1.本技术涉及诊断装置。
背景技术:
2.专利文献1公开有一种电梯的控制装置中的诊断装置。该诊断装置记录设置于控制装置的电磁接触器的触点的动作次数。该诊断装置能够通过检测触点的动作次数超过规定值的情况,报告该触点的更换时期。
3.专利文献1:日本特开平5-201636号公报
4.但是,在专利文献1记载的控制装置中,电磁接触器的触点即使动作次数相同,劣化状态也会根据使用状况而不同。因此,判定电磁接触器是否处于更换状态的可靠性不高。
技术实现要素:
5.本技术正是为了解决上述问题而完成的。本技术的目的在于,提供一种能够提高判定电磁接触器的状态的可靠性的诊断装置。
6.本技术的诊断装置具有:测定信息取得部,其取得在电磁接触器的触点流过电流时测定出的所述电流的测定值、所述触点的一次侧的第一电位的测定值和所述触点的二次侧的第二电位的测定值的信息,所述电磁接触器在曳引机的制动装置中控制所述制动装置的动作;以及判定部,其根据所述测定信息取得部取得的所述电流的测定值、所述第一电位的测定值和所述第二电位的测定值,判定所述电磁接触器是否处于不健全状态。
7.发明效果
8.根据本技术,诊断装置根据流过电磁接触器的电流的测定值以及电磁接触器的一次侧和二次侧的电位的测定值,判定电磁接触器是否处于不健全状态。因此,能够提高判定电磁接触器的状态的可靠性。
附图说明
9.图1是应用实施方式1的诊断装置的电梯的结构图。
10.图2是表示应用实施方式1的诊断装置的制动器控制电路的要部的图。
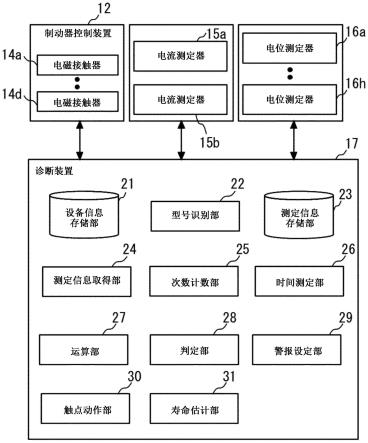
11.图3是实施方式1的诊断装置的框图。
12.图4是表示应用实施方式1的诊断装置的制动器控制电路的例子的图。
13.图5是示出表示对应用实施方式1的诊断装置的电磁接触器的触点的耐久性进行估计的方法的曲线的图。
14.图6是表示应用实施方式1的诊断装置的制动器控制电路的例子的图。
15.图7是表示能保证应用实施方式1的诊断装置的电磁接触器的接触可靠度的电流值与电压值的关系的图。
16.图8是用于说明实施方式1的诊断装置的第1诊断动作的概要的流程图。
17.图9是用于说明实施方式1的诊断装置的第2诊断动作的概要的流程图。
18.图10是应用实施方式1的诊断装置的电梯的第1变形例的结构图。
19.图11是应用实施方式1的诊断装置的电梯的第2变形例的结构图。
20.图12是实施方式1的诊断装置的硬件结构图。
21.标号说明
22.1:井道;2:机房;3:曳引机;4:制动器;4a:制动线圈;5:制动器;5a:制动线圈;6:主绳索;7a:轿厢;7b:对重;8:电源;9:控制盘;10:逆变器;11:安全装置;12:制动器控制装置;13:制动器控制用电源发生器;14a、14b、14c、14d:电磁接触器;15a、15b:电流测定器;16a、16b、16c、16d、16e、16f、16g、16h:电位测定器;17:诊断装置;21:设备信息存储部;22:型号识别部;23:测定信息存储部;24:测定信息取得部;25:次数计数部;26:时间测定部;27:运算部;28:判定部;29:警报设定部;30:触点动作部;31:寿命估计部;41a:吸收器;41c:吸收器;42a、42b、42c、42d:减流电阻;43a、43b:电流控制器;100a:处理器;100b:存储器;200:硬件。
具体实施方式
23.按照附图说明用于实施本技术的方式。另外,在各图中,对相同或相当的部分标注相同的标号。适当简化或省略该部分的重复说明。
24.实施方式1
25.图1是应用实施方式1的诊断装置的电梯的结构图。
26.在图1的电梯中,井道1贯穿未图示的建筑物的各层。机房2设置在井道1的正上方。
27.曳引机3设置在机房2。例如,曳引机3是双制动器方式。曳引机3具有制动器4和制动器5作为制动装置。制动器4和制动器5被设置成能够对曳引机3的旋转进行制动。制动器4具有制动线圈4a。制动器5具有制动线圈5a。
28.主绳索6卷挂在曳引机3。轿厢7a设置在井道1的内部。轿厢7a悬吊在主绳索6的一侧。对重7b设置在井道1的内部。对重7b悬吊在主绳索6的另一侧。
