1.本发明涉及汽车转向技术领域,具体涉及一种冗余大扭矩电动转向装置及其控制方法。
背景技术:
2.目前车辆用电动助力转向装置分别针对于乘用车的齿轮齿条式电动助力转向器和商用车的循环球式电动助力转向器两种。电动助力转向装置具有高效节能,结构紧凑,安装使用维护方便,可以提供随速助力转向和主动回正,能够兼顾低速转向轻便性和高速转向“路感”,其中,齿轮齿条结构主要适用于乘用车。
3.林逸等人申请了《循环球式电动助力转向器》申请号:200510055247.4的循环球式电动助力转向系统,该转向器形式近年来在轻卡上已经实现产品化。但是由于滚珠丝杠结构的机械强度限制,无法满足转向器输出大扭矩的需求。中重型商用车还需要依赖于液压动力系统加上电动助力转向的结构形式,来满足辅助驾驶和自动驾驶对于转向系统的需求。相比于电动助力转向,液压助力系统油泵一直运转会增加转向系统能耗,不利于节能减排,并且液压系统本身存在漏油与维护问题,这大大提高了转向系统的维护成本,液压油还会造成环境污染。油泵、皮带轮、液压管路等元件占用空间,不好布置,低温工作性能也较差。
4.当前,汽车产业的智能化发展正在不断加速,商用车的智能化发展对电动化转向系统的需求迫切。为了实现中重型商用车的纯电动化,需要克服传统电动助力的结构限制,寻找一种具有承载能力强、寿命长的转向执行机构。双电机驱动的转向装置采用两个电机耦合驱动的形式执行转向操作,解决单电机输出转矩不足的问题,而且双电机中其中一个电机失效,在车辆行驶过程中转向负载不大的情况下,仍然能够完成转向功能,具有冗余容错性。但是采用双电机同步会带来一些问题,当两个电机的结构参数、负载扰动、电流扰动等问题会出现双电机不同步的现象,从而降低转向效率,加重电机的转向装置负担,减小使用寿命;对于具有强机械耦合的转向系统的双电机,两电机之间的强机械耦合会使得二者之间的转角和转速误差较小,但是由于二者的驱动能力不一致,驱动能力好的电机会被驱动能力差的电机反拖,驱动能力差的电机会被驱动能力好的电机主动带动,而二者之间的互相对拖会导致两电机的空载电流升高、平均转速下降,可能会导致双电机发热严重。
技术实现要素:
5.本发明的目的在于提供一种冗余大扭矩电动转向装置及其控制方法,以解决现有技术中存在的问题。
6.为实现上述目的,本发明采用的技术方案是:一种冗余大扭矩电动转向装置,包括:主-副电动转向装置和曲柄环板式行星齿轮转向装置;其中,所述主-副电动转向装置设置有主电动转向装置和副电动转向装置;所述主-副电动装置分别由电机、蜗轮蜗杆减速机构、控制器组成,所述控制器根据车速、方向盘转矩及转角信号控制所述主-副电动转向装
置提供助力;所述曲柄环板式行星齿轮转向装置设置有锥齿轮传动副和曲柄环板式行星齿轮传动副,所述主电动转向装置的输出端与所述曲柄环板式行星齿轮传动副中的高速输入轴固连,所述副电动转向装置的输出端与所述曲柄环板式行星齿轮传动副中的高速辅助轴固接;方向盘的手力矩与所述主电动装置输出的助力以及所述副电动装置的输出助力叠加后,经所述曲柄环板式行星齿轮传动副降速增扭输出到转向摇臂上。
7.可选实施例中,所述曲柄环板式行星齿轮传动副由曲柄输入轴、曲柄助力轴、输出轴、偏心轴套、滚子轴承、板环、内齿轮组成;所述曲柄输入轴与所述曲柄助力轴上分别安装有三个成120
°
的偏心轴套,所述板环的两侧位置加工有孔并安装有滚子轴承,所述板环的中心位置加工有齿圈,所述曲柄输入轴与所述曲柄助力轴上的偏心轴套分别与所述板环的两侧孔内的所述滚子轴承配合,所述输出轴上安装有内齿轮,所述内齿轮与所述板环的中心齿圈配合。
8.可选实施例中,所述锥齿轮传动副由输入轴传感器组件中的主动锥齿轮和转向装置输入轴上的从动锥齿轮组成。
