作验证过程图;
[0077]
图24是示意性表示本发明的另一种实施方式的提升动作验证过程图;
[0078]
图25是示意性表示本发明的一种实施方式的插入动作验证过程图;
[0079]
图26是示意性表示本发明的另一种实施方式的插入动作验证过程图;
[0080]
图27是示意性表示本发明的另一种实施方式的插入动作验证过程图。
具体实施方式
[0081]
下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
[0082]
如图1所示,根据本发明的一种实施方式,本发明的一种压水堆临界棒位测量方法,包括:
[0083]
s1.获取压水堆控制棒驱动系统的系统方案,并基于系统方案确定出用于压水堆控制棒驱动系统中控制棒升降过程的正常运行机理和失步机理;
[0084]
s2.构建用于仿真输出控制棒的驱动电流信号的信号模拟系统;其中,信号模拟系统包括:基于正常运行机理构建的正常信号模拟模型,基于失步机理构建的失步信号随机模拟模型,以及噪声模拟模型;
[0085]
s3.构建用于仿真测量压水堆控制棒驱动系统中控制棒行进步数的仿真测量系统;
[0086]
s4.获取压水堆控制棒驱动系统在历史运行过程中的历史经验数据,并基于历史经验数据配置信号模拟系统中正常信号模拟模型和失步信号随机模拟模型的运行规则;
[0087]
s5.设定信号模拟系统的运行条件,信号模拟系统基于运行条件和运行规则生成控制棒的驱动电流信号,仿真测量系统基于驱动电流信号进行仿真运行并输出检测结果;
[0088]
s6.重复执行步骤s5,并对获取的多组检测结果进行验证,若多组检测结果均符合要求,则将仿真测量系统接入实际的压水堆控制棒驱动系统进行线上测量。
[0089]
根据本发明的一种实施方式,步骤s1中,系统方案包括:压水堆控制棒驱动系统的结构方案和压水堆控制棒驱动系统的升降步进方案。在本实施方式中,结构方案涵盖了压水堆控制棒驱动系统整体的结构组成,具体的,结构方案包括:用于控制棒的驱动结构和用于控制驱动结构运行的驱动电路。由于在实际应用中压水堆控制棒驱动系统的整体结构复杂,且较多的结构与控制棒的升降驱动过程的关联性较低,进而在本方案中选取其中与控制棒升降直接相关的相关部分进行说明。进而,如图2所示,驱动结构包括:沿控制棒轴向布置的移动夹具1和固定夹具2,与移动夹具1相对应的移动夹具线圈mg,与固定夹具2相对应的固定夹具线圈sg,以及提升线圈lc。沿控制棒轴向且由上至下的方向,提升线圈lc、移动夹具线圈mg和固定夹具线圈sg依次设置。在本实施方式中,驱动电路分别与提升线圈lc、移动夹具线圈mg和固定夹具线圈sg相连接,用于向提升线圈lc、移动夹具线圈mg和固定夹具线圈sg分别输出驱动电流信号。
[0090]
在本实施方式中,移动夹具1的勾爪1a,固定夹具2的勾爪2a均是可开合的与控制棒上等间隔设置的凹口相连接的,用于实现控制棒的固定和移动。
[0091]
在本实施方式中,升降步进方案包括:提升动作方案和插入动作方案;其中,提升动作方案包括用于提升控制棒时提升线圈、移动夹具线圈和固定夹具线圈的运行顺序;插入动作方案包括用于插入控制棒时提升线圈、移动夹具线圈和固定夹具线圈的运行顺序。
[0092]
为进一步说明本发明的控制棒的运行过程,结合附图对其运行过程进行举例说明。
[0093]
结合图2和图3所示,在移动夹具线圈mg和固定夹具线圈sg已经锁定的情况下对控制棒的提升动作分为8步:
[0094]
(1)移动夹具线圈mg锁定结构脱离;
[0095]
(2)移动夹具线圈mg通电,闭合移动夹具的勾爪;
[0096]
(3)固定夹具线圈sg断开,释放固定夹具的勾爪;