29.电源8设置在机房2。电源8是交流电源。控制盘9设置在机房2。控制盘9与电源8电连接。控制盘9被设置成能够对电梯整体的运行进行控制。控制盘9在内部具有逆变器10、安全装置11和制动器控制装置12。
30.逆变器10与曳引机3和电源8电连接。安全装置11是电磁接触器。安全装置11串联连接在电源8与逆变器10之间。安全装置11被设置成在逆变器10发生异常的情况下能够将电源8与逆变器10电切断。
31.制动器控制装置12具有由制动器控制用电源发生器13和电磁接触器14a、14b、14c、14d构成的制动器控制电路。
32.制动器控制用电源发生器13经由安全装置11而与电源8电连接。制动器控制用电源发生器13被设置成能够从端子供给直流电流。制动器控制用电源发生器13的第一端子与制动器4的制动线圈4a电连接。制动器控制用电源发生器13的第一端子与制动线圈4a形成闭合电路。制动器控制用电源发生器13的第二端子与制动器5的制动线圈5a电连接。制动器控制用电源发生器13与制动线圈5a形成闭合电路。
33.电磁接触器14a在制动器控制用电源发生器13和制动线圈4a的闭合电路中,串联连接在第一端子的 侧与制动线圈4a之间。电磁接触器14b在制动器控制用电源发生器13和
制动线圈4a的闭合电路中,串联连接在第一端子的-侧与制动线圈4a之间。
34.电磁接触器14c在制动器控制用电源发生器13和制动线圈5a的闭合电路中,串联连接在第二端子的 侧与制动线圈5a之间。电磁接触器14d在制动器控制用电源发生器13和制动线圈5a的闭合电路中,串联连接在第二端子的-侧与制动线圈5a之间。
35.电流测定器15a串联连接在电磁接触器14a的二次侧即电磁接触器14a与制动线圈4a之间。
36.电流测定器15b串联连接在电磁接触器14c的二次侧即电磁接触器14c与制动线圈5a之间。
37.电位测定器16a与电磁接触器14a的一次侧连接。电位测定器16b与电磁接触器14a的二次侧连接。电位测定器16c与电磁接触器14b的一次侧连接。电位测定器16d与电磁接触器14b的二次侧连接。
38.电位测定器16e与电磁接触器14c的一次侧连接。电位测定器16f与电磁接触器14c的二次侧连接。电位测定器16g与电磁接触器14d的一次侧连接。电位测定器16h与电磁接触器14d的二次侧连接。
39.诊断装置17在机房2的内部与控制盘9邻接设置。诊断装置17与制动器控制装置12、电流测定器15a、15b以及电位测定器16a、16b、16c、16d、16e、16f、16g、16h连接。
40.在电梯运行的情况下,制动器控制装置12通过使电磁接触器14a、14b、14c、14d各自的触点断开,向制动线圈4a、5a提供电力。此时,制动器4、5放开曳引机3。控制盘9向逆变器10发送输出特定频率的交流电流的指令。逆变器10向曳引机3提供交流电流。曳引机3根据交流电流的频率进行旋转。主绳索6随着曳引机3的旋转而移动。轿厢7a和对重7b随着主绳索6的移动而相互向相反方向升降。
41.控制盘9向制动器控制装置12发送使制动器动作的指令。制动器控制装置12通过使电磁接触器14a、14b、14c、14d各自的触点断开,切断提供给制动线圈4a、5a的电源。此时,制动器4、5对曳引机3的旋转进行制动。制动器4、5在曳引机3停止时保持曳引机3。电磁接触器14a、14b、14c、14d分别在曳引机3每次动作时进行触点开闭。
42.在电梯运行的情况下,电流测定器15a、15b测定各自连接的电路中的电流值。电流测定器15a、15b将电流值的测定值的信息发送给诊断装置17。电位测定器16a、16b、16c、16d、16e、16f、16g、16h分别测定以制动器控制用电源发生器13的负侧为基准电位连接的点的电位。电位测定器16a、16b、16c、16d、16e、16f、16g、16h将电位的测定值的信息发送给诊断装置17。
43.诊断装置17根据电流的测定值和电位的测定值,诊断电磁接触器14a、14b、14c、14d各自的健全性。诊断装置17在诊断出电磁接触器14a、14b、14c、14d中的任意一个处于不健全状态的情况下,显示催促确认该电磁接触器的健全性的警报。例如,电梯的维护人员在维护点检时确认诊断装置17的警报,点检该电磁接触器。维护人员根据该点检的结果,修理或更换该电磁接触器。
