1.本技术涉及单脚踩踏的平衡车技术领域,特别是涉及一种自平衡载具。
背景技术:
2.平衡车的基本原理是自平衡原理,这一技术可以参考平衡车技术领域比较早的专利us6302230b1,其详细介绍了如何利用自平衡原理来实现骑者踩踏在平衡车上时保持平衡的方案。
3.后来的shane chen于2020年7月2号提交了申请号为16920125、名称为self-balancing foot platform devices的美国发明专利申请,shane chen提出了一种单脚踩踏的个人运输装置,这种个人运输装置也通常被消费者称为独轮平衡车或悬浮车或悬浮鞋,其包括:配置成在使用中支撑骑车人的脚的脚平台;轮构件,其整体垂直地位于所述足部平台的下方;驱动轮部件的马达;位置传感器;以及基于来自位置传感器的数据驱动电机的控制电路;其中,所述轮构件相对于所述足部平台在横向上基本居中;以及其中所述装置被配置为用于无手柄控制。该平衡车有一个明显的缺点是平衡车的通过能力非常差,通过性的问题主要是由平衡车的轮子决定的,一般而言,轮子的直径越小,越难以通过有障碍的地面,例如遇到地面上稍微大一点的石头/台阶等就很难通过,也即通过性差;轮子直径越大,越容易通过有障碍的地面,也即通过性好。
4.对于shane chen申请的该个人运输装置,其轮子直径相对于其脚平台而言是比较小了,因此通过性差,而且其轮子是安装于脚平台下方的,这种安装方式决定了其轮子的直径也不可能很大,因为在这种安装方式下,轮子的直径越大,意味着站在脚平台上的骑者的重心越高,因此会增加骑者被摔倒的风险,另外这种个人运输装置的转弯能力也比较弱,当骑者踩踏在其脚平台上时,是通过人的脚步与脚平台的摩擦力来支持骑者对该平衡车的转弯。
5.因此,有必要对现有技术中涉及的这类单脚踩踏的平衡车做出改进,以至少解决通过性差的缺陷。
技术实现要素:
6.鉴于上述问题,本技术提供了一种自平衡载具,以至少改善单脚踩踏类的电动平衡车的通过性能力较差等问题。
7.根据本技术实施例的一个方面,提供了一种自平衡载具,包括一个供骑者单脚踩踏的脚平台,其具有一基本平坦的顶面;可旋转地连接在所述脚平台的第一侧端的第一轮和可旋转地连接在所述脚平台的第二侧端的第二轮;驱动组件,其被配置为驱动所述第一轮和第二轮;姿态传感器,其被配置为感测所述脚平台的姿态并生成相应的姿态信号;设置于所述脚平台内的电源;以及,与所述驱动组件、姿态传感器以及电源电性连接的控制器,其被配置为基于所述姿态信号而控制所述驱动组件驱动所述第一轮和第二轮;其中,当所述地面自平衡载具在水平地面上处于自平衡状态时,所述顶面距离水平地面的平均高度小
于第一轮和第二轮的直径。
8.本技术实施例提供的这种自平衡载具在脚平台的两个侧端设置了第一轮和第二轮,而且当自平衡载具在水平地面上处于自平衡状态且其顶面与水平地面平行时,该顶面距离水平地面的平均高度被配置为小于第一轮和第二轮的直径,这样一来就创造性地改进了现有技术中的单脚踩踏的平衡车的驱动轮位于脚平台底下的配置所导致的驱动轮的直径相对于脚平台的尺寸不能过大的缺陷,也即,本技术实施例提供的这种单脚踩踏的自平衡载具具备了比现有设计中的单脚踩踏的平衡车的车轮更大的车轮,从而提高了通过性。
9.在一种可选的方式中,所以顶面距离水平地面的平均高度为h,第一轮、第二轮的直径为h,且0.3≤h/h≤0.7,如此,则可以保证骑者在该自平衡载具上的踩踏位置保持一个相对较低的水平,从而可以保证人体的重心也相对较低,从而增加了骑乘过程的稳定性和安全性。