[0097]
(4)提升线圈lc通电,提高升力;
[0098]
(5)固定夹具线圈sg通电,锁定控制棒;
[0099]
(6)断开移动夹具的勾爪;
[0100]
(7)提升线圈lc断电,移动夹具线圈mg、提升线圈lc结构自动下降;
[0101]
(8)移动夹具线圈mg通电,闭合移动夹具的勾爪。
[0102]
在上述的提升动作过程中,在正常运行的压水堆中,只会重复第(3)到第(7)步,而第(1)和第(2)步是在反应堆设备启动过程中才会出现的步骤,而在反应堆设备关闭动作之后才会出现第(8)步。
[0103]
结合图2和图4所示,在移动夹具线圈mg和固定夹具线圈sg已经锁定的情况下对控制棒的插入动作(即下降动作)分为8步:
[0104]
(1)移动夹具线圈mg,移动夹具的勾爪脱离;
[0105]
(2)提升线圈lc,提高升力,提升提升线圈lc,移动夹具线圈mg;
[0106]
(3)移动夹具线圈mg通电,闭合移动夹具的勾爪;
[0107]
(4)固定夹具线圈sg断电,释放固定夹具的勾爪;
[0108]
(5)提升线圈lc断电,提升线圈lc,移动夹具线圈mg与控制棒自动下降一步(依靠重力);
[0109]
(6)固定夹具线圈sg通电,闭合固定夹具的勾爪;
[0110]
(7)移动夹具线圈mg断电,释放移动夹具的勾爪;
[0111]
(8)移动夹具线圈mg线圈通电,闭合移动夹具的勾爪。
[0112]
在上述的插入动作过程中,在正常运行的压水堆中,只会重复第(3)到第(7)步,而第(1)和第(2)步是在反应堆设备启动过程中才会出现的步骤,而在反应堆设备关闭动作之后才会出现第(8)步。
[0113]
根据本发明的一种实施方式,在步骤s1中,基于系统方案确定出用于压水堆控制棒驱动系统中控制棒升降过程的正常运行机理和失步机理的步骤中,包括:
[0114]
基于结构方案和升降步进方案获取提升线圈、移动夹具线圈和固定夹具线圈在控制棒升降控制中驱动电流信号的信号时序;在本实施方式中,基于前述的对控制棒提升和插入过程的分析和确定,可以明确在前述的三个线圈在运行过程中,其通入的电流信号会随着控制棒的移动状态产生相应的变化,在此,通过检测是三个线圈中电流信号的变化产生相应大小的磁场,即可用来监测控制控制棒的动作。其中,在动作和稳定的状态中电流状态可以分为零电流、低电平电流和高电平电流,与之相对应动作可分为保持、传递和提升三种状态。根据线圈中电流的变化情况,就可以在控制棒动作过程中判断出线圈对应的动作情况。
[0115]
在本实施方式中,以核电站的实际运行过程中控制棒动作最小速度每7500ms(8步/m)动作一步,最大速度每833ms(72步/m)动作一步的设定条件即可获得控制棒在提升过程中相应的电流信号变化时序,参见图5所示。同样的,控制棒在插入过程中相应的电流信号变化时序也可相应的获得,参见图6所示。
[0116]
进一步的,结合图7、图8和图9所示,基于前述获得的信号时序确定出移动夹具线圈和固定夹具线圈在正常运行状态下驱动电流信号的变化过程作为正常运行机理;在本实施方式中,由于控制棒的动作过程是由线圈的充放电顺序来完成的,所以线圈的充放电产生磁力的过程即为控制棒的升降过程。由于线圈的充电过程不是瞬时的电流升降,而是缓慢的升降,因此,与移动夹具线圈mg对应的移动夹具的勾爪和与固定夹具线圈sg对应的固定夹具的勾爪在控制棒的的上升过程主要有以下三个阶段:
[0117]
(1)初始接电阶段:在这个阶段,线圈电流开始增加,因为线圈是感性负载,所以电流增加缓慢。随着电流的缓慢增加,电磁力逐渐增大。当线圈电流未达到一定程度时,磁力很小,不起作用。
[0118]