44.诊断装置17针对各个电磁接触器14a、14b、14c、14d,使用表示耐久次数的额定值的特性信息和表示触点的开闭次数的信息,估计该电磁接触器的寿命。例如,电梯的维护人员在维护点检时,根据该估计出的寿命,制定电磁接触器14a、14b、14c、14d的更换计划。
45.接着,使用图2说明在制动器控制电路中测定的电流值和电位值。
46.图2是表示应用实施方式1的诊断装置的制动器控制电路的要部的图。
47.图2的上段表示包含制动器控制用电源发生器13的第一端子和制动线圈4a的制动器控制电路。
48.图2中未图示的电流测定器15a测定流过该制动器控制电路的电流i1的值。图2中未图示的电位测定器16a、16b、16c、16d分别测定电位v1、v2、v3、v4的值。
49.图2的下段表示包含制动器控制用电源发生器13的第二端子和制动线圈5a的制动器控制电路。
50.图2中未图示的电流测定器15b测定流过该制动器控制电路的电流i2的值。图2中未图示的电位测定器16e、16f、16g、16h分别测定电位v5、v6、v7、v8的值。
51.接着,使用图3说明诊断装置17。
52.图3是实施方式1的诊断装置的框图。
53.如图3所示,诊断装置17具有设备信息存储部21、型号识别部22、测定信息存储部23、测定信息取得部24、次数计数部25、时间测定部26、运算部27、判定部28、警报设定部29、触点动作部30和寿命估计部31。
54.设备信息存储部21针对各个电磁接触器14a、14b、14c、14d存储特性信息,该特性信息是将表示该电磁接触器的制造商名称、制造商类型、制造年月日、可驱动范围电压、接触电阻值等的主要信息关联起来而成的。设备信息存储部21不仅存储与该电梯中使用的种类的电磁接触器有关的特性信息,还存储与多个型号的电磁接触器有关的特性信息。
55.型号识别部22识别作为诊断对象的电磁接触器的型号。例如,型号识别部22通过读取设置在电磁接触器的二维码来识别电磁接触器的型号。型号识别部22将已经存储在设备信息存储部21的各种信息(制造年月日、可驱动范围电压、接触电阻值等)与识别出的电磁接触器关联起来。
56.测定信息存储部23存储与制动器控制电路相关的信息。
57.测定信息取得部24从电流测定器15a、15b分别取得电流的测定值的信息。测定信息取得部24从电位测定器16a、16b、16c、16d、16e、16f、16g、16h分别取得电位的测定值的信息。测定信息取得部24使取得的电流的测定值的信息和取得的电位的测定值的信息同步地存储到测定信息存储部23。
58.次数计数部25始终监视电流测定器15a、15b测定出的电流的测定值。次数计数部25根据电流的测定值对电磁接触器14a、14b、14c、14d各自的触点闭合的动作次数进行计数。次数计数部25在每次更新动作次数时,将电磁接触器14a、14b、14c、14d各自的触点闭合的该动作次数的信息存储到测定信息存储部23。
59.时间测定部26针对各个电磁接触器14a、14b、14c、14d测定从被设置起经过的时间。
60.运算部27使用测定信息取得部24取得的来自电位测定器16b、16c的测定值,运算对制动线圈4a施加的电压值v2-v3。使用测定信息取得部24取得的来自电位测定器16f、16g的测定值,运算对制动线圈5a施加的电压值v6-v7。
61.运算部27使用测定信息取得部24取得的电位测定器16a、16b的测定值,运算对电磁接触器14a施加的电压值v1-v2。运算部27利用同样的方法,使用测定信息取得部24取得的信息,分别运算对电磁接触器14b、14c、14d施加的电压值v3-v4、v5-v6、v7-v8。
62.运算部27使用测定信息取得部24取得的电流测定器15a的测定值和来自电位测定器16a、16b的测定值,运算用以下的式(1)定义的电磁接触器14a的电阻值r1。
63.r1=(v1-v2)/i1
ꢀꢀꢀꢀꢀ
(1)
64.与电磁接触器14a同样地,运算部27使用电压值和电流值分别运算电磁接触器14b、14c、14d的电阻值r2、r3、r4。