9.可选实施例中,所述曲柄环板式行星齿轮转向装置的壳体上安装有由转角转矩传感器安装壳体、输入轴、扭杆、转矩转角传感器、主动锥齿轮、传感器盖、上下轴承所组成的输入轴传感器组件;所述扭杆布置在所述输入轴与所述主动锥齿轮轴之间,所述扭杆与所述输入轴通过直销固定连接,所述扭杆与所述主动锥齿轮轴通过花键过盈固连,所述输入轴与所述主动锥齿轮轴之间设有机械限位,配合所述转矩转角传感器实现方向盘力矩和角度的采集。
10.可选实施例中,所述主-副电动装置由蜗轮蜗杆传动副、电机组成;所述蜗轮蜗杆传动副中的蜗杆与所述电机通过凸爪联轴器对接,所述蜗杆与蜗轮啮合,所述蜗轮通过键连接安装在所述曲柄的输入轴上。
11.可选实施例中,所述电机中的第一电机、第二电机单独工作或同时工作。一种冗余大扭矩电动转向装置具有人工驾驶模式下的助力转向功能和自动驾驶模式下的主动转向功能。
12.另一方面,本发明实施例还提供了一种如上所述的一种冗余大扭矩电动转向装置的控制方法,包括:根据转矩转角传感器获得方向盘转角值,根据can总线信息获得自动驾驶下目标方向盘转角控制值;根据第一电机的电机位置传感器获得第一电机的实时转角,根据第二电机的电机位置传感器获得第二电机的实时转角;根据第一电机的参考转速和实际转速计算第一电机的速度偏差,根据第二电机的参考转速和实际转速计算第二电机的速度偏差;根据第一电机的参考电流和实际电流计算第一电机的电流偏差,根据第二电机的参考电流和实际电流计算第二电机的电流偏差。
13.可选实施例中,目标方向盘转角和转矩转角传感器得到的实际转向盘转角的差值,经过模糊pid控制调节得到目标转向盘转速;所述目标方向盘转速经过传动比换算成所述第一、第二电机的参考转速。
14.可选实施例中,所述模糊pid控制的输入是偏差和偏差变化率,模糊推理基于模糊规则表。
15.可选实施例中,所述第一电机的参考转速和实际转速经过pi调节得到所述第一电机的参考电流;所述第二电机的参考转速和实际转速经过pi调节得到所述第二电机的参考
电流;所述第一电机的参考电流和实际电流经过pi调节得到所述第一电机的控制电压;所述第二电机的参考电流和实际电流经过pi调节得到所述第二电机的控制电压;根据所述第一电机的实际转速和所述第二电机的实际转速,通过滑模同步控制得到同步电流补偿控制量,所述同步电流补偿控制量均分补偿给第一电机和第二电机的参考电流上;所述pi控制的控制参数是遗传算法优化得到,所述遗传算法的优化目标函数的输入包括所述第一电机的参考转速和实际转速及所述第二电机的参考转速和实际转速。
16.本发明的有益效果在于:
17.(1)本发明中的一种冗余大扭矩电动转向装置实现了在纯电动转向装置上的大扭矩输出、长寿命运行,解决了传统因滚珠丝杠结构因强度不足等原发性缺陷导致的无法纯电动化问题。
18.(2)本发明中的一种冗余大扭矩电动转向装置相较于传统循环球转向装置,具有合理布置多电机工作的天然优势,其曲柄输入轴与曲柄助力轴的双重输入作用,为多电机工作提供了天然的装配优势;且配合曲柄环板式行星齿轮传动机构少齿差传动大负载的特点,更适用于中重型商用车的大负载转向系统,而且双电机中其中一个电机失效,在车辆行驶过程中转向负载不大的情况下,仍然能够完成转向功能,具有冗余容错性。
19.(3)本发明中的控制方法根据转向盘转角的目标值和转向转角传感器采集到的实际转角值,通过模糊pid控制双电机的参考转速,利用遗传优化算法对速度pi控制中的控制参数进行优化,提高pi控制的速度与精度,设计滑模速度同步控制器对双电机的电流进行补偿,提高转向双电机的位置伺服一致性和同步控制精度。