10.在一种可选的方式中,所述第一轮的车轮平面与第二轮的车轮平面相互平行,如此,骑者在直行时,具有较好的稳定性。
11.在一种可选的方式中,所述第一轮的车轮平面与第二轮的车轮平面相互倾斜,如此,骑者在进行转弯时,对所述第一轮和第二轮具有较好的操控性。
12.在一种可选的方式中,所述脚平台横向居中地设于所述第一轮和第二轮之间,如此,保证骑者踩踏所述脚平台在横向上具有较好的稳定性。
13.在一种可选的方式中,所述脚平台纵向居中地设于所述第一轮和第二轮之间,如此,保证骑者踩踏所述脚平台在纵向上具有较好的稳定性。
14.在一种可选的方式中,所述自平衡载具包括助力组件,所述助力组件设置于所述脚平台,所述助力组件包括助力底板,所述助力底板设置于所述脚平台远离地面的一侧,所述助力底板上设置有助力凹槽,如此,所述助力凹槽便于骑者助力,从而实现自平衡载具的转弯。
15.在一种可选的方式中,所述自平衡载具包括挡板,所述挡板设置于所述脚平台,所述挡板位于所述第一轮和所述第二轮之间,如此,所述挡板可起到防护的作用,防止人在骑行过程中腿部与第一轮和第二轮之间发生摩擦造成人体损伤,此外,所述挡板还具有助力作用。
16.在一种可选的方式中,所述第一轮的轮轴线与所述第二轮的轮轴线之间重合,如此,骑者在骑行时具有较好的稳定性。
17.在一种可选的方式中,所述脚平台靠近所述第一轮的边缘到所述第一轮之间的平均距离为d1,所述脚平台靠近所述第二轮的边缘到所述第二轮之间的平均距离为d2,且d1=d2,如此,保证所述自平衡载具具有较好的稳定性,平衡性能较好。
18.在一种可选的方式中,所述脚平台的横向尺寸为d,且0.5≤d1/d≤0.95,0.5≤d2/d≤0.95。
19.在一种可选的方式中,所述第一轮和第二轮的轮轴线位于所述脚平台的上方位置,如此,可以起到降低骑者重心的作用,使得骑者在骑行时更为稳定,不易摔倒。
20.在一种可选的方式中,所述脚平台设置有容置腔;所述驱动组件包括单个电机,所述单个电机设置于所述容置腔内,所述单个电机的输出轴的两端分别连接于所述第一轮和第二轮,且所述单个电机被配置为驱动所述第一轮和第二轮同步转动,如此,仅仅需要一个
电机就可以同时驱动两个轮子,驱动方式非常简单可靠,不需要做差速控制等成本较高和复杂的控制方案。
21.在一种可选的方式中,所述单电机包括减速组件,如此,可以增加电机的输出力矩,间接提高了该自平衡载具的车轮的通过性。
22.在一种可选的方式中,所述驱动组件包括两个电机,一所述电机设置于所述第一轮的轮毂内,另一所述电机设置于所述第二轮的轮毂内,如此,用户可利用所述第一轮和第二轮之间的差速进行转弯。
23.在一种可选的方式中,所述脚平台的纵向尺寸为d,所述脚平台的横向尺寸为d,且d>d。
24.在一种可选的方式中,所述自平衡载具至少满足以下条件之一:
25.所述脚平台的纵向尺寸d满足:15cm≤d≤45cm;所述脚平台的横向尺寸d满足:5cm≤d<20cm。
26.在一种可选的方式中,所述脚平台的平均厚度为所述第一轮或第二轮的轮直径的1/5-2/3,如此,可使得骑者的重心处于较低位置,防止摔倒。
27.在一种可选的方式中,所述自平衡载具至少满足以下条件之一:
28.所述第一轮的轮直径为10cm-50cm;所述第二轮的轮直径为10cm-50cm。
29.在一种可选的方式中,所述第一轮或第二轮的平均厚度小于等于所述脚平台的横向尺寸的1/2,如此,可使得自平衡载具转弯更容易,因为轮的平均厚度越小,自平衡载具转弯时需要克服的地面摩擦力越小。
