技术特征:
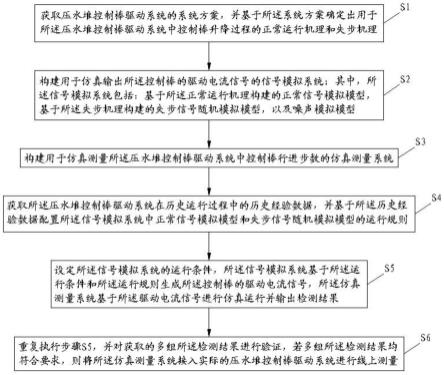
1.一种压水堆临界棒位测量方法,包括:s1.获取压水堆控制棒驱动系统的系统方案,并基于所述系统方案确定出用于所述压水堆控制棒驱动系统中控制棒升降过程的正常运行机理和失步机理;s2.构建用于仿真输出所述控制棒的驱动电流信号的信号模拟系统;其中,所述信号模拟系统包括:基于所述正常运行机理构建的正常信号模拟模型,基于所述失步机理构建的失步信号随机模拟模型,以及噪声模拟模型;s3.构建用于仿真测量所述压水堆控制棒驱动系统中控制棒行进步数的仿真测量系统;s4.获取所述压水堆控制棒驱动系统在历史运行过程中的历史经验数据,并基于所述历史经验数据配置所述信号模拟系统中正常信号模拟模型和失步信号随机模拟模型的运行规则;s5.设定所述信号模拟系统的运行条件,所述信号模拟系统基于所述运行条件和所述运行规则生成所述控制棒的驱动电流信号,所述仿真测量系统基于所述驱动电流信号进行仿真运行并输出检测结果;s6.重复执行步骤s5,并对获取的多组所述检测结果进行验证,若多组所述检测结果均符合要求,则将所述仿真测量系统接入实际的压水堆控制棒驱动系统进行线上测量。2.根据权利要求1所述的压水堆临界棒位测量方法,其特征在于,步骤s1中,所述系统方案包括:所述压水堆控制棒驱动系统的结构方案和所述压水堆控制棒驱动系统的升降步进方案;其中,所述结构方案包括:用于所述控制棒的驱动结构和用于控制所述驱动结构运行的驱动电路;所述驱动结构包括:沿控制棒轴向布置的移动夹具和固定夹具,与所述移动夹具相对应的移动夹具线圈,与所述固定夹具相对应的固定夹具线圈,以及提升线圈;沿所述控制棒轴向且由上至下的方向,所述提升线圈、所述移动夹具线圈和所述固定夹具线圈依次设置;所述驱动电路分别与所述提升线圈、所述移动夹具线圈和所述固定夹具线圈相连接,用于向所述提升线圈、所述移动夹具线圈和所述固定夹具线圈分别输出驱动电流信号;所述升降步进方案包括:提升动作方案和插入动作方案;其中,所述提升动作方案包括用于提升所述控制棒时所述提升线圈、所述移动夹具线圈和所述固定夹具线圈的运行顺序;所述插入动作方案包括用于插入所述控制棒时所述提升线圈、所述移动夹具线圈和所述固定夹具线圈的运行顺序。3.根据权利要求2所述的压水堆临界棒位测量方法,其特征在于,在步骤s1中,基于所述系统方案确定出用于所述压水堆控制棒驱动系统中控制棒升降过程的正常运行机理和失步机理的步骤中,包括:基于所述结构方案和所述升降步进方案获取所述提升线圈、所述移动夹具线圈和所述固定夹具线圈在所述控制棒升降控制中驱动电流信号的信号时序;基于所述信号时序确定出所述移动夹具线圈和所述固定夹具线圈在正常运行状态下驱动电流信号的变化过程作为所述正常运行机理;获取所述变化过程中与所述移动夹具和/或所述固定夹具的勾爪执行动作相关的信号特征;
基于所述正常运行机理构建用于调整所述信号特征在所述变化过程中的位置的失步信号生成规则,以获取所述失步机理。4.根据权利要求3所述的压水堆临界棒位测量方法,其特征在于,步骤s2中,所述正常信号模拟模型包括:所述勾爪未动作时的第一电流信号模型,所述勾爪动作时的第二电流信号模型和所述勾爪完成动作时的第三电流信号模型;步骤s2中,构建用于输出所述控制棒的驱动电流信号的信号模拟系统的步骤中,包括:构建所述驱动电路的等效电路模型,并基于所述等效电路模型获取用于所述勾爪未动作时和所述勾爪完成动作时的驱动电流信号的第一仿真公式,其表示为:基于高斯函数构建用于所述勾爪动作时的驱动电流信号的第二仿真公式,其表示为:其中,a表示幅值,μ表示偏移量,σ表示陡峭程度;基于所述第一仿真公式在labview仿真平台构建所述第一电流信号模型和所述第三电流信号模型,以及基于所述第二仿真公式在labview仿真平台构建所述第二电流信号模型,并将所述第一信号模型、所述第三电流信号模型和所述第二电流信号模型建立连接构成所述正常信号模拟模型;基于所述失步机理在labview仿真平台构建失步信号随机模拟模型,并将所述失步信号随机模拟模型的输出端与所述正常信号模拟模型的输入端相连接;基于所述labview仿真平台构建噪声模拟模型,并将所述正常信号模拟模型的输出端与所述噪声模拟模型的输入端相连接。