:
1.本发明属于种植体加工技术领域,特别涉及一种种植体表面腐蚀清洗系统及其清洗方法。
背景技术:
2.金属种植体是种植体中的一大类型,为便于种植体与人体口腔内组织整合,通常需要对金属种植体进行表面处理,现有的表面处理技术还存在自动化程度低、处理不彻底、表面易残余杂质等缺陷。
3.公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现要素:
4.本发明的目的在于提供一种种植体表面腐蚀清洗系统及其清洗方法,从而克服上述现有技术中的缺陷。
5.为实现上述目的,本发明提供了一种种植体表面腐蚀清洗系统,包括操作台、控制器、机台、超声槽一、腐蚀槽一、腐蚀槽二、喷淋槽、超声槽二、超声槽三和排风装置;所述操作台设置在机台外侧,所述控制器设置在操作台上,所述超声槽一、腐蚀槽一、腐蚀槽二、喷淋槽、超声槽二、超声槽三依次设置在机台上,所述排风装置包括排风总管和与排风总管连接的若干排风分管,所述每个排风分管端部均设置有排风罩,所述各排风分管分别位于超声槽一、腐蚀槽一、腐蚀槽二、喷淋槽、超声槽二、超声槽三上方,所述排风总管位于机台外侧。
6.作为优选,所述超声槽一、腐蚀槽一、腐蚀槽二、喷淋槽、超声槽二、超声槽三下方均设置有加热装置。
7.作为优选,还包括机械手装置,所述机械手装置包括机械手机架、纵向轨道、横向轨道和夹具,机械手机架位于机台外侧,所述纵向轨道设置在机械手机架上,所述横向轨道通过滑块与纵向轨道连接,所述夹具设置在横向轨道上,且可在横向轨道上横向移动。
8.一种种植体表面腐蚀清洗方法,包括以下步骤:
9.(1)通过机械手将种植体放入到超声槽一中,往超声槽一中加入清水和20%浓度的盐酸溶液,超声振动清洗掉种植体表面的油污杂质;
10.(2)机械手将种植体从超声槽一中取出,并将种植体放入到腐蚀槽一中,往腐蚀槽一中加入硫酸,种植体在腐蚀槽一中浸泡30-40分钟;
11.(3)机械手将种植体从腐蚀槽一中取出,并将种植体放入到腐蚀槽二中,往腐蚀槽二中加入硫酸,种植体在腐蚀槽二中继续浸泡30-40分钟;
12.(4)机械手将种植体从腐蚀槽二中取出,并将种植体放入到喷淋槽中,往喷淋槽中加入清水,冲洗掉种植体表面残留的酸液;
13.(5)机械手将种植体从喷淋槽中取出,并将种植体放入到超声槽二中,往超声槽二
中加入清水,超声振动清洗掉种植体表面残留的杂质;
14.(6)机械手将种植体从超声槽二中取出,并将种植体放入到超声槽三中,往超声槽三中加入清水,继续超声振动清洗掉种植体表面残留的杂质;
15.(7)检测超声槽三中水的电导率,验证种植体是否已清洗干净。
16.作为优选,所述步骤(1)-(6)均在45-90℃条件下进行。
17.与现有技术相比,本发明的一个方面具有如下有益效果:
18.本发明可实现种植体表面自动化清洗,其中采用多道超声槽、腐蚀槽设计,并结合检测程序,可提高表面处理及清洗的效果,保证种植体处理的质量。
附图说明:
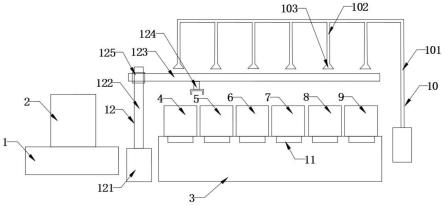
19.图1为本发明的一种种植体表面腐蚀清洗系统的示意图;
20.附图标记为:1-操作台、2-控制器、3-机台、4-超声槽一、5-腐蚀槽一、6-腐蚀槽二、7-喷淋槽、8-超声槽二、9-超声槽三、10-排风装置、101-排风总管、102-排风分管、103-排风罩、11-加热装置、12-机械手装置、121-机械手机架、122-纵向轨道、123-横向轨道、124-夹具、125-滑块。
具体实施方式:
21.下面对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
22.除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
23.如图1所示,一种种植体表面腐蚀清洗系统,包括操作台1、控制器2、机台3、超声槽一4、腐蚀槽一5、腐蚀槽二6、喷淋槽7、超声槽二8、超声槽三9和排风装置10;所述操作台1设置在机台3外侧,所述控制器2设置在操作台1上,所述超声槽一4、腐蚀槽一5、腐蚀槽二6、喷淋槽7、超声槽二8、超声槽三9依次设置在机台3上,所述排风装置10包括排风总管101和与排风总管101连接的若干排风分管102,所述每个排风分管102端部均设置有排风罩103,所述各排风分管102分别位于超声槽一4、腐蚀槽一5、腐蚀槽二6、喷淋槽7、超声槽二8、超声槽三9上方,所述排风总管101位于机台3外侧。
24.作为优选,所述超声槽一4、腐蚀槽一5、腐蚀槽二6、喷淋槽7、超声槽二8、超声槽三9下方均设置有加热装置11。
25.作为优选,还包括机械手装置12,所述机械手装置12包括机械手机架121、纵向轨道122、横向轨道123和夹具124,机械手机架121位于机台3外侧,所述纵向轨道122设置在机械手机架121上,所述横向轨道123通过滑块125与纵向轨道122连接,所述夹具124设置在横向轨道123上,且可在横向轨道123上横向移动。
26.一种种植体表面腐蚀清洗方法,包括以下步骤:
27.(1)通过机械手将种植体放入到超声槽一中,往超声槽一中加入清水和20%浓度的盐酸溶液,超声振动清洗掉种植体表面的油污杂质;
28.(2)机械手将种植体从超声槽一中取出,并将种植体放入到腐蚀槽一中,往腐蚀槽
一中加入硫酸,种植体在腐蚀槽一中浸泡30-40分钟;
29.(3)机械手将种植体从腐蚀槽一中取出,并将种植体放入到腐蚀槽二中,往腐蚀槽二中加入硫酸,种植体在腐蚀槽二中继续浸泡30-40分钟;
30.(4)机械手将种植体从腐蚀槽二中取出,并将种植体放入到喷淋槽中,往喷淋槽中加入清水,冲洗掉种植体表面残留的酸液;
31.(5)机械手将种植体从喷淋槽中取出,并将种植体放入到超声槽二中,往超声槽二中加入清水,超声振动清洗掉种植体表面残留的杂质;
32.(6)机械手将种植体从超声槽二中取出,并将种植体放入到超声槽三中,往超声槽三中加入清水,继续超声振动清洗掉种植体表面残留的杂质;
33.(7)检测超声槽三中水的电导率,验证种植体是否已清洗干净。
34.作为优选,所述步骤(1)-(6)均在45-90℃条件下进行。在该温度下能够加快腐蚀,且清洗也能够更彻底。
35.实施时,机械手装置12用于夹取种植体,夹取时,调整滑块125将横向轨道123调整到合适高度,夹具124在横向轨道123上横向移动,移动到对应的槽时,夹具124放下将种植体夹起后移动到下一个槽的位置处将种植体放下,其中在超声处理、腐蚀等过程过排风分管102从各个槽的上方进行抽风排放,保持环境清洁;以上各操作程序均可通过控制器2实现控制。其中在清洗程序中加入对超声槽三中水的电导率的测试,可根据导电率的值,判断水质是否洁净,从而判断种植体是否清洗干净。
36.本发明可实现种植体处理、清洗的自动化操作,其中多道腐蚀槽的设计可提高表面腐蚀处理的效果,多道超声槽及喷淋槽的设计并结合电导率的检测,可提高种植体表面清洗的效果,腐蚀、清洗均在45-90℃条件下进行,可加快腐蚀处理及清洗的速度。
37.前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