65.运算部27在运算出电压值或电阻值的情况下,将运算出的电压值的信息或电阻值的信息存储到测定信息存储部23。
66.判定部28从设备信息存储部21取得与型号识别部22识别出的电磁接触器14a的型号对应的特性信息。判定部28从特性信息检测与电磁接触器14a的型号对应的耐久次数、电阻值的阈值等信息。
67.判定部28针对电磁接触器14a,判定次数计数部25计数出的触点的动作次数是否超过对应的耐久次数。判定部28在判定为动作次数超过耐久次数的情况下,诊断为电磁接触器14a处于不健全状态。
68.作为诊断额定值上限的上限诊断模式,判定部28判定运算部27运算出的电磁接触器14a的电阻值r1是否小于规定阈值。判定部28在判定为电阻值r1为规定阈值以上的情况下,诊断为电磁接触器14a处于不健全状态。
69.作为诊断额定值下限的下限诊断模式,判定部28判定测定信息取得部24取得的电流i1的测定值是否大于规定阈值。判定部28在判定为电流i1的测定值为规定阈值以下的情况下,诊断为流过电流i1的电磁接触器14a、14b处于不健全状态。
70.判定部28在判定为电流i1的测定值大于规定阈值时,根据时间测定部26测定出的时间,判定电磁接触器14a和电磁接触器14b的使用期间是否短于规定期间。例如,规定期间被规定成10年。判定部28在判定为使用期间为规定期间以上的情况下,诊断为电磁接触器14a、14b处于不健全状态。
71.判定部28判定运算部27运算出的电压值v2-v3是否大于制动线圈4a的驱动有效电压vbk。判定部28在判定为电压值v2-v3为驱动有效电压vbk的值以下时,诊断为电磁接触器14a、14b处于不健全状态。
72.判定部28判定运算部27运算出的电压值v6-v7是否大于制动线圈5a的驱动有效电压vbk。判定部28在判定为电压值v6-v7为驱动有效电压vbk的值以下的情况下,诊断为电磁接触器14c、14d处于不健全状态。
73.判定部28对电磁接触器14b、14c、14d进行与对电磁接触器14a进行的动作相同的动作。
74.在判定部28中判定为电磁接触器14a处于不健全状态的情况下,警报设定部29判定是否设定有与电磁接触器14a有关的警报。警报设定部29在判定为未设定与电磁接触器14a有关的警报的情况下,设定与电磁接触器14a有关的警报。具体而言,警报设定部29存储表示与电磁接触器14a有关的警报为“有”的信息。警报设定部29使诊断装置17显示该警报。
75.警报设定部29对电磁接触器14b、14c、14d进行与对电磁接触器14a进行的动作相同的动作。
76.在判定部28中判定为电流i1的测定值为规定阈值以下的情况下,触点动作部30判定为电磁接触器14a的触点和电磁接触器14b的触点中的至少一方的接触电阻值超过规定
的电阻值。触点动作部30在判定为接触电阻值超过规定的电阻值的情况下,生成如下的指令:在电梯休息中等服务停止中,在不对电磁接触器14a的触点和电磁接触器14b的触点施加电压的状态下强制地使其开闭规定次数。触点动作部30对制动器控制装置12发送该指令。
77.寿命估计部31从设备信息存储部21取得与型号识别部22识别出的电磁接触器14a的型号对应的特性信息。寿命估计部31通过将在时间测定部26测定出的任意时间的期间次数计数部25计数出的电磁接触器14a的触点的动作次数除以该任意时间的值,运算电磁接触器14a的触点的每单位时间的动作次数。寿命估计部31通过将特性信息中包含的与电磁接触器14a的型号对应的耐久次数除以每单位时间的动作次数,估计电磁接触器14a的寿命。寿命估计部31使测定信息存储部23存储估计出的电磁接触器14a的寿命。寿命估计部31进行按照每个规定期间估计表示电磁接触器14a的寿命的信息的动作。例如,寿命估计部31从设置电磁接触器14a起一个月后进行估计寿命的动作。
78.寿命估计部31对电磁接触器14b、14c、14d进行与对电磁接触器14a进行的动作相同的动作。
79.接着,使用图4和图5,说明估计制动器控制电路的耐久性的方法的第一例。
80.图4是表示应用实施方式1的诊断装置的制动器控制电路的例子的图。图5是示出表示对应用实施方式1的诊断装置的电磁接触器的触点的耐久性进行估计的方法的曲线的图。