5.根据权利要求3或4所述的压水堆临界棒位测量方法,其特征在于,步骤s3中,所述仿真测量系统包括:用于信号放大的测量放大器模块,用于对信号进行滤波的滤波器模块,用于对信号进行模数转换的模/数转换器模块,用于对信号进行采样并预处理的数据预处理模块,用于进行行进步数统计、失步步数统计和失步报警的信号还原模块。6.根据权利要求5所述的压水堆临界棒位测量方法,其特征在于,步骤s3中,构建用于仿真测量所述压水堆控制棒驱动系统中控制棒行进步数的仿真测量系统的步骤中,采用labview仿真平台构建所述仿真测量系统。7.根据权利要求6所述的压水堆临界棒位测量方法,其特征在于,所述数据预处理模块中包括:用于对信号进行平滑处理的解压缩模块,用于剔除信号中奇异项的卷积模块,用于对信号进行标度变换的标度变换模块,以及数据输出模块。8.根据权利要求6所述的压水堆临界棒位测量方法,其特征在于,所述信号还原模块包括:行进步数计算模块和信息输出模块;所述行进步数计算模块包括:用于对输入的信号进行步数计算的计算控件;所述信息输出模块包括:实际移动步数统计单元,失步步数统计单元和失步警告单元;所述失步警告单元设置有用于调整报警分辨率的设定端口。9.根据权利要求6所述的压水堆临界棒位测量方法,其特征在于,所述计算控件基于以
下步骤对输入的信号进行步数计算,包括:获取输入的信号中所有的波峰和波谷;获取所有所述波峰的均值,以及获取所有所述波谷的均值;去除所有所述波峰中小于所述均值的波峰,以及去除所有所述波谷中大于所述均值的波谷;将相邻的所述波峰和所述波谷进行合并,生成波峰-波谷循环的合并信号;统计所述合并信号中的波峰数,以获得行进的步数。10.一种基于权利要求1至9任一项所述的压水堆临界棒位测量方法构建的测量系统,其特征在于,包括:信号模拟系统和仿真测量系统;所述信号模拟系统用于仿真输出压水堆控制棒驱动系统中控制棒的驱动电流信号;其中,所述信号模拟系统包括:正常信号模拟模型、失步信号随机模拟模型和噪声模拟模型;所述仿真测量系统用于仿真测量所述压水堆控制棒驱动系统中控制棒的行进步数;其中,所述仿真测量系统包括:用于信号放大的测量放大器模块,用于对信号进行滤波的滤波器模块,用于对信号进行模数转换的模/数转换器模块,用于对信号进行采样并预处理的数据预处理模块,用于进行行进步数统计、失步步数统计和失步报警的信号还原模块。
技术总结
本发明涉及一种压水堆临界棒位测量方法及测量系统,测量方法包括:获取压水堆控制棒驱动系统的系统方案,并确定出用于压水堆控制棒驱动系统中控制棒升降过程的正常运行机理和失步机理;构建用于仿真输出控制棒的驱动电流信号的信号模拟系统;构建用于仿真测量压水堆控制棒驱动系统中控制棒行进步数的仿真测量系统;获取压水堆控制棒驱动系统的历史经验数据并配置信号模拟系统的运行规则;设定信号模拟系统的运行条件,基于运行条件和运行规则生成控制棒的驱动电流信号,仿真测量系统基于驱动电流信号进行仿真运行并输出检测结果;重复上一步骤,并对检测结果进行验证,若符合要求,则将仿真测量系统接入实际的压水堆控制棒驱动系统进行线上测量。驱动系统进行线上测量。驱动系统进行线上测量。
技术研发人员:陈忠 蒋杰 赵子甲 吕中良 袁宝新 潘冬梅
受保护的技术使用者:西南科技大学
技术研发日:2022.06.06
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。