1.本发明涉及集装箱装载设施和具有独立权利要求的前序部分的特征的用于运行监控的方法。
背景技术:
2.在集装箱码头中,集装箱桥(英文:sts(船到岸)起重机)将标准化的iso集装箱从船装载到岸上,或者直接装载到载重汽车上,或者集装箱桥将集装箱转移给运输交通工具、特别是无人员驾驶运输工具(agv;自动导引车(automated guided vehicle)),集装箱桥通常构造为龙门架工装载机并且自动地接收集装箱并且行驶至目的地。agv在其上行驶的面出于安全原因禁止人员进入。
3.目的地例如能够是陆上的临时仓库,在临时仓库中,轨道连接的龙门架起重机(rmg;轨道式龙门架(rail mounted gantry))或橡胶轮胎式龙门架起重机(rtg;橡胶轮胎式龙门架(rubber tyred gantry))卸载集装箱以临时存储。
4.在龙门架内部或外部存在过渡轨道,经由过渡轨道交付或提取集装箱。交接通过起重机驾驶员手动进行起重机控制来进行。
5.用于集装箱的道路运输的交通工具是带或不带挂车的载重汽车,以及由载重汽车牵引机和如常规鞍式挂车那样悬挂的集装箱底盘构成的鞍式载重汽车,或者具有码头挂车的码头载重汽车。在用于道路运输的装载任务的情况下,驾驶员或其他人员必须在装载或卸载之前或之后在交通工具周围走动,并解锁或锁定交通工具处的扭锁。在使用码头挂车的装载任务的情况下,驾驶员必须检查:是否移除所谓的ibcs(集装箱间连接器(inter box connectoren),其将集装箱束紧在船上)。人员可能在起重机下方的空间自由移动。
6.ep 2 724 972 b1公开了具有独立权利要求的前序部分的特征的集装箱装载设施和方法,特别是一种用于以计算机辅助的方式根据测量点的代表承载交通工具的上侧的云来确定位置的方法,在该位置中,借助于起重机将iso集装箱安放到承载交通工具上,通过利用3d激光扫描仪或者两个置于一定间距的3d激光扫描仪从至少5米的高度从上方扫描承载交通工具来获得测量点。所提出的3d激光扫描仪由3d激光扫描仪形成,2d激光扫描仪能够借助于伺服马达来枢转并且在此是具有大约10mm间距分辨率的飞行时间红外激光扫描仪。需要该分辨率以鉴别和定位承载交通工具处的扭锁并且从中能够计算出集装箱目标位置数据。
7.这种3d激光扫描以相对密集的三维点云的形式提供测量场景的基本完整的图像。
8.该方法和其他方法此时实现:原则上也在载重汽车发车时尽可能地将起重机活动自动化,但是在此必须绝对保证工作安全性,工作安全性至今为止例如通过以下方式实现,起重机驾驶员无线电联系工作区域中的人员、例如载重汽车驾驶员并且能够发出和接收指示。
9.为了监控危险区域,人员能够使用具有图像评估装置的基于相机的系统,人员在道路运输交通工具自动装载或卸载时停留在危险区域中,以便在必要情况下触发警报或紧
急停止。然而,由于这种系统的不充足性或者例如由于视线限制和/或不利的天气条件会造成误报或漏报的危险识别进而造成人员伤害和相应的停工时间。因此期望的是,能够以至少一种另外的方式识别和定位工作区域中的人员进而保证特殊的冗余。
10.在用于集装箱和载重汽车的位置确定的3d激光扫描仪的测量点云中,原则上也能够识别出某处是否存在某种不属于该处的东西,但是,为获得这种相对高分辨的扫描所需的时间长了多个数量级,以便还能够识别出在工作区域中的人员的存在,尤其当人员移动时。特别地,至今为止使用的3d激光扫描仪必须作为整体从一个位置转动到下一个位置中,在那里3d扫描仪相应地短停下以便获得剖面轮廓。在所有情况下都能够考虑使用非常多的单独的3d激光扫描仪,其分别仅观察场景的一小部分,但是这样大致成倍增加设备和计算耗费。
技术实现要素:
11.本发明所基于的目的是,以能接受的耗费改进集装箱装载时的工作安全性。