81.图4表示制动线圈直切控制方式的制动器控制电路的例子。另外,在采用双重制动器方式的情况下,制动线圈5a也可以通过单点划线所示的电路而与制动器控制用电源发生器13连接。此时,结构与图2所示的制动器控制电路不同。
82.吸收器41a、41b分别与制动线圈4a,5a并联连接。减流电阻42a、42b分别与制动线圈4a、4b并联连接。减流电阻42c、42d分别与制动线圈4a、5a串联连接。
83.在电磁接触器14a、14b的触点断开的情况下,制动线圈4a、5a的电力被切断。此时,由于流过该触点的大电流,在该触点产生电弧放电。触点受到该电弧放电的影响而劣化。
84.由电弧放电产生的能量e由以下的式(2)定义。
85.e=v*i*t
ꢀꢀꢀꢀꢀꢀ
(2)
86.在式(2)中,v是对触点施加的电压值。i是流过触点的电流值。t是电弧放电发生的时间。
87.在图5中,示出表示能保证触点的耐久性的动作次数与使用电流的关系的曲线的图。纵轴是能保证触点的耐久性的动作次数。横轴是额定流过触点的电流值。另外,能保证触点的耐久性的动作次数的特性按照电磁接触器的型号而不同。
88.直线l1表示假定电压v为dc120v且电弧放电时间t恒定时的、能保证耐久性的动作次数与使用电流的关系。直线l2表示假定电压v为dc120 av且电弧放电时间t恒定时的、能保证耐久性的动作次数与使用电流的关系。
89.流过触点的电流值越大,则能保证触点的耐久性的动作次数越少。对触点施加的电压值越大,则能保证触点的耐久性的动作次数越少。以该关系为依据进行诊断装置17进行的上限诊断模式。
90.例如,根据由某个电磁接触器测定出的电流的测定值、对触点施加的电压的测定
值和该电磁接触器的耐久性的特性,能够估计在该电磁接触器中能保证触点的耐久性的动作次数。该电磁接触器的可使用年数能够通过将能保证该触点的耐久性的动作次数除以每实际期间的动作次数来估计。根据该可使用年数,能够估计该电磁接触器的更换周期。
91.这里,关于电磁接触器的特性信息,使用由各制造商公开的数值。该公开的数值是基于一般规格的数值。公开的数值的实力值按照每个制造商或按照每个型号而不同。例如,实力值对图5所示的曲线的形状带来影响。能够根据基于从初始状态起使用的实绩的实测值来计算实力值。通过在电磁接触器的特性信息中反映实力值,能够将电磁接触器的特性信息更新成最佳值。通过将电磁接触器的特性信息更新成最佳值,能够估计适合于使用用途的可使用年数。因此,能够针对电磁接触器的寿命进行最佳的诊断。
92.接着,使用图6和图7,说明估计制动器控制电路的耐久性的方法的第二例。
93.图6是表示应用实施方式1的诊断装置的制动器控制电路的例子的图。图7是表示能保证应用实施方式1的诊断装置的电磁接触器的接触可靠度的电流值与电压值的关系的图。
94.图6表示制动线圈电流控制方式的制动器控制电路的例子。另外,在采用双重制动器方式的情况下,制动线圈5a也可以通过单点划线所示的电路而与制动器控制用电源发生器13连接。电磁接触器14c可以与电磁接触器14b并联连接。此时,结构与图2所示的制动器控制电路不同。
95.吸收器41c、41d分别与制动线圈4a、5a并联连接。电流控制器43a、43b分别与制动线圈4a、5a串联连接。电流控制器43a、43b是控制分别流过制动线圈4a、5a的电流的半导体元件。例如,电流控制器43a、43b对流过的电流进行斩波控制。
96.在制动线圈电流控制方式中,电流控制器43a、43b通过控制电流的大小来分别控制制动线圈4a、5a。此时,在电磁接触器14a、14b、14c中,触点开闭时流过的电流值较小。因此,几乎不发生电弧放电。因此,在电磁接触器14a、14b、14c中,能抑制触点的消耗。另一方面,由于流过的电流值较小,因而该电磁接触器的寿命取决于接触可靠性。当接触电阻值由于生成触点覆膜而上升的情况下,接触可靠性降低。这里,接触可靠性是在电磁接触器的触点处发生导通不良的可能性的指标。接触可靠度的值由以下的式(3)定义。
97.接触可靠度=导通不良次数*系数/总开闭触点数
ꢀꢀꢀꢀꢀꢀ
(3)
98.式(3)中的系数是根据jis规定的值。式(3)中的总开闭触点数由以下的式(4)定义。