(2)回沟阶段:当电磁力随电流增大到一定程度时,钩爪动作,电流仍增大,磁铁上部磁隙减小,提升力增大。然而,当线圈位置发生变化时,相应的磁通量变小,线圈的电感变大,导致电流减小,在电流动态变化过程中就会产生一个回沟。
[0119]
(3)动作结束阶段:动作完成后,勾爪的位置和线圈电感不变,线圈形成回路暂时的稳定状态,在这种状态下,电流继续上升,给感性负载充电,使电流缓慢上升,直到电流稳定并达到峰值。
[0120]
进一步的,基于上述线圈的充放电过程可获取变化过程中与移动夹具和/或固定夹具的勾爪执行动作相关的信号特征。在本实施方式中,由于线圈的电流信号变化包含了控制棒的动作信息,进而可根据电流的变化来判断控制棒的动作。基于前述的充放电过程可知,由于线圈电流在上升过程中会有一个回沟,这个回沟的出现就代表着钩爪动作完成。
当钩爪的动作未完成时,电流信号是不会产生回沟的,因此可以根据是否有回沟信息判断线圈的动作。
[0121]
进一步的,基于正常运行机理构建用于调整信号特征在变化过程中的位置的失步信号生成规则,以获取失步机理。参见图10所示,以提升过程进行举例说明,其中,在图10中左侧为上一个信号序列完成正常提升时线圈中电流信号的波形(即正常运行机理),右侧为提升过程中出现失步的故障波形(即失步机理)。通过比较可知,在故障波形中,线圈电流并没有出现从零开始上升过程中应该出现的小槽(即回沟阶段)。此槽表示与线圈所对应的勾爪为钩入控制杆。而是在延迟一段时间(约180ms)后,出现,意味着此时勾爪移动并钩入控制杆。由于电流波形畸变较大,触发控制系统报警,起棒定时中断,导致控制系统故障。可见,该小槽(即回沟阶段)的延迟出现导致控制杆出现失步,并与同组其他对照组相比,控制棒行进减少了一步。因此,可通过上述过程获知,在正常运行机理中,若与夹具勾爪动作相对应的回沟阶段出现延迟即可导致正常的驱动电流信号转化为失步信号(即失步信号生成规则),进而以此规则对正常的驱动电流信号进行调整,即可将正常运行机理转化为失步机理。
[0122]
根据本发明的一种实施方式,步骤s2中,正常信号模拟模型包括:勾爪未动作时的第一电流信号模型,勾爪动作时的第二电流信号模型和勾爪完成动作时的第三电流信号模型;
[0123]
步骤s2中,构建用于输出控制棒的驱动电流信号的信号模拟系统的步骤中,包括:
[0124]
构建驱动电路的等效电路模型;在本实施方式中,参见图11所示,以移动夹具线圈为例,由于用于线圈的驱动电流信号的上升过程是一个缓慢上升的过程,而且在上升过程中存在明显的回沟信号,进而构建相应的等效电路模型(如图11所示)。在本实施方式中,该等效电路模型包括:线圈的等效电阻r,等效电感l,逆变管vt1,斩波管vt2,用于释放工作线圈的自感电动势的消能电阻r0;
[0125]
进一步的,基于等效电路模型构造出电路方程:
[0126][0127]
其中,i为线圈通过电流;
[0128]
由上式可知,由于电感值随着线圈的移动会发生变化,所以电感值是一个与位移值x相关的函数变量。最后通过这几个值之间的方程得到线圈上的电压值e。在电流上升初期,线圈位置发生变化,即l值不发生变化,所以上述的电路方程可以化为:
[0129][0130]
基于上述简化公式可知,其为电感充电的零状态响应的公式。进而可推导出线圈中电流的计算公式为:
[0131][0132]
进一步的,对上述电流公式进行求导,即可得出电流的斜率,表示为:
[0133]
[0134]
由上电流斜率公式可知,在初始时刻电流的起始斜率为e/l。
[0135]