12.所述目的通过具有独立权利要求中说明的特征的集装箱装载设施和方法来实现。本发明的有利的改进形式在从属权利要求中说明。
13.根据本发明,激光扫描仪是以下类型的激光扫描仪,该类型的激光扫描仪设置用于同时在多个彼此间隔开的平面或线中扫描工作面,其中,激光扫描仪发射光束的发散平面的扇区或发散的单光束的扇区。平面或线在工作面的高度彼此间具有间距,该间距在地面上的至少一个方向上、例如在装载位置的纵向方向上和/或横向于此的方向上大于10且小于30厘米。
14.此外,存在人员识别单元,人员识别单元设计用于在集装箱装载过程期间使得一个或多个激光扫描仪执行至少一次扫描,以便获得测量点云,在如此获得的测量点云中,例如通过求平均值和/或消除异常值鉴别工作面和道路运输交通工具的装载面;以得出在测量点云中是否存在在鉴别到的工作面或鉴别到的装载面之上超过0.5米或替代地超过1米的至少一个或在一个优选的实施方式中至少两个相邻的测量点,并且如果存在至少一个这种测量点,则输出人员可能性信号,人员可能性信号显示出在相应的位置处可能存在人员。
15.另外存在安全装置,安全装置设计用于:当输出人员可能性信号时,减慢或停止起重机移动,其中,首先或附加地能够输出警告信号。
16.在一个优选的实施方式中,每个激光扫描仪是3d多层扫描仪。这种扫描仪、也称为3d多平面扫描仪或3d多层扫描仪是可市购的,并且例如在ep 2 983 030 a2中描述,其公开了在许多应用中不期望仅在唯一的平面中检测环境,尤其在移动应用中、例如在无人驾驶交通工具中,其要求同样识别具有边缘和台阶的地面,像在不同高度中伸入行驶区域中的物体。代替使用其中传感器作为整体或转动镜附加周期地倾斜的三维扫描仪,如果不监控整个空间区域而是仅监控一些彼此层状的平面,则3d多层扫描仪是足够的。
17.本发明包括多层激光扫描仪的新的使用目的,该多层激光扫描仪不用于通过将扫描平面彼此分层来识别或多或少水平地处于扫描仪之前的物体,而是用于识别集装箱转运区中的或多或少竖直地处于扫描仪下方的人员,其中,扫描平面彼此并排分层。与在常规的3d激光扫描不同,仅获得测量场景的不完整的图像,这在适当地选择平面之间的间距的情况下足够识别出在测量场景中是否可能存在人员,并且在非常短的时间中获得测量场景的
该图像,该时间最多为1/10秒的数量级并且通常短得多,因此还能够识别移动的人员。
18.替代于多层激光扫描仪,对于本发明也能够使用所谓的3d阵列扫描仪或闪光激光雷达设备。这种设备具有激光二极管的阵列,激光二极管同时发射发散的单光束的扇区,其中,立即提供完整的3d图像。
19.在优选的实施方式中,在工作面的边缘或拐角附近,在工作面上标记例如测量为2
×
2米的人员停留区,并且安全装置仅当对于人员停留区、但是不对于其余的工作面输出人员可能性信号进而在人员停留区中、但不在其余工作面中探测存在人员时才允许起重机移动。
20.在优选的实施方式中,工作面分成多个区,即至少分成至少包括装载位置、即或者对应于装载位置或大于装载位置的内部区,和围绕内部区延伸并且与其邻接的外部区。在集装箱装载过程期间执行多个时间上依次连续的扫描,并且如果得出在鉴别到的工作面或鉴别到的装载面之上超过0.5米(或替代地超过1米)的至少一个测量点,则输出人员可能性信号。
21.附加地检查这种测量点的方位在测量点云中是否随时间变化。如果是,则能够输出移动人员可能性信号。
22.根据对于两个区中的哪个区输出两种信号类型中的哪一种来减慢或停止起重机移动。在此,在设施运行期间,其中划分了工作面的区的位置和大小能够动态地改变,并且匹配于刚刚装载的集装箱的方位和移动方向。
23.与常规的安全系统和避免碰撞系统不同,因此,不必立即进行紧急切断,而是能够逐级进行反应,例如当识别到人员接近外部区时首先只输出警告,然后,当人员进入外部区中时起重机较缓慢地工作,并且当人员进入内部区中时紧急切断。