99.总开闭触点数=使用触点数*开闭次数
ꢀꢀꢀꢀꢀ
(4)
100.式(4)中的使用触点数是电磁接触器具有的触点的数量。此外,设置有多个电磁接触器的装置整体的接触可靠度的值,是通过对式(4)的总开闭触点数的值乘以设置有多个电磁接触器的台数的值而计算出的。
101.图7示出表示能保证电磁接触器的接触可靠性的电流值与电压值的关系的例子的曲线。纵轴是流过电磁接触器的触点的电流值。横轴是对电磁接触器的触点施加的电压值。
102.当电压值在av~bv之间并且电流值为xma以上时,能保证电磁接触器的接触可靠性。当电压值在bv~cv之间并且电流值为yma以上时,能保证电磁接触器的接触可靠性。另一方面,当电压值在av~bv之间并且电流值小于xma时,在电磁接触器中容易发生接触不良。以该关系为依据来进行诊断装置17进行的下限诊断模式。
103.例如,能够根据由某个电磁接触器测定出的电流的测定值和对触点施加的电压的测定值,判定是否能保证该电磁接触器的接触可靠性。
104.接着,使用图8说明诊断装置17进行的包含上限诊断模式的动作的第1诊断动作。
105.图8是用于说明实施方式1的诊断装置的第1诊断动作的概要的流程图。
106.图8表示诊断装置17对电磁接触器14a、14b进行的第1诊断动作。诊断装置17在设置电磁接触器14a或14b时开始第1诊断动作。
107.在步骤s001中,诊断装置17判定电磁接触器14a或14b的触点是否闭合。
108.在步骤s001中判定为触点未闭合的情况下,诊断装置17反复进行步骤s001的动作。
109.在步骤s001中判定为触点闭合的情况下,诊断装置17进行步骤s002的动作。在步骤s002中,诊断装置17将电磁接触器14a或14b的触点闭合的动作次数相加。
110.然后,诊断装置17进行步骤s003的动作。在步骤s003中,诊断装置17判定电磁接触器14a或14b的动作次数是否为规定的耐久次数以上。
111.在步骤s003中判定为动作次数小于规定的耐久次数的情况下,诊断装置17进行步骤s004的动作。在步骤s004中,诊断装置17从电位测定器16a、16b、16c、16d分别取得电位v1、v2、v3、v4的测定值的信息。
112.然后,诊断装置17进行步骤s005的动作。在步骤s005中,诊断装置17判定对制动线圈4a施加的电压值v2-v3是否大于驱动有效电压vbk的值。
113.在步骤s005中,在判定为电压值v2-v3大于驱动有效电压vbk的值的情况下,诊断装置17进行步骤s006的动作。在步骤s006中,诊断装置17存储电压值v2-v3。
114.然后,诊断装置17进行步骤s007的动作。在步骤s007中,诊断装置17从电流测定器15a取得电流i1的测定值的信息。
115.然后,诊断装置17进行步骤s008的动作。在步骤s008中,诊断装置17计算电磁接触器14a的电阻值r1和电磁接触器14b的电阻值r2。
116.然后,诊断装置17进行步骤s009的动作。在步骤s009中,诊断装置17判定电阻值r1的值和电阻值r2的值是否小于规定阈值。
117.在步骤s009中判定为电阻值r1的值和电阻值r2的值小于规定阈值的情况下,诊断装置17进行步骤s010的动作。在步骤s010中,诊断装置17记录电阻值r1和电阻值r2的值。
118.在进行步骤s010的动作后,诊断装置17反复进行从步骤s001起的动作。
119.在步骤s003中判定为电磁接触器14a、14b中的任意一个的动作次数为规定的耐久次数以上的情况下,诊断装置17进行步骤s011的动作。在步骤s011中,诊断装置17判定是否设定有与该电磁接触器有关的警报。
120.在步骤s011中判定为设定有警报的情况下,诊断装置17进行从步骤s004起的动作。
121.在步骤s011中判定为未设定警报的情况下,诊断装置17进行步骤s012的动作。在步骤s012中,诊断装置17设定与该电磁接触器有关的警报。然后,诊断装置17进行从步骤s004起的动作。
122.在步骤s005中判定为电压值v2-v3为驱动有效电压vbk的值以下的情况下,诊断装置17进行步骤s013的动作。在步骤s013中,诊断装置17判定是否设定有与电磁接触器14a和