30.在一种可选的方式中,所述自平衡载具包括限位组件,所述限位组件设置于所述脚平台上,所述限位组件包括限位杆,所述限位杆呈弧形,所述限位杆的一端连接于所述脚平台靠近所述第一轮的一侧,所述限位杆的另一端连接于所述脚平台靠近所述第二轮的一侧,如此,可以避免骑者因不小心滑下脚平台或因动作大从自平衡载具滑走的情况,增加骑行乐趣以及安全性。
31.在一种可选的方式中,所述自平衡载具包括辅助轮,所述辅助轮转动设置于所述脚平台上,且所述辅助轮的轮直径小于所述第一轮或第二轮的轮直径。所述辅助轮可起到辅助支撑的作用,从而提高骑者的平衡性,避免骑者摔倒,同时,可使得骑者更稳定的操控自平衡载具。
附图说明
32.为了更清楚地说明本技术具体实施例或现有技术中的技术方案,下面将对具体实施例或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
33.图1是本技术实施例自平衡载具的一使用状态示意图;
34.图2是本技术实施例自平衡载具的整体结构示意图;
35.图3是本技术自平衡载具的一实施例的整体结构示意图;
36.图4是本技术实施例自平衡载具的整体结构爆炸示意图;
37.图5是本技术实施例自平衡载具的整体结构一角度示意图;
38.图6是本技术实施例自平衡载具的整体结构又一角度示意图;
39.图7是本技术实施例自平衡载具的整体结构一角度另一标注示意图;
40.图8是本技术自平衡载具的一实施例的整体结构一角度示意图;
41.图9是本技术自平衡载具的又一实施例的整体结构一角度示意图;
42.图10是本技术实施例自平衡载具的整体结构又一角度另一标注示意图;
43.图11是本技术自平衡载具的另一实施例的整体结构爆炸示意图。
具体实施方式
44.为了便于理解本技术,下面结合附图和具体实施例,对本技术进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,应该参照说明书附图去具体理解。
45.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本说明书中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本技术。
46.此外,下面所描述的本技术不同实施例中所涉及的技术方案或技术特征只要彼此之间未构成冲突就可以相互结合。
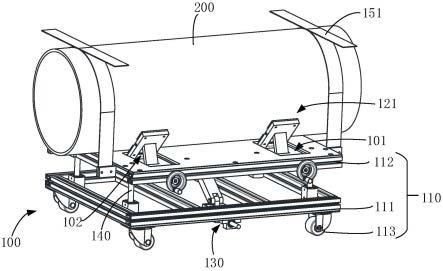
47.本技术实施例中的自平衡载具在实际使用过程中,如图1所示,骑者左右脚一边踩踏一个以达到较好的稳定状态以及使用效果,以下对单个自平衡载具的结构作具体说明。
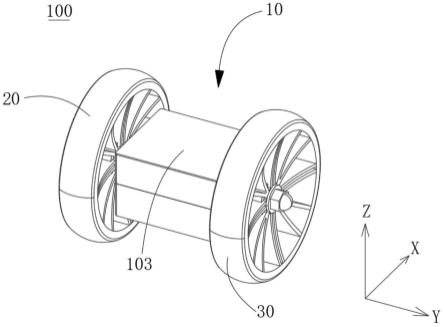
48.请参阅图2,本技术实施例提供一种自平衡载具100,其可以包括脚平台10、第一轮20、第二轮30、驱动组件、姿态传感器、电源以及控制器。其中,该脚平台10可以由骑者单脚踩踏,具体的,骑者可以踩踏在该脚平台的顶面103上。
49.第一轮20可旋转地连接在脚平台10的第一侧端,第二轮30可旋转地连接在脚平台10的第二侧端,驱动组件被配置为驱动第一轮20和第二轮30,姿态传感器被配置为感测脚平台10的姿态并生成相应的姿态信号,电源设置于所述脚平台10内,控制器与驱动组件、姿态传感器以及电源电连接,控制器被配置为基于姿态信号而控制驱动组件驱动第一轮20和第二轮30。