在本实施方式中,由于线圈的等效电路模型是感性负载充放电的形式,当不发生位移时,电感值不变,因此,可采用感性充电公式建立勾爪未动作时和勾爪完成动作时驱动电流信号的第一仿真公式。在本实施方式中,基于原始的实际数据,可获得初始时刻电流的起始斜率e/l约为8.5,从电流开始到动作结束,数据约为150组,进而可设计的rc值为60,进而,第一仿真公式表示为:
[0136][0137]
进而,依据第一仿真公式仿真控制棒动作没有完成时的电流信号。经过仿真得到动作未完成的信号波形,如图12所示。
[0138]
在本实施方式中,基于高斯函数的导数构建用于勾爪动作时的驱动电流信号的第二仿真公式,其表示为:
[0139][0140]
其中,a表示幅值,μ表示偏移量,σ表示陡峭程度;
[0141]
在本实施方式中,依据实测数据令a=850,μ=90,σ=20,进而基于第二仿真公式仿真,并得到模型中勾爪动作时的电流波形,动作时的抖动信号波形如图13所示。
[0142]
基于上述仿真获得的动作未完成的信号的波形和动作时的电流波形进行叠加,即可得到完整的驱动电流信号波形,参见图14所示。
[0143]
在本实施方式中,如图15所示,基于第一仿真公式在labview仿真平台构建第一电流信号模型和第三电流信号模型,以及基于第二仿真公式在labview仿真平台构建第二电流信号模型,并将第一信号模型、第三电流信号模型和第二电流信号模型建立连接构成正常信号模拟模型;
[0144]
进一步的,如图15所示,基于失步机理在labview仿真平台构建失步信号随机模拟模型,并将失步信号随机模拟模型的输出端与正常信号模拟模型的输入端相连接;在本实施方式中,在失步信号随机模拟模型中设置有用于控制随机失步事件的失步控制端,并在可该失步控制端配置一个随机的整数(0-50之间),以控制正常信号模拟模型在输出该整数个步数的驱动电信号后添加一个失步信号。
[0145]
进一步的,如图15所示,基于labview仿真平台构建噪声模拟模型,并将正常信号模拟模型的输出端与噪声模拟模型的输入端相连接。在本实施方式中,构建噪声模拟模型以用于在生成的控制棒驱动电流信号中加入噪声。在本实施方式中,白噪声的是幅值设置为1。
[0146]
最后,如图15所示,将失步信号随机模拟模型、正常信号模拟模型和噪声模拟模型依次串联起来即可获得用于输出驱动电流信号的信号模拟系统,同时,在失步信号随机模拟模型的输入端设置行进步数控制端,用于设定整个信号模拟系统输出信号的总步数。
[0147]
根据本发明的一种实施方式,构建用于仿真测量压水堆控制棒驱动系统中控制棒行进步数的仿真测量系统的步骤中,采用labview仿真平台构建仿真测量系统。在本实施方式中,采用控制棒动作、反应性、功率温度反馈机理等联锁或联动机制构建仿真测量系统。
在本实施方式中,仿真测量系统包括:用于信号放大的测量放大器模块,用于对信号进行滤波的滤波器模块,用于对信号进行模数转换的模/数转换器模块,用于对信号进行采样并预处理的数据预处理模块,用于进行行进步数统计、失步步数统计和失步报警的信号还原模块。
[0148]
如图16所示,根据本发明的一种实施方式,测量放大器模块通过调用在labview仿真平台中自带的放大器模块实现,且设置放大倍数为100倍,偏移量设置为0。
[0149]
如图17所示,根据本发明的一种实施方式,滤波器模块通过调用在labview仿真平台中自带的滤波器实现,且设置其低截止频率为50。
[0150]
如图18所示,根据本发明的一种实施方式,模/数转换器模块通过调用在labview仿真平台中自带的模数转换模块实现,并分辨率设置为16位。
[0151]
如图19所示,根据本发明的一种实施方式,数据预处理模块中包括:用于对信号进行平滑处理的解压缩模块,用于剔除信号中奇异项的卷积模块,用于对信号进行标度变换的标度变换模块,以及数据输出模块。