附图说明
20.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
21.图1是双电机驱动的曲柄环板式行星齿轮智能电动转向系统原理图。
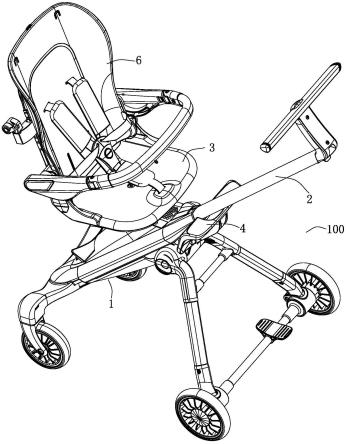
22.图2是本发明一种冗余大扭矩电动转向装置主视图。
23.图3是本发明一种冗余大扭矩电动转向装置剖视图。
24.图4是本发明双电机主动转向模式下位置伺服同步控制策略图。
25.图5是本发明遗传优化算法流程图。
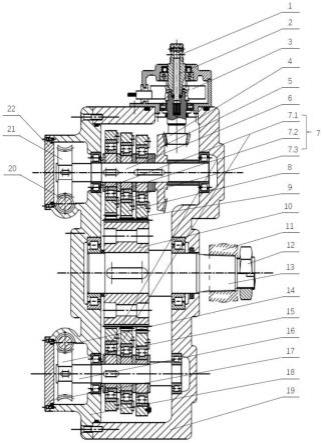
26.图中,1-输入轴,2-扭杆,3-转角转矩传感器,4-主动锥齿轮,5-从动锥齿轮,6-曲柄轴一,7-曲柄环板式行星齿轮副一,7.1-偏心轴套,7.2-滚子轴承,7.3-板环,8-曲柄环板式行星齿轮副二,9-曲柄环板式行星齿轮副三,10-输出轴齿轮,11-输出轴,12-摇臂螺母,13-转向摇臂,14-蜗杆,15-蜗轮,16-曲柄轴二,17-减速装置端盖,18-转向装置端盖,19-转向装置壳体,20-蜗杆二,21-蜗轮二,22-减速装置端盖二,23-第一电机,24-第一法兰盘,25-第二电机,26-第二法兰盘。
具体实施方式
27.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结
合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
28.需要说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接或者间接位于该另一个部件上。当一个部件被称为“连接于”另一个部件,它可以是直接或者间接连接至该另一个部件上。术语“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是为了便于描述,不能理解为对本技术方案的限制。术语“第一”、“第二”仅用于便于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明技术特征的数量。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
29.本实施例的目的在于提供了一种冗余大扭矩电动转向装置,如附图2所示,本实施例中第一电机23与转向装置壳体19通过第一法兰盘24装配连接,第一电机23的转子与蜗杆14通过联轴器固定连接,第二电机25与转向装置壳体19通过第二法兰盘26装配连接,第二电机25转子与蜗杆20通过联轴器固连,实现了助力装置与转向装置的助力传递。
30.现对曲柄环板式行星齿轮电动转向装置的内部结构进行阐明:
31.如附图3所示,本实施例中的转向手力矩从转向装置的输入轴1中输入,转向装置的输入轴1上设有扭杆2,扭杆2与转矩转角传感器3配合采集转矩转角信号。转矩转角传感器3为非接触式扭矩传感器,与角度传感器一体化。转向装置的输入轴1的输出端加工有主动锥齿轮4,与从动锥齿轮5的啮合,实现与曲柄轴一6的动力传递,曲柄轴一6上通过平键安装有偏心轴套7.1,板环7.3的两侧设有侧孔,偏心轴套7.1通过滚子轴承7.2与板环7.3上的侧孔配合,偏心轴套7.1、滚子轴承7.2与板环7.3共同构成曲柄环板式行星齿轮副一7,完成曲柄轴一6与曲柄轴二16上的动力传递到输出轴13的过程,在传动过程中,由于滚子轴承7.2使滑动摩擦变为滚动摩擦,摩擦阻力大大减小。类似地,曲柄轴一6上安装有曲柄环板式行星齿轮副二8与曲柄环板式行星齿轮副三9,曲柄环板式行星齿轮副二7、曲柄环板式行星齿轮副二8与曲柄环板式行星齿轮副三9存在120