电磁接触器14b有关的警报。
123.在步骤s013中判定为设定有与电磁接触器14a和电磁接触器14b有关的警报的情况下,诊断装置17进行从步骤s007起的动作。
124.在步骤s013中判定为未设定与电磁接触器14a和电磁接触器14b中的至少一方有关的警报的情况下,诊断装置17进行步骤s014的动作。在步骤s014中,诊断装置17设定与电磁接触器14a和电磁接触器14b有关的警报。然后,诊断装置17进行从步骤s007起的动作。
125.在步骤s009中判定为电阻值r1的值和电阻值r2的值中的至少一方为规定阈值以上的情况下,诊断装置17进行步骤s015的动作。在步骤s015中,诊断装置17判定连续次数是否为规定次数以上,连续次数是判定为该电磁接触器的电阻值为规定的电阻值以上的次数。
126.在步骤s015中判定为连续次数小于规定次数的情况下,诊断装置17进行从步骤s004起的动作,连续次数是该电磁接触器的电阻值为规定的电阻值以上的次数。
127.在步骤s015中判定为连续次数为规定次数以上的情况下,诊断装置17进行步骤s016的动作,连续次数是该电磁接触器的电阻值为规定的电阻值以上的次数。在步骤s016中,诊断装置17设定与该电磁接触器有关的警报。然后,诊断装置17反复进行从步骤s001起的动作。
128.诊断装置17对电磁接触器14c、14d进行与对电磁接触器14a、14b进行的动作相同的第1诊断动作。
129.接着,使用图9说明诊断装置17进行的下限诊断模式的动作即第2诊断动作。
130.图9是用于说明实施方式1的诊断装置的第2诊断动作的概要的流程图。
131.图9表示诊断装置17对电磁接触器14a、14b进行的第2诊断动作。诊断装置17在从电流测定器15a取得了电流i1的测定值的信息时进行第2诊断动作。具体而言,例如,诊断装置17在进行第1诊断动作中的步骤s007的动作之后,进行第2诊断动作。
132.在步骤s101中,诊断装置17判定电流i1的测定值是否大于规定阈值。
133.在步骤s101中判定为电流i1的测定值大于规定阈值的情况下,诊断装置17进行步骤s102的动作。在步骤s102中,诊断装置17判定电磁接触器14a和电磁接触器14b的使用期间是否短于规定期间。
134.在步骤s102中判定为使用期间短于规定期间的情况下,诊断装置17结束动作。
135.在步骤s101中判定为电流i1的测定值为规定阈值以下的情况下,或者在步骤s102中判定为电磁接触器14a和电磁接触器14b中的至少一方的使用期间为规定期间以上的情况下,诊断装置17进行步骤s103的动作。在步骤s103中,诊断装置17判定是否设定有与使用期间为规定期间以上的电磁接触器有关的警报。
136.在步骤s103中判定为未设定警报的情况下,诊断装置17进行步骤s104的动作。在步骤s104中,诊断装置17设定与该电磁接触器有关的警报。然后,诊断装置17结束动作。
137.在步骤s103中判定为设定有警报的情况下,诊断装置17结束动作。
138.诊断装置17对电磁接触器14c、14d进行与对电磁接触器14a、14b进行的动作相同的第2诊断动作。
139.根据以上说明的实施方式1,诊断装置17具有测定信息取得部24和判定部28。判定部28根据电流的测定值、电磁接触器的触点的一次侧的第一电位的测定值和电磁接触器的
触点的二次侧的第二电位的测定值,判定该电磁接触器是否处于不健全状态。因此,诊断装置17能够根据在控制电梯的装置中实际测定出的信息来判定电磁接触器的状态。其结果是,能够提高判定电磁接触器的状态的可靠性。
140.此外,诊断装置17具有运算部27。判定部28进行如下的上限诊断模式:根据运算部运算出的触点的电阻值判定为电磁接触器处于不健全状态。因此,能够预先避免电磁接触器的触点处的接触不良。
141.此外,诊断装置17进行下限诊断模式。因此,在应用电流控制器的制动器控制电路中,能够判定电磁接触器的状态。其结果是,能够根据制动器控制电路的规格进行电磁接触器的诊断。
142.此外,诊断装置17具有触点动作部30。因此,诊断装置17通过对触点施加摩擦、振动、冲击等刺激,能够除去成为触点的电阻值上升原因的微小异物。此外,能够改善触点处的接触面的氧化腐蚀。