24.根据本发明,在用于对集装箱起重机下方的地面上的工作面进行运行监控的方法中,其中,在集装箱装载、下放或提升过程期间,从地面之上的一个高度使得一个或多个3d扫描仪以三个维度从上方扫描工作面,其中,该高度超过iso集装箱的高度的数倍,一个或多个激光扫描仪利用光束的发散平面的扇区或发散的单光束的扇区同时在多个彼此间隔开的平面或线中扫描工作面,以便获得测量点云,其中,工作面的高度的线或平面彼此间具有一定间距,该间距的大小被确定为,使得立于工作面上的人员由光束的至少一个平面或单光束中的至少一个射中。在如此获得的测量点云中,首先鉴别工作面。然后得出在测量点云中是否存在至少一个或多个以下测量点,该一个或多个测量点对于站立在鉴别到的工作面上的人员是典型的。如果存在一个或在优选的实施方式中存在至少两个相邻的这种测量点,则减慢或停止起重机移动。
25.在优选的实施方式中,如果对于工作面的边缘处的预设的区域、但不对于工作面的中央区域得出对于站立在鉴别到的工作面上的人员典型的一个或多个测量点,则不减慢或停止起重机移动,而是保持允许起重机移动。
26.在优选的实施方式中,在工作面内限定多个区,即至少一个内部区和外部区,内部区直接处于悬挂在起重机处的集装箱下方,外部区围绕内部区延伸并且与其邻接。当在内部区或外部区中没有得出对于站立在鉴别到的工作面上的人员典型的一个或多个测量点时,才允许起重机移动。当在外部区中得出而没有在内部区得出对于站立在鉴别到的工作面上的人员典型的一个或多个测量点时,减慢起重机移动。当在内部区得出对于站立在鉴
别到的工作面上的人员典型的一个或多个测量点时,停止起重机移动。
附图说明
27.本发明的其他特征和优点从从属权利要求以及下面参照附图对实施例进行的描述中得出。
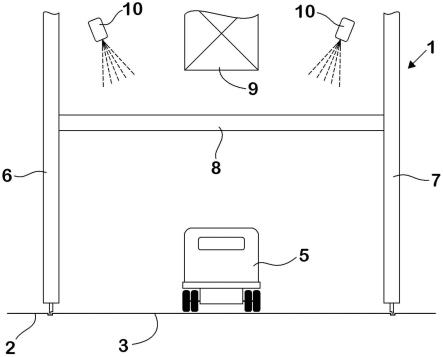
28.图1示出轨道连接的龙门架起重机的下部分的示意侧视图,在该述龙门架起重机中,工作面处于待监控的工作空间的地面处;
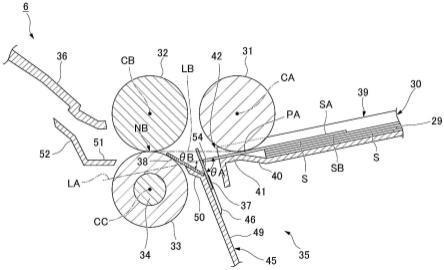
29.图2示出图1的工作面的示意俯视图;
30.图3示出具有动态变化的区的集装箱起重机下方的工作面的示意俯视图;和
31.图4示出用于对集装箱起重机下方的工作面进行运行监控的方法的流程图。
具体实施方式
32.为了在集装箱港口中对在船到岸起重机(sts起重机)的区域(龙门架)中的货物进行装载需要人员活动。这例如能够是载重汽车的导航员或者是以下人员,该人员将所谓的ibcs(集装箱连接器(inter box connectoren),其将彼此叠加的集装箱束紧在船上)在其被放置到地面上或载重汽车底盘上之前从集装箱移除。该人员能够在龙门架区域中自由移动。由于安全限制、疏忽大意和/或不利的天气条件,在放下或拿起负载时会造成人员伤害并且由此导致停机时间。
33.为了避免人员事故,提出用于在限定的工作空间中进行物体识别和物体跟踪的冗余系统。因此,能够确定危险区域中的每个人员的停留位置并且在危险情况下例如停止起重机的起重功能。该系统能够在装载集装箱期间识别、定位工作空间中的人员,并连续地将他们的位置反馈给起重机控制器。
34.图1示出集装箱起重机(在此为rmg龙门架起重机1)的下部分,该集装箱起重机能够在港口或其他集装箱转运地的地面2上的轨道上行驶,并且集装箱起重机形成装载设施或装载设施的一部分。在图2中从上方示出的工作面3在龙门架起重机1下方处于地面2处,其尺寸与图1相同。在工作面3上标记用于载重汽车5等的长形的装载位置4(图2)。载重汽车5具有装载面5a和驾驶室5b。
35.替代地,集装箱起重机也能够是rtg起重机或sts起重机。
