1.本技术涉及饲料加工设备领域,具体涉及一种新型的袋状饲料上料机构。
背景技术:
2.现在的饲料加工完毕后,加工完毕的饲料装袋后进行堆码,多袋袋状饲料堆码在堆码架上,当需要车辆转运走的时候,需要将堆码在堆码架上的饲料,同时人工的方式将饲料搬运到输送组件上,通过输送组件将堆码完毕的袋状饲料输送到转运车上,这样工作人员的劳动强度比较大,同时在进行堆码的时候,车辆上堆码的高度越高,这样需要车辆上的工作人员需要进行搬运堆码,这样工作人员的劳动强度比较大,同时堆码上料的效率比较的低。
技术实现要素:
3.针对上述现有技术的不足,本实用新型提出了一种新型的袋状饲料上料机构,便于自动将堆码好的袋状饲料堆码在转运车上,这样降低工作人员的劳动强度,同时转运效率与堆码效率比较的高。
4.为实现上述的目的,本实用新型的方案:一种新型的袋状饲料上料机构,包括支撑架、输送机构、夹取机构与升降机构,支撑架为龙门架且龙门架的两端设置有地面,在地面上设置有输送机构且输送机构位于龙门架的下方,输送机构靠近龙门架的一端,在支撑架上设置有滑动组件,在滑动组件上设置有在滑动组件上进行滑动的夹取机构,在龙门架与滑动组件之间设置有升降机构,通过升降机构实现夹取机构的升降。
5.优选地,夹取机构包括挡板、耙齿、拉紧带与伸缩组件,其中挡板竖向设置,在挡板的底部设置有多根并排设置有耙齿,在挡板的顶部固定有和耙齿平行的承压杆,在承压杆远离挡板的一端设置有拉紧带,在拉紧带的底部设置有伸缩组件,在耙齿远离挡板一端的底部开设有与伸缩组件向对应的限位槽,当伸缩组件向外顶出的时候,伸缩组件卡设在限位槽内。
6.优选地,输送机构包括输送带,在输送带的顶部设置有多根并排设置的枕木,枕木之间设置有间隙,耙齿可以穿过枕木之间的间隙,输送机构上可以防止柱堆码完毕的袋状饲料。
7.优选地,滑动组件包括滑动轨道、滑动座与驱动组件,滑动座卡设在滑动轨道上且滑动座在滑动轨道进行滑动,在滑动座与滑动轨道之间设置有驱动组件,驱动组件包括齿条、齿轮与电机,齿条设置在滑动轨道上,在滑动座上设置有电机,在电机的输出轴上设置有与齿条相互啮合的齿轮,在龙门架上设置有气缸,在气缸的活塞杆上固定有红外线发射组件,在滑动座上设置有红外线接收组件且红外线接收组件与电机进行连接,红外线发射组件与红外线接收组件上下相对。
8.优选地,升降机构即为多个液压缸,多个液压缸缸体通过螺栓紧固的方式固定在龙门架的顶部,液压缸的活塞杆通过螺栓紧固的方式固定在滑动轨道上。
9.与现有技术相比,本实用新型的优点在于:便于自动将堆码好的袋状饲料堆码在转运车上,这样降低工作人员的劳动强度,同时转运效率与堆码效率比较的高。
附图说明
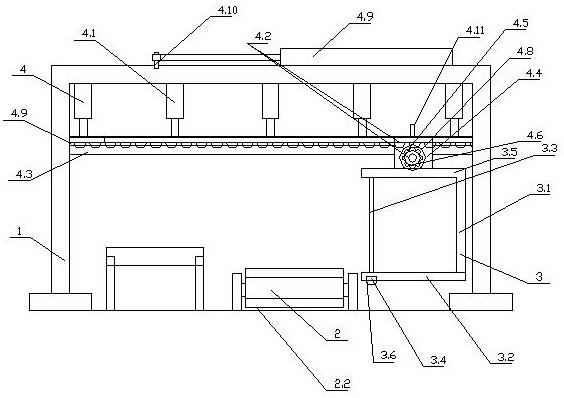
10.图1为本实用新型的主视图。
11.图2为本实用新型的俯视图。
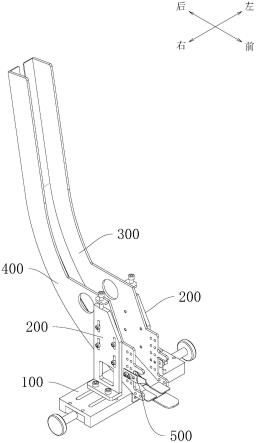
12.图3为本实用新型夹取机构的示意图。
13.其中,1、支撑架,2、输送机构,2.1、输送带,2.2、枕木,3、夹取机构,3.1、挡板,3.2、耙齿,3.3、拉紧带,3.4、伸缩组件,3.5、承压杆,3.6、限位槽,4、升降机构,4.1、液压缸,4.2、滑动组件,4.3、滑动轨道,4.4、滑动座,4.5、驱动组件,4.6、齿条,4.7、齿轮,4.8、电机,4.9、气缸,4.10、红外线发射组件,4.11、红外线接收组件。
具体实施方式
14.现结合附图,对本实用新型进一步的阐述。