[0152]
如图20所示,根据本发明的一种实施方式,信号还原模块包括:行进步数计算模块和信息输出模块。在本实施方式中,行进步数计算模块包括:用于对输入的信号进行步数计算的计算控件;其中,计算控件采用c语言进行编写所获得。
[0153]
如图21所示,根据本发明的一种实施方式,计算控件基于以下步骤对输入的信号进行步数计算,包括:
[0154]
获取输入的信号中所有的波峰和波谷;在本实施方式中,接收输入的信号,并选取相邻的三个信号数据(即第n个信号、第n 1个信号、第n 2个信号);判断处于中间位置的信号(即第n 1个信号)是否为波峰;若是,则将其添加至波峰和波谷数组,若否,则判断其是否为波谷,若是,则将其添加至波峰和波谷数组,否则顺序抽取下一个信号数据执行上述步骤;
[0155]
获取所有波峰的均值,以及获取所有波谷的均值;
[0156]
去除所有波峰中小于均值的波峰,以及去除所有波谷中大于均值的波谷;在本实施方式中,从前述步骤中获取的波峰和波谷数组中抽取出波峰与均值进行比较,若大于均值则保留,若小于均值则将其从数组中删除,同样的从波峰和波谷数组中抽取出波谷与均值进行比较,若小于均值则保留,若大于均值则将其从数组中删除;
[0157]
将相邻的波峰和波谷进行合并,生成波峰-波谷循环的合并信号;在本实施方式中,获取的合并信号满足一个波峰一个波谷的规律。
[0158]
统计合并信号中的波峰数,以获得行进的步数。
[0159]
如图20所示,根据本发明的一种实施方式,信息输出模块包括:实际移动步数统计单元,失步步数统计单元和失步警告单元。在本实施方式中,实际移动步数统计单元以基于行进步数计算模块输出的步数进行计数。在本实施方式中,失步步数统计单元用于接收信号模拟系统中行进步数控制单中设定的总步数,以及接收行进步数计算模块输出的步数,并将其进行作差后获得失步步数。在本实施方式中,失步警告单元用于接收失步步数统计单元输出的失步步数,并进行报警。在本实施方式中,失步警告单元设置有用于调整报警分辨率的设定端口。其中,当失步步数达到分辨率要求时,失步警告单元进行报警,若失步步数未达到分辨率要求,则失步警告单元不发出报警。例如,当失步警告单元中的报警分辨率
设置为8步时,则只有当失步步数达到8步才判定为失步事件并告警。
[0160]
根据本发明的一种实施方式,在步骤s4中,获取压水堆控制棒驱动系统在历史运行过程中的历史经验数据,并基于历史经验数据配置信号模拟系统中正常信号模拟模型和失步信号随机模拟模型的运行规则的步骤中,基于实际的压水堆前期运行经验,构建压水堆控制棒行进正常、失步数据库,开展压水堆控制棒行进失步信号系统还原仿真工作。具体的,通过获取的控制棒行进正常、失步数据库对信号模拟系统的失步信号随机模拟模型中失步控制端的随机整数进行设定,以获得信号模拟系统输出正常驱动电流信号和失步信号的运行规则。
[0161]
根据本发明的一种实施方式,步骤s5中,设定信号模拟系统的运行条件的步骤中,该运行条件包括:对信号模拟系统的行进步数控制端设定驱动电流信号的行进总步数,以及控制棒运行方向。
[0162]
根据本发明的一种实施方式,步骤s6中,通过改变信号模拟系统的运行条件,以及改变仿真测量系统中失步警告单元中的报警分辨率的方式进行多次重复验证。例如,将失步警告单元中的报警分辨率设置为8步和1步,同时,为保证验证过程中的对比性,将提升和下插的步数都设置为20步(即行进总步数)。
[0163]
以控制棒的提升过程进行多次仿真运行进行验证:
[0164]
如图22所示,将信号模拟系统设置的行进总步数设置为20,并且将报警分辨率设置为8步以执行提升过程的仿真运行,在本实施方式中,按照设定的总步数行执行后,仿真测量系统获得上述过程的移动步数为27,则失步步数为7步,并未达到报警分辨率,失步告警未触发,符合要求。