°
相位差,需要指出的是,曲柄环板式行星齿轮传统机构在运动到曲柄与连杆共线位置时,由于传动角为0
°
,会出现死点,而由于并列的三组曲柄环板式行星齿轮机构在相位上相差120
°
,三组机构不可能同时处于死点位置,则可保证在工作过程中传动的连续性。且曲柄环板式行星齿轮传动机构的传动原理是曲柄连杆机构与齿轮齿圈机构,可以实现较大的力传动,且由于曲柄环板式行星齿轮传动机构存在三相叠加传动,其传动性能相较于滚珠丝杠更为优越。板环7.3中间设有齿圈与输出轴齿轮10啮合,其滚动摩擦在表面处理后进一步减小,磨损极小,大大提高使用寿命,输出轴齿轮10通过平键与转向摇臂13上的输出轴配合,输出轴上加工有锥花键,以安装转向摇臂13,输出轴锥花键外端加工有螺纹,转向摇臂11通过摇臂螺母12与输出轴螺纹配合紧固。上述传动结构还具有高精度、体积小、拆卸方便、环境适应能力强、低噪音的特点。综上,曲柄环板式行星齿轮电动转向装置可以用于大负载,工作条件恶劣的场合。
32.如附图3所示,本实施例中,曲柄轴一6左端布置有平键,蜗轮21通过该平键与曲柄轴一6固定连接,蜗轮21与蜗杆20啮合,且蜗杆20的展开螺旋角大于蜗轮21与蜗杆20的接触摩擦角,保证蜗轮蜗杆传动副不自锁。本实施例中,曲柄轴二16左端布置有平键,蜗轮15通过该平键与曲柄轴二16固定连接,蜗轮15与蜗杆14啮合,且蜗杆14的展开螺旋角大于蜗轮15与蜗杆14的接触摩擦角,保证蜗轮蜗杆传动副不自锁。
33.继续参见附图3,本实施例中,转向装置壳体集成有电动装置安装壳体与输入轴1、转角转矩传感器安装壳体,两个蜗轮蜗杆传动副通过减速装置端盖一17与减速装置端盖二22实现密封。
34.当方向盘上面的有手力矩之后扭杆2产生变形,转矩转角传感器3检测到力矩信号,根据助力策略,第一电机23经过包括蜗杆14蜗轮15的蜗轮蜗杆减速机构降速增扭,输出助力力矩作用于曲柄轴一6上,第二电机25经过包括蜗杆20蜗轮21的蜗轮蜗杆减速机构减速增矩,输出一个助力力矩作用于曲柄轴二16上。
35.手力矩经转向装置输入轴1传递,通过主动锥齿轮与从动锥齿轮组成的锥齿轮传动副调速换向后传递到曲柄输入轴2上,在曲柄轴一6上与第一电机23的助力力矩耦合。然后经偏心轴套4与滚子轴承5传递到曲柄环板式行星齿轮副二7、曲柄环板式行星齿轮副二8与曲柄环板式行星齿轮副三9上。副电动装置输出的助力力矩经相同传递过程传递到曲柄环板式行星齿轮副二7、曲柄环板式行星齿轮副二8与曲柄环板式行星齿轮副三9上。手力矩与第一电机23的助力力矩组成的耦合力矩,与第二电机25的助力力矩在曲柄环板式行星齿轮副二7、曲柄环板式行星齿轮副二8与曲柄环板式行星齿轮副三9上耦合,经板环中心齿圈与内齿轮13减速增矩后,传递到转向装置输出轴11上,通过转向摇臂13等机械结构带动车轮转动,完成进行转向动作。
36.可选实施例中,所述电机中的第一电机、第二电机单独工作或同时工作。一种冗余大扭矩电动转向装置具有人工驾驶模式下的助力转向功能和自动驾驶模式下的主动转向功能。另一实施例中,提供了一种冗余大扭矩电动转向装置的控制方法,根据转向盘转角的目标值和转矩转角传感器3采集到的实际转角值,通过模糊pid控制器对上层转角进行控制,得到控制律作为双电机的参考转速;利用遗传优化算法对速度pi控制中的控制参数kp和ki进行优化,提高pi控制的速度与精度,并设计滑模速度同步控制器对双电机的电流进行补偿。
37.需要指出的是,所述模糊pid控制器按照如下步骤建立,如附图4所示:
38.步骤1:确定模糊pid转角控制器的观测量和控制量,将目标转向盘转角和转向盘转角实际值的差值e及其变化率δe作为观测量,选取pid控制器的比例系数、积分系数和微分系数的调节量δkp、δki、δkd作为控制量;
39.步骤2:确定变量模糊化,根据输入量的变化范围将输入量分为7个模糊集,即nb(负大)、nm(负中)、ns(负小)、z(零)、ps(正小)、pm(正中)、pb(正大),其中输入量e的变化范围为[-10,10],δe的变化范围为[-30,30],;同样将控制量划分为7个等级,即nb(负大)、nm(负中)、ns(负小)、z(零)、ps(正小)、pm(正中)、pb(正大),输出量δkp的控制范围为[-6,6],δki的控制范围为[-0.12,0.12],δkd的控制范围为[-6,6];
[0040]
步骤3:建立pid参数模糊控制规则表,设计模糊规则时需要遵循以下规则:|e|较大时,为了提高系统的响应速度同时避免系统超调,k
p
值应变大,kd值应减小,ki应取0;|e|较小|δe|较大时,为避免系统在平衡处出现振荡,提高系统稳态性能,k
p
、kd、ki应都取较大值;|e|、|δe|都较小时,k
p
、ki应取较大值,kd取较小值;|e|、|δe|都为中等大小时,为提高系统响应速度同时减小超调量,k
p
、kd应大小适中,ki应取较小值。
[0041]
表1 δkp的模糊规则
[0042][0043]
表2 δki的模糊规则
[0044][0045]
表3 δkd的模糊规则
[0046][0047]
进一步地,所述遗传优化算法如图5,按照如下步骤建立:
[0048]
步骤1:设定优化目标函数即适应度函数
[0049][0050]
式中,ω
m1
(t)和ω
m2
(t)分别为电机1和电机2的实际转速,ω
ref
(t)为参考转速。
[0051]
步骤2:种群初始化,采用通过数解法进行遗传算法参数的初始值;
[0052]
步骤3:个体交叉,设定交叉的概率px,种群中每个个体,对应产生一个[0,1]的随机数,若随机数小于交叉概率px,则进行交叉;
[0053]
步骤4:个体变异,设定变异的概率pm,种群中的每个个体,对应产生一个[0,1]的随机数,若随机数小于变异概率pm,则进行变异;
[0054]
步骤5:种群更新,通过交叉变异产生新的种群,然后继续迭代更新产生下一代种群;
[0055]
步骤6:结束,当新种群参数产生的控制效果降低时,即当优化目标函数输出的值大于一个设定阈值时,结束迭代循环。
[0056]
此外,所述滑模速度同步控制器按照如下步骤建立:
[0057]
步骤1:将双电机的动力学方程改写成:
[0058][0059][0060]
步骤2:选取状态量x1、x2,
[0061][0062]
步骤3:取同种型号的电机,有j
m1
=j
m2
=jm、b
m1
=b
m2
=bm,上式被改写成
[0063][0064]
步骤4:令控制律u=dt
em1
/dt-dt
em2
/dt,可以得到系统的状态方程
[0065][0066]
步骤5:基于双电机转速差值选择积分滑模面:
[0067][0068]
其中e(t)=x1;
[0069]
步骤6:为了使系统初始时刻就在滑模面上,取积分初值c为正的常系数;
[0070]
步骤7:选取指数趋近律,
[0071][0072][0073]
步骤8:计算得到两个电机的控制率如下,
[0074]
u=-ks-ε
·
sigmoid(s) (bm/j
m-λ)x2。
[0075]
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。