36.人员能够且允许停留在其中的待监控的工作空间例如能够是是长方体的,其由地面2以及龙门架起重机1的各两个竖直支柱6、7和横向承载件8来界定。但是,例如,在竖直支柱6、7彼此远离的情况下,待监控的工作空间也能够较小并且在工作面3上延伸,工作面不完全到达支柱,这例如在图2所示,图2以相同的比例示出图1的情况的俯视图。
37.在该实施例中,工作面3在龙门架起重机1的竖直支柱6、7之间延伸。在其他类型的集装箱起重机、例如将集装箱经过侧面放置的所谓的悬臂rmg起重机中,或者在sts起重机中,工作面也能够完全或部分地位于起重机支柱之外,在sts起重机的情况下处于其所谓的后伸距区域中。
38.在地面2上方的高度中安装两个3d扫描仪10,3d扫描仪10设计用于通过其以三个维度从上方扫描工作面3包括立于其上的载重汽车5来监控工作空间,其中,该高度超过iso集装箱的高度的数倍,iso集装箱如其在图1中作为来自上方的集装箱9表明。
39.特别地,在左前方的竖直支柱6和右后方的竖直支柱附近在例如10或20米的高度中存在各一个3d激光扫描仪10,其中,右后方竖直支柱被图1中可见的右前方的竖直支柱7遮挡,即在两个对角竖直的支柱6、7,使得3d激光扫描仪10垂直地位于工作面3的两个对角的角落上,如图2中所示。在此,两个3d激光扫描仪10比标记的装载位置4的对角线彼此测量的更远。
40.激光扫描仪10分别是3d多层扫描仪,或者替代地是3d阵列扫描仪或闪光激光雷达设备。如在该实施例中,激光扫描仪10能够有利地固定在起重机处,然而,以下实施方式也是可行的,其中,激光扫描仪固定在支柱或电线杆上,支柱或电线杆也能够已经存在于运行场地上,只要其距工作面足够近并且不妨碍起重机活动。在任何情况下,激光扫描仪10都不是主要从正上方、而是或多或少倾斜地从上方扫描工作面3。
41.此外,激光扫描仪10设计和定向为,使得它们能够除了由于激光扫描仪10的平面或线之间存在的空隙之外完全监控整个工作面3,其中,两个激光扫描仪10中的每一个负责两个l形的分区11、12中的一个,分区相互补充成围绕装载位置4的对应于工作面3的矩形。由此,避免通过载重汽车5或立于其上的或竖直在其上方悬挂的集装箱9遮挡工作面3的一部分。在3d多层扫描仪的情况下,扫描平面优选平行于装载位置4的纵向方向伸展。
42.代替龙门架起重机1,上述装载设施还能够具有其他起重机、即例如集装箱桥,其能够将集装箱从船直接运输到载重汽车上,或者反之。在这种情况下,载重汽车车道和载重汽车装载位置能够横向于码头或沿其纵向方向伸展。
43.在图1和图2所示的集装箱装载设施的运行中,在集装箱装载过程期间,人员识别单元使得激光扫描仪10连续地执行扫描,例如每秒或每十分之一秒扫描一次。原则上,以下测量点云是足够的,在该测量点云中鉴别地面2或工作面3以及载重汽车2的装载面5a。
44.这能够在计算方面以不同的方式来进行,这些方式原则上是等价的。因此,在能够将位于装载位置4的预先已知的轮廓之外的所有测量点视作为形成工作面,并且通过从位于装载位置4的轮廓内的测量点中仅选择位于地面2之上的对此典型的高度中的、即例如地面2之上1米的那些测量点,来获得载重汽车5的装载面5a。这也消除了源自载重汽车5的驾驶室5b的测量点。替代地,能够将工作空间划分成具有匹配于激光扫描仪10的分辨率的尺寸的多个虚拟的长方体,并且在消除容易可识别地代表驾驶室5b的长方体之后,将测量点落入其中的所有长方体的上侧视作为工作面3的地面的和载重汽车5的装载面5a的轮廓。
45.然后得出在测量点云中是否存在位于高于鉴别的工作面或鉴别的装载面大于0.5米的至少一个测量点,或者与此等价地,是否存在伸出鉴别的工作面或鉴别的装载面上大于0.5米的最上方的长方体。代替0.5米的最小高度,也能够采取其他最小高度,从该其他最小高度起考虑测量点,例如为0.7或1米。