50.如图3所示,自平衡载具100还可以包括助力组件40、挡板50、限位组件60以及辅助轮70。助力组件40设置于脚平台10,助力组件40便于骑者助力进行转弯,挡板50设置于脚平台10上,挡板50位于第一轮20和第二轮30之间,限位组件60设置于脚平台10上,辅助轮70转动设置于脚平台10上,辅助轮70的轮直径小于第一轮20或第二轮30的轮直径。以下对脚平台10、第一轮20、第二轮30、驱动组件、姿态传感器、电源、控制器、助力组件40、挡板50、限位组件60以及辅助轮70作具体说明。
51.为了更好的对自平衡载具的结构进行说明,将结合x、y、z坐标轴对自平衡载具的结构进行叙述,其中,x、y、z坐标轴两两垂直,其中,所述脚平台10的纵向为x轴方向,所述脚平台10的横向为y轴方向,所述脚平台10的厚度方向为z轴方向。
52.对于上述脚平台10,如图2和图4所示,脚平台10供骑者踩踏,且适用于单脚踩踏,骑者单脚踩踏时可向前或向后倾斜。脚平台10设置有容置腔(图未示),容置腔可用于放置
驱动组件、电源等部件。脚平台10包括第一壳体101和第二壳体102,第一壳体101和第二壳体102连接,第一壳体101设置有第一腔体(图未示),第二壳体102设置有第二腔体(图未示),第一壳体101和第二壳体102连接时,第一腔体和第二腔体连通形成上述脚平台10的容置腔。此外,如图5所示,当自平衡载具在水平地面上处于自平衡状态时,脚平台10上的顶面103距离水平地面的平均高度h小于第一轮20和第二轮30的直径h,由于,第一轮20和第二轮30的直径更大,相较于现有技术中将轮子设置于脚平台下,此时,若将轮子直径设置得很大,由此造成骑者重心偏高,骑者易摔倒等问题,而本技术中的第一轮20和第二轮30位于脚平台10的两侧,此时,增大第一轮20和第二轮30的直径,不仅对骑者的重心无显著影响,且在地面出现石块或台阶时,自平衡载具具有更好的通过性。
53.需要说明的是,一自平衡载具100在水平地面上处于自平衡状态时至少是指其可以让骑者单脚踩踏着且使得骑者处于稳定平衡而不会倾倒的状态,此时,该自平衡载具100可能载着骑者发生移动,也可能载着骑者静止在原地。
54.在其他示例中,一自平衡载具100在水平地面上处于自平衡状态时也可以是指自平衡载具100在无骑者骑行时,将其放置在水平地面上达到自平衡状态,非常常见的一种情况是,自平衡载具100一般都具备开机自平衡的功能,即打开自平衡载具100的开关时,自平衡载具100在没有骑者踩踏的情况下,其也可以达到平衡而不倾倒的状态。
55.进一步的,当自平衡载具100在水平地面上处于前述自平衡状态时,脚平台10的顶面103与水平地面之间可能是处于平行状态,也可能是处于成夹角状态(例如顶面103与水平面有正负30度范围内的夹角),这两种不同状态可以由不同的自平衡算法设置,例如根据不同的出厂设置,自平衡状态时的脚平台与水平地面可以设置成具有一定的夹角,此处不作具体限定。
56.进一步的,此时顶面103距离水平地面的平均高度小于所述第一轮和第二轮的直径,这里具体是指:由前述可知,在此时的自平衡状态下,顶面103跟水平面本身既可能平行,也可能产生夹角,因此,基本平坦的顶面103到水平地面的平均高度至少包括两个方面的含义:
57.第一方面,在自平衡状态下,当顶面103与水平面平行时,顶面103到水平地面的平均高度就是顶面103与水平地面这两个平面之间的距离。