143.此外,诊断装置17具有设备信息存储部21、型号识别部22、时间测定部26、次数计数部25和寿命估计部31。因此,诊断装置17能够根据在控制电梯的装置中实际测定出的信息来估计电磁接触器的寿命。其结果是,能够提高电磁接触器的估计寿命的可靠性。
144.另外,诊断装置17也可以通过根据测定信息取得部24取得的电流的测定值和电位的测定值估计能保证耐久性的动作次数而不是估计耐久性的额定值,估计电磁接触器14a、14b、14c、14d的寿命。此时,运算部27估计能保证耐久性的动作次数。因此,能够根据在控制电梯的装置中实际测定出的信息来判定电磁接触器的状态。
145.另外,判定部28也可以判定次数计数部25计数出的触点的动作次数是否超过任意设定的耐久次数。具体而言,该任意设定的耐久次数可以是由维护人员预先设定的次数。例如,维护人员也可以经验性地考虑现场的环境给设备的寿命带来的影响,在判断为设备的寿命很快到来的情况下,将该耐久次数设定成比在产品中推荐的值小的值。因此,能够根据与电磁接触器的触点处的劣化状态独立的判定基准,判定电磁接触器是否处于不健全状态。
146.另外,判定部28也可以在测定信息取得部24取得了电位v1、v2、v3、v4的测定值时,确认制动器控制用电源发生器13施加的电压值与(v1-v2) (v2-v3) (v3-v4)的计算值相等。
147.另外,诊断装置17也可以代替设定与电磁接触器有关的警报,而设定表示点检电磁接触器的警报。
148.另外,诊断装置17也可以始终从电流测定器15a、15b取得电流的测定值的信息。此时,诊断装置17也可以始终进行第2诊断动作。
149.另外,诊断装置17也可以根据制动线圈的控制方式,仅进行上限诊断模式和下限诊断模式中的任意一方。
150.另外,诊断装置17也可以设置在控制盘9的内部。
151.图10是应用实施方式1的诊断装置的电梯的第1变形例的结构图。图11是应用实施方式1的诊断装置的电梯的第2变形例的结构图。
152.如图10所示,诊断装置17能够应用于制动线圈4a和制动线圈5a并联连接的制动器控制电路。
153.如图11所示,诊断装置17能够应用于单制动器方式的制动器控制电路。
154.接着,使用图12说明构成诊断装置17的硬件的例子。
155.图12是实施方式1的诊断装置的硬件结构图。
156.诊断装置17的各功能能够通过处理电路来实现。例如,处理电路具有至少一个处理器100a和至少一个存储器100b。例如,处理电路具有至少一个专用硬件200。
157.在处理电路具有至少一个处理器100a和至少一个存储器100b的情况下,诊断装置17的各功能通过软件、固件或者软件和固件的组合来实现。软件和固件中的至少一方被记作程序。软件和固件中的至少一方存储在至少一个存储器100b中。至少一个处理器100a读取并执行存储在至少一个存储器100b中的程序,从而实现诊断装置17的各功能。至少一个处理器100a也称作中央处理装置、处理装置、运算装置、微处理器、微计算机、dsp。例如,至少一个存储器100b是ram、rom、闪存、eprom、eeprom等非易失性或易失性的半导体存储器、磁盘、软盘、光盘、紧凑盘、迷你盘、dvd等。
158.在处理电路具有至少一个专用硬件200的情况下,处理电路例如由单一电路、复合电路、程序化的处理器、并行程序化的处理器、asic、fpga或者它们的组合来实现。例如,诊断装置17的各功能分别由处理电路实现。例如,诊断装置17的各功能统一由处理电路实现。
159.关于诊断装置17的各功能,也可以通过专用硬件200实现一部分,通过软件或固件实现其他部分。例如,通过作为专用硬件200的处理电路来实现识别作为诊断对象的电磁接触器的型号的功能,通过至少一个处理器100a读取并执行存储在至少一个存储器100b中的程序,实现除了识别作为诊断对象的电磁接触器的型号的功能以外的功能。
160.这样,处理电路通过硬件200、软件、固件或者它们的组合来实现诊断装置17的各功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