46.如果存在这种测量点或长方体,则输出人员可能性信号,人员可能性信号显示出在该位置处可能存在人员。附加地,当存在处与鉴别的工作面或鉴别的装载面之上小于0.5米、但是例如大于30厘米的测量点或长方体时,输出物体可能性信号,因为在这种情况下可能有某些不属于那里且例如表示绊倒危险或下放障碍的物体位于地面或装载面上。
47.如果输出人员可能性信号或物体可能性信号,则安全装置确保停止起重机移动并向控制站或起重机驾驶员和/或载重汽车驾驶员发送请求,以解释情况。
48.因此,在该实施例中,载重汽车驾驶员不应处于工作面3上,以便快速执行装载。然
而,载重汽车驾驶员应处于载重汽车5的驾驶室5b中或处于工作面3之外。
49.在该实施例或下述实施例的改进形式中,敦促驾驶员前往测定为大约2
×
2米的人员停留区域13中,如图2所示,在地面上的工作面3的拐角中标记了该人员停留区域。起重机活动只有在借助于激光扫描仪10识别出有人员可能处于人员停留区13中但是不处于工作面3上或载重汽车5的装载面5a上时才被允许。
50.在该实施例或下面描述的实施例的一个改进形式中,附加地得出在测量点云中是否存在至少一个或多个测量点,该一个或多个测量点对于载重汽车5并且特别是对于其驾驶室5b是典型的,并且这些测量点的方位在测量点云中随时间变化。据此能够识别出载重汽车5在集装箱下放过程或集装箱提升过程期间例如因为驾驶员过早疏忽开始行驶,使得能够及时停止起重机移动。
51.根据图3,现在阐述另一实施例,该实施例如先前的实施例那样不仅尤其适合于对对龙门架起重机或集装箱桥的工作区域进行运行监控,而且还适合于对港口中的下放集装箱的其他工作区域进行运行监控。
52.这例如能够是船上的工作区域,在该工作区域中短暂下放集装箱,以便手动地组装或移除集装箱连接器。
53.另外,这里描述的设施和方法也能够在港口中的集装箱转运地的其他区域中或在其他位置使用,即在人员原本没有入口但是例如意外地会到达的全自动的工作区域中的位置处使用。
54.下面根据图3和图4描述这种通用方法。
55.图3从上方示出集装箱起重机下方的工作面3,该工作面同样如图2的实施例中那样是矩形的,具有与当前使用的集装箱起重机的大小相匹配的长度和宽度。
56.激光扫描仪10从上方一次又一次地扫描图3的整个工作面3,例如每秒十次,并且在此特别检测集装箱9,该集装箱在此在以下高度中悬挂在起重机处,在该高度中,集装箱9现在或至少在进一步下降之后能够与不适宜地在工作面3上站立或在行走的人员碰撞,以及检测人员16,人员在此立于工作面3的拐角中。另外,激光扫描仪10检测集装箱9和人员16的移动方向和移动速度,移动方向和移动速度在图3中借助于箭头作为移动矢量示出。
57.在工作面3上虚拟地产生多个动态可变的区,以形成多级的危险区域和/或安全区域。例如,水平地环形围绕集装箱9虚拟地形成内部区14,并且水平环形地围绕内部区14虚拟地形成外部区15。
58.只要集装箱9不移动,则内部区14和外部区15能够小于图3所示的情况,例如使得内部区14对应于图2中的装载位置4并且外部区15对应于图2的两个分区11、12。如果集装箱9沿水平方向移动,则内部区14和外部区15沿移动方向变大,更确切地说,集装箱9移动得越快,内部区和外部区就越大,如这在图3中说明。
59.也能够围绕人员16(在图3中未示出)布设与移动方向和移动速度相关的这种动态变化的区或安全区,由此能够预知人员16的移动。如果被识别的人员16处于危险区域、即内部区14和/或外部区15中,或者如果围绕人员16的安全区开始进入外部区15中,或者相反地集装箱9接近人员16,则减慢或停止起重机的吊车、提升机构和行驶机构的相应的行驶移动。
60.特别地,同样如在图1和图2的实施例中,激光扫描仪10用光束或单光束的发散平