58.第二方面,在自平衡状态下,当顶面103与水平地面不平行时,顶面103到水平地面的平均高度可以是由顶面103上的按一定规律划取的各个区域/局部/点到水平地面的距离的平均值,最简单的,例如此时可以取一个顶面103到水平地面的最大高度和一个顶面103到水平地面的最小高度,然后取二者的平均值来作为此时的顶面103到水平地面的平均高度。
59.值得说明的是,出于消费者惯常使用的习惯,出厂设置时,脚平台10的顶面103在自平衡载具100处于自平衡状态时,一般都会设置成与水平地面平行,因为这样带来骑乘体验感最好,消费者/骑者骑乘时踩在顶面103上就相当于踩在水平地面上。在一些实施例中,如图6所示,所述脚平台10的纵向尺寸为d,脚平台10的横向尺寸为d,且d>d。可选的,脚平台10的纵向尺寸d满足:15cm≤d≤45cm,脚平台10的横向尺寸d满足:5cm≤d<20cm,这样的尺寸设计是从人体工学的角度的来设计的,为的是合理且适度的给骑者提供一个踩踏平台。
60.在一些实施例中,脚平台10的厚度为第一轮20或第二轮30的轮直径的1/5-2/3,这样设置,可使得骑者的重心处于较低位置,防止摔倒。
61.需要说明的是:由于脚平台10的形状可为不规则的形状,因此,上述脚平台10的纵向尺寸、横向尺寸以及厚度尺寸均可为平均尺寸,用户可根据实际情况进行选择。
62.在一些实施例中,如图7所示,在自平衡状态下,且顶面103与水平地面平行时,顶面103到水平地面的平均高度h,就是顶面103与水平地面这两个平面之间的距离为h,所述第一轮20、第二轮30的直径为h,且0.3≤h/h≤0.7,这样设置,第一轮20和第二轮30的直径更大,在地面出现石块或台阶时,第一轮20和第二轮30具有更好的通过性。
63.在一些实施例中,为保证骑者踩踏所述脚平台10在横向上具有较好的稳定性,脚平台10横向居中设于所述第一轮20和第二轮30之间。
64.在一些实施例中,为保证骑者踩踏所述脚平台10在纵向上具有较好的稳定性,脚平台10纵向居中设于所述第一轮20和第二轮30之间。
65.在一些实施例中,脚平台10靠近所述第一轮20的边缘到第一轮20之间的距离为d1,脚平台10靠近所述第二轮30的边缘到第二轮30之间的距离为d2,且d1=d2,这样可保证自平衡载具具有较好的稳定性,平衡性能较好。可选的,脚平台10的横向尺寸d与d1、d2满足以下关系:0.5≤d1/d≤0.95,0.5≤d2/d≤0.95。
66.需要说明的是:由于脚平台10可能是规则或不规则的形状,其中,脚平台10靠近所述第一轮20的“边缘”指的是脚平台10靠近第一轮20的最接近的点或面,距离d1则为脚平台10和第一轮20上相互最接近的两个点或面之间的距离,同样的,脚平台10靠近所述第二轮30的“边缘”指的是脚平台10靠近所述第二轮30的最接近的点或面,距离d2则为脚平台10和第二轮30上相互最接近的两个点或面之间的距离。
67.对于上述第一轮20和第二轮30,如图2所示,第一轮20可旋转地连接在脚平台10的第一侧端,第二轮30可旋转地连接在所述脚平台10的第二侧端。第一轮20和第二轮30在地面上转动,从而带动骑者达到预设位置,且第一轮20和第二轮30之间转速可相同或不同,此处不作具体限定,例如:当第一轮20和第二轮30之间的转速相同时,第一轮20和第二轮30带动骑者朝前方或后方移动,直行更为稳定,当第一轮20和第二轮30之间的转速不同时,利用第一轮20和第二轮30之间的差速,骑者在转弯时更为便利。可选的,第一轮20的轮直径为10cm-50cm,第二轮30的轮直径为10cm-50cm。