[0165]
如图23所示,将信号模拟系统设置的行进总步数设置为20,并且将报警分辨率设置为8步以再次执行提升过程的仿真运行,在本实施方式中,按照设定的总步数执行后,仿真测量系统获得上述过程的移动步数为28,则失步步数为8步,达到报警分辨率,失步告警触发,符合要求。
[0166]
如图24所示,将信号模拟系统设置的行进总步数设置为20,并且将报警分辨率设置为1步以再次执行提升过程的仿真运行,在本实施方式中,按照设定的总步数执行后,仿真测量系统获得上述过程的移动步数为27,则失步步数为7步,达到报警分辨率,失步告警触发,符合要求。
[0167]
以控制棒的插入过程进行多次仿真运行进行验证:
[0168]
如图25所示,将信号模拟系统设置的行进总步数设置为-20(即插入运行总步数20),并且将报警分辨率设置为8步以执行提升过程的仿真运行,在本实施方式中,按照设定的总步数执行后,仿真测量系统获得上述过程的实际移动步数为-13,则失步步数为7步,并未达到报警分辨率,失步告警未触发,符合要求。
[0169]
如图26所示,将信号模拟系统设置的行进总步数设置为-20(即插入运行总步数20),并且将报警分辨率设置为8步以执行提升过程的仿真运行,在本实施方式中,按照设定的总步数执行后,仿真测量系统获得上述过程的实际移动步数为-12,则失步步数为8步,达到报警分辨率,失步告警触发,符合要求。
[0170]
如图27所示,将信号模拟系统设置的行进总步数设置为-20(即插入运行总步数20),并且将报警分辨率设置为1步以执行提升过程的仿真运行,在本实施方式中,按照设定
的总步数执行后,仿真测量系统获得上述过程的实际移动步数为-14,则失步步数为6步,达到报警分辨率,失步告警触发,符合要求。
[0171]
由上可知,本发明的测量方法通过仿真的测量系统以线圈的驱动电流信号为检测对象可有效提高对控制棒行进步数的检测精度,相比传统测量系统8步的检测精度,本方案的测量分辨率可提高至1步,极大的提高了检测准确性和检测效率。
[0172]
根据本发明的一种实施方式,本发明提供一种基于前述的压水堆临界棒位测量方法构建的测量系统,包括:信号模拟系统和仿真测量系统。在本实施方式中,信号模拟系统用于仿真输出压水堆控制棒驱动系统中控制棒的驱动电流信号;其中,信号模拟系统包括:正常信号模拟模型、失步信号随机模拟模型和噪声模拟模型。在本实施方式中,仿真测量系统用于仿真测量压水堆控制棒驱动系统中控制棒的行进步数;其中,仿真测量系统包括:用于信号放大的测量放大器模块,用于对信号进行滤波的滤波器模块,用于对信号进行模数转换的模/数转换器模块,用于对信号进行采样并预处理的数据预处理模块,用于进行行进步数统计、失步步数统计和失步报警的信号还原模块。
[0173]
通过上述设置,本发明的测量系统可基于实际压水堆的运行数据对信号模拟系统进行设置,使得信号模拟系统更加准确的模拟出相应的驱动电流信号,并以此实现对仿真测量系统进行调试和验证,极大的提高了本发明的调试效率,可维护性和适用性。同时,通过验证的仿真测量系统其检测分辨率高,且检测速度快,可直接用于实际压水堆中控制棒行进步数的检测,极大的提高了对控制棒行进步数的检测精度。
[0174]
上述内容仅为本发明的具体方案的例子,对于其中未详尽描述的设备和结构,应当理解为采取本领域已有的通用设备及通用方法来予以实施。
[0175]
以上所述仅为本发明的一个方案而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。