面的扇区同时在多个彼此间隔开的平面或线中扫描工作面3,以便由此获得测量点云,其中,在工作面3的高度的线或平面彼此间具有间距,间距的大小被确定为成,使得站立在工作面上的人员由光束的至少一个平面或单光束的至少一个射中(图4中的步骤s1)。
61.为了能够利用相对较少的平面或线以足够的可靠性识别立于工作面上的人员,该平面或线在工作面3的高度上应在地面上的至少一个方向上、例如在装载位置的纵向方向上和/或横向于此的方向上不大于30厘米,但是其中,例如10或20厘米或任何中间值的较小的最小间距也是可行的。
62.在步骤s1中获得的测量点云中还鉴别工作面3(图4中的步骤s2)。
63.然后得出在测量点云中是否存在至少一个或多个测量点,测量点对于立于所鉴别的工作面上的人员是典型的(图4中的步骤s3)。如果没有得出这种测量点,则返回步骤s1,以获得新的测量点云。
64.如果得出这种测量点,则例如当工作面3从一开始就设计成使得只要集装箱9移动在那里就不应有人员停留时,或者例如在如测试或校准行驶的特殊情况下,能够在没有其他条件的情况下减慢或停止起重机移动(图4中的步骤s4)。
65.然而,优选地,在步骤s3中附加地得出人员16或其自身的安全区是否位于外部区15中并且不位于内部区14中或与之相交。如果是,则在步骤s4中减慢起重机移动。附加地,在步骤s3中得出人员16或其自身的安全区是否位于内部区14中或与之相交。如果是,则在步骤s4中停止起重机移动。这就是说,仅当人员16或其自身的安全区不位于内部或外部区中时,才允许起重机移动。
66.优选地,也输出警告信号,更确切地说当人员16接近外部区15并且在起重机移动减慢之前时已经输出警告信号。
67.在步骤s2与s3之间或s3和s4之间能够附加地得出在测量点云中是否存在以下测量点,测量点对于载重汽车5或其驾驶室5b和/或装载面5a是典型的并且测量点的方位在测量点云中随时间变化。如果是这种情况,则这表明载重汽车5移动,于是同样停止起重机移动。
68.上面描述的方法同样能够如第一实施例那样如下扩展,即也识别工作空间中的陌生物体,特别是大于例如30厘米的陌生物体,以便必要时减慢或者停止起重机移动,使得起重机驾驶员或人员16获得了解情况的机会。意外留下的物体不仅能够存在于工作面3上,而且也能够存在于载重汽车装载面5a上,进而利用所描述的方法也能够避免在下放集装箱时的物品损坏。工作空间中的物体不仅能够根据其识别到的大小与人员区分并相应地被分类,而且也根据在那里工作的人员经常移动来区分。
69.为了还可靠地识别工作区域中的人员和物体,能够将上述作为硬件和软件提供的手段和方法与其他用于人员和物体识别的硬件部分和软件算法关联,以建立冗余工作的总系统。借助于不同的硬件部件和软件部件提高了系统的可用性进而安全性。
70.因此,除了所描述的形成所描述的安全系统或避免碰撞系统的主要部件的3d激光扫描仪10之外,还能够使用照相机,利用照相机能够附加地探测在安全或不安全区域中人员的存在。可选地也可行的是,例如集成射频识别(rfid)系统,其中,例如借助于三角法根据信号来识别工作区域中的人员,信号由人员们应随身携带的rfid应答器发送回,但是其中,在集装箱码头中也会存在没有携带rfid应答器的人员,这当然对于基于激光的人员识
别是不需要的。
71.每个不同的系统都自给自足地工作,并提供关于识别到的人员的上述信息。但是,单独系统的数据能够在评估软件中合并。如果至少一个系统应通知危险情况,则将适合于避免危险情况的措施的指示发送至起重机控制器。在理想情况下,所有现有的系统都报告相同的信息。如果系统之一报告危险情况,则对于危险情况中的可用性和安全性是足够。激光照相机、激光rfid或激光照相机rfid的这种融合也简化了工作安全性认证。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。