68.在一些实施例中,第一轮20的车轮平面与第二轮30的车轮平面相互平行。可以理解的是,第一轮20的车轮平面和所述第二轮30的车轮平面之间不限于相互平行设置,也可为相互倾斜设置,例如:如图8和图9所示,第一轮20的车轮平面和第二轮30的车轮平面之间呈正“八”或倒“八”设置,这样设置,骑者在进行转弯时,对第一轮20和第二轮30具有较好的操控性。
69.需要说明的是:车轮平面是这样一个平面,其垂直于车轮的旋转轴线并且穿过轮胎或装配在车轮上的弹性罩体的与地面的接触区域的中心。
70.在一些实施例中,第一轮20的轮轴线与第二轮30的轮轴线之间重合,此时,骑者在骑行时具有较好的稳定性。
71.在一些实施例中,第一轮20和第二轮30的轮轴线位于所述脚平台10的上方位置,这样设置,可以起到降低骑者重心的作用,使得骑者在骑行时更为稳定,不易摔倒。
72.在一些实施例中,如图10所示,第一轮20或第二轮30的平均厚度d3小于等于脚平台10的横向尺寸d的1/2,这样设置,可使得自平衡载具转弯更容易,因为轮的平均厚度越小,自平衡载具100转弯时需要克服的地面摩擦力越小。
73.对于上述驱动组件,驱动组件被配置为驱动所述第一轮20和第二轮30。在一些实施例中,驱动组件可以是单个电机,单个电机设置于所述容置腔内,单个电机的输出轴的两端可以分别连接于所述第一轮20和第二轮30,这样单个电机便可以同时驱动第一轮和第二轮发生转动,此时第一轮和第二轮的转动是同步的,这样的驱动方式非常简单可靠,不需要做差速控制等成本较高和复杂的驱动控制方案。
74.可以理解的是:驱动组件包括但不限于上述单个电机,只要满足驱动所述第一轮20和第二轮30进行相应的动作,可以实现具体的驱动功能即可。
75.在一些实施例中,上述单个电机还可以包括减速组件,减速组件例如可以包括行星减速器,减速组件可用于提高驱动组件的输出扭矩,从而提高自平衡载具通过障碍物的能力。
76.在一些实施例中,驱动组件还可以是由两个电机组成,一所述电机设置于第一轮20的轮毂内,另一电机设置于所述第二轮30的轮毂内。相较于上述单个电机同时控制所述第一轮20和第二轮30的转速,两个电机可分别控制第一轮20和第二轮30的转速,用户可利用所述第一轮20和第二轮30之间的差速进行转弯,例如:第一轮20的转速较第二轮30的转速快时,自平衡载具可朝偏向第二轮30的方向转弯,第一轮20的转速较第二轮30的转速慢时,自平衡载具可朝偏向第一轮20的方向转弯。
77.对于上述挡板50,如图3所示,挡板50设置于所述脚平台10,挡板50位于第一轮20和第二轮30之间。可选的,挡板50的数量为两个,一挡板50位于第一轮20和所述脚平台10之间,另一挡板50位于第二轮30和脚平台10之间。可选的,挡板50固定于脚平台10的两端。挡板50可起到防护的作用,防止人在骑行自平衡载具过程中腿部与第一轮20和第二轮30之间发生摩擦造成人体损伤。
78.此外挡板50还具有助力作用,例如:骑者想向左转弯时,只需要骑者的腿部向左抵靠靠近左侧的挡板50,这样右轮比起左轮将会承担来自人体更少的体重压力,此时,靠近左侧的挡板50可以相当于一个支点,人的腿部相当于一个杠杆,从而方向的将右轮基本翘到处于一个悬空的状态,当然这种悬空是微乎其微的,或者说肉眼看过去右轮仍然是贴地的状态,但是可以明确的是,右轮受到的压力明显小于左轮,一旦右轮处于上述悬空状态,则此时自平衡载具上跟地面接触的部分只有左轮了,而且是左轮与地面接触呈一条线的部分,尽管左轮受到的人体压力变大了,但这时,对于自平衡载具整体来说,其与地面的接触面积显著减小了,而增加的人体压力又不是很大,因此,对于整个自平衡载具来说,骑者想左转时,地面施加给自平衡载具的摩擦力将会小很多,进而容易转弯。