15.如图1-3所示,一种新型的袋状饲料上料机构,包括支撑架1、输送机构2、夹取机构3与升降机构4,支撑架1为龙门架且龙门架的左右两端通过螺栓固定有地面,在地面上通过轴承及轴承座设置有输送机构2且输送机构2位于龙门架的下方(输送机构2即常规的输送带2.1且输送带2.1搭设在多根并排设置的辊筒上,每根辊筒通过轴承固定在放置在地面上的机架上,通过电机4.8驱动辊筒转动实现输送带2.1的移动,堆码好的袋状饲料放置在输送带2.1上进行输送),输送机构2靠近龙门架的右端,在支撑架1上通过螺栓紧固的方式固定滑动组件4.2,滑动组件4.2实现左右移动,在滑动组件4.2上通过螺栓固定的方式固定有在滑动组件4.2上进行滑动的夹取机构3,通过夹取机构3实现对堆码完成的袋状饲料进行夹取输送到车辆上,在龙门架与滑动组件4.2之间通过螺栓紧固的方式固定有升降机构4,通过升降机构4实现带夹取组件的升降,这样便于对堆码完毕的袋状饲料进行高度调节,使袋状饲料的底部与车辆平齐,这样通过夹取机构3实现将堆码完毕的饲料放置到车辆上,通过升降机构4实现夹取机构3的升降。
16.夹取机构3包括挡板3.1、耙齿3.2、拉紧带3.3与伸缩组件3.4,其中挡板3.1竖向设置,在挡板3.1的底部通过焊接的方式固定有多根并排设置有耙齿3.2且耙齿3.2向左延伸,在挡板3.1的顶部通过螺栓紧固的方式固定有多根和耙齿3.2平行的承压杆3.5,在承压杆3.5远离挡板3.1的一端(左端)通过螺栓紧固的方式固定有拉紧带3.3,在拉紧带3.3的底部通过螺栓紧固的方式固定有伸缩组件3.4(伸缩组件3.4接双向气缸4.9,在双向气缸4.9的活塞杆上通过焊接的方式固定有限位杆),在耙齿3.2远离挡板3.1一端的底部开设有与伸缩组件3.4向对应的限位槽3.6(当双向气向外延伸的时候,限位杆伸入到限位槽3.6内,这样耙齿3.2、挡板3.1、拉紧带3.3与承压杆3.5形成一个包裹袋状饲料的矩形框架),当伸缩组件3.4向外顶出的时候,伸缩组件3.4卡设在限位槽3.6内,当需要卸料的时候,伸缩组件3.4回缩实现限位杆退出限位槽3.6,拉紧带3.3失去限位,这样挡板3.1可以向左移动与袋状饲料脱离开来。
17.输送机构2包括输送带2.1,在输送带2.1的顶部通过铆接的方式固定有多根并排设置的枕木2.2(枕木2.2横向设置),枕木2.2之间设置有间隙,耙齿3.2可以穿过枕木2.2之
间的间隙且耙齿3.2位于袋状饲料的底部,输送机构2上可以放置多组堆码完毕的袋状饲料,输送机构2将袋状饲料输送到夹取机构3的下方进行夹取。
18.滑动组件4.2包括滑动轨道4.3、滑动座4.4与驱动组件4.5,滑动座4.4卡设在滑动轨道4.3上且滑动座4.4在滑动轨道4.3进行滑动,在滑动座4.4与滑动轨道4.3之间设置有驱动组件4.5,驱动组件4.5包括齿条4.6、齿轮4.7与电机4.8,齿条4.6通过焊接的方式固定在滑动轨道4.3前侧,在滑动座4.4上通过螺栓紧固的方式固定有电机4.8,在电机4.8的输出轴上通过焊接的方式固定有与齿条4.6相互啮合的齿轮4.7,在龙门架上通过螺栓紧固的方式固定有气缸4.9,在气缸4.9的活塞杆上通过螺栓紧固的方式固定有红外线发射组件4.10,在滑动座4.4上设置有红外线接收组件4.11且红外线接收组件4.11与电机4.8进行连接,红外线发射组件4.10与红外线接收组件4.11上下相对(外线发射组件与红外线接收组件4.11即为itr8307/s17/tr8的发射件与接收件),通过气缸4.9的伸缩调节红外线发射组件4.10的位置,这样实现调节将夹取机构3输送位置进行控制,这样便于进行堆码,根据车辆的位置不同,调节红外线发射组件4.10的位置,当红外线接收组件4.11接收到红外线发射组件4.10的红外线的时候,电机4.8停止工作,夹取组件上的伸缩组件3.4回缩,夹取机构3向右移动完成夹取机构3与袋状饲料的分离。
19.升降机构4即为多个液压缸4.1,多个液压缸4.1缸体通过螺栓紧固的方式固定在龙门架的顶部,液压缸4.1的活塞杆通过螺栓紧固的方式固定在滑动轨道4.3上,通过升降机构4实现夹取机构3的升降,实现袋状饲料的高度调节,同时能抬高袋状饲料与输送带2.1进行分离,同时也能实现夹取机构3下降实现耙齿3.2底部与袋状饲料的基座分离开来。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。