79.对于上述助力组件40,如图3所示,助力组件40设置于脚平台10,助力组件40包括助力底板401,助力底板401设置于脚平台10远离地面的一侧,助力底板401上设置有助力凹槽40a。助力凹槽40a便于骑者助力,从而实现自平衡载具100的转弯,较为便利,助力凹槽40a的助力原理与上述挡板50的助力原理类似,此处不再赘述。
80.对于上述限位组件60,如图3所示,限位组件60设置于脚平台10上,限位组件60用于对人体的脚部进行限位,可以避免骑者因不小心滑下脚平台10或因动作大从自平衡载具
滑走的情况,增加骑行乐趣以及安全性。限位组件60包括限位杆(未图示),限位杆呈弧形,限位杆的一端连接于脚平台10靠近所述第一轮20的一侧,限位杆的另一端连接于脚平台10靠近第二轮30的一侧。可以理解的是:限位组件60的结构不限于上述,也可以为其他结构,例如:限位组件60包括两限位绳,一限位绳设置于脚平台10靠近第一轮20的一侧,另一限位绳设置于脚平台10靠近第二轮30的一侧,两限位绳之间可用于对人脚部进行部分绑定从而达到限位的目的。
81.对于上述辅助轮70,如图3和图11所示,辅助轮70转动设置于脚平台10上,且辅助轮70的轮直径小于第一轮20或第二轮30的轮直径。辅助轮70可起到辅助支撑的作用,从而提高骑者的平衡性,避免骑者摔倒,同时,可使得骑者更稳定的操控自平衡载具。
82.对于上述姿态传感器、电源以及控制器,控制器与驱动组件、姿态传感器以及电源电连接,其中,电源为自平衡载具提供电动力,姿态传感器被配置为感测脚平台10的姿态并生成相应的姿态信号,姿态信号包括俯仰感应数据,控制器根据上述俯仰感应数据确定所述脚平台10的当前俯仰角,并通过控制驱动组件驱动第一轮20和第二轮30。可选的,姿态传感器可为陀螺仪。可以理解的是:姿态传感器不限于陀螺仪,只要满足可以感测骑者在脚平台10上的姿态并生成相应的姿态信号即可。
83.在本技术实施例中,通过设置有一个供骑者单脚踩踏的脚平台10、第一轮20、第二轮30、驱动组件、姿态传感器、电源以及控制器。其中,第一轮20可旋转地连接在所述脚平台10的第一侧端,第二轮30可旋转地连接在脚平台10的第二侧端,驱动组件被配置为驱动第一轮20和第二轮30,姿态传感器被配置为感测脚平台10的姿态并生成相应的姿态信号,电源设置于所述脚平台10内,控制器与所述驱动组件、姿态传感器以及电源电连接,控制器被配置为基于姿态信号而控制驱动组件驱动第一轮20和第二轮30。此外,当自平衡载具在水平地面上处于自平衡状态时,骑者在脚平台10上的踩踏位置距离水平地面的高度小于第一轮20和第二轮30的直径,这样设置,不仅可起到降低骑者重心的作用,防止骑者摔倒,同时,第一轮20和第二轮30的直径相比于脚踏位置距离水平地面的高度较大时,由于,第一轮20和第二轮30的直径更大,在地面出现石块或台阶等地面障碍时,第一轮20和第二轮30具有更好的通过性。
84.以上所述仅为本技术的实施例,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。