1.本发明涉及巡检机器人技术领域,具体涉及一种巡检机器人行走防撞设备。
背景技术:
2.随着经济的快速发展,电力系统规模的不断扩大,对电力系统运行的稳定性要求也越来越高,通过巡检机器人对电力系统进行巡视工作,保证电力系统正常稳定地运行,同时实现无纸化和信息化,相比人工巡视提高巡视的工作效率和质量。但传统的电力巡检机器人其外壳较为脆弱,当自身在行走过程中与外物发生撞击时无法对本体进行保护,容易造成机器人损坏。
3.现有的一种巡检机器人行走防撞设备在机器人发生碰撞时,缓冲垫首先接触到碰撞物进行缓冲,而产生的阻力使防护壳带动连接杆向内移动并通过弹簧形变实现抗震缓冲,同时阻尼器降低碰撞时产生的震动,从而稳定机器人,避免机器人受到损伤。
4.但上述巡检机器人行走防撞设备在使用时,由于是在机器人行走的前后分别安装有连接杆,连接杆的前端安装有缓冲垫,只有当机器人正面发生碰撞时防撞设备才能起作用,但机器人在行走过程中可能并不是正向与物体发生碰撞,当机器人在行走过程中正斜方发生碰撞时,上述防撞设备起到防撞效果较差。
技术实现要素:
5.本发明的目的在于提供一种巡检机器人行走防撞设备,解决了现有的巡检机器人行走防撞设备在使用时,由于是在机器人行走的前后分别安装有连接杆,连接杆的前端安装有缓冲垫,只有当机器人正面发生碰撞时防撞设备才能起作用,但机器人在行走过程中可能并不是正向与物体发生碰撞,当机器人在行走过程中正斜方发生碰撞时,上述防撞设备起到防撞效果较差的问题。
6.为实现上述目的,本发明提供了一种巡检机器人行走防撞设备,包括外壳和监控组件,所述监控组件安装在所述外壳的上方,
7.还包括防撞组件,
8.所述外壳具有安装槽,所述安装槽位于所述外壳的外侧,所述防撞组件包括导向杆、安装块、连接构件和防撞板,所述导向杆与所述外壳固定连接,并位于所述安装槽中,所述安装块与所述导向杆滑动连接,所述防撞板通过所述连接构件安装在所述安装块上。
9.其中,所述监控组件包括底座和监控器,所述底座安装在所述外壳的上方;所述监控器安装在所述底座的上方。
10.其中,所述防撞组件还包括弹簧,所述弹簧套设在所述导向杆的外侧,并位于所述安装块和所述外壳之间。
11.其中,所述防撞组件还包括隔板和阻尼器,所述隔板与所述导向杆固定连接,并与所述外壳固定连接;所述阻尼器安装在所述隔板和所述安装块之间。
12.其中,所述连接构件包括连接座、转轴和连接杆,所述连接座与所述安装块固定连
接;所述连接杆通过所述转轴安装在所述连接座上。
13.其中,所述巡检机器人行走防撞设备还包括缓冲组件,所述缓冲组件包括安装轴和转轮,所述安装轴与所述防撞板固定连接,并位于所述防撞板的上方;所述转轮与所述安装轴转动连接,并位于所述安装轴的顶部。
14.其中,所述缓冲组件还包括橡胶圈,所述橡胶圈与所述转轮固定连接,并套设在所述转轮的外侧。
15.本发明的一种巡检机器人行走防撞设备,在使用时,当巡检机器人在行走过程中与物体发生碰撞时首先与所述防撞板接触,通过弧形的所述防撞板能更全面地对巡检机器人移动的前后方进行包围保护,同时通过所述防撞板发生形变对产生的碰撞力进行吸收,从而对巡检机器人进行防撞保护,提高了对巡检机器人起到的防撞能力;其次当碰撞发生,所述防撞板产生形变时,通过所述连接构件推动所述安装块在所述导向杆上移动,所述安装杆与所述导向杆之间发生相对移动,由于所述安装块与所述导向杆之间的摩擦系数较大,使得所述安装块在所述导向杆上平缓的运动,可以极大降低碰撞产生的震动,从而稳定巡检机器人,避免其受到损伤。
附图说明
16.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
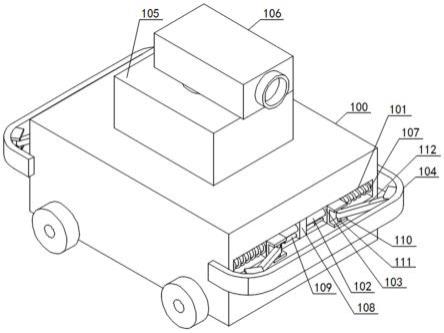
17.图1是本发明第一实施例的巡检机器人行走防撞设备整体的结构示意图。
18.图2是本发明第一实施例的巡检机器人行走防撞设备的正视图。
19.图3是本发明第二实施例的巡检机器人行走防撞设备整体的结构示意图。
20.图4是本发明第二实施例的巡检机器人行走防撞设备的正视图。
21.图中:100-外壳、101-安装槽、102-导向杆、103-安装块、104-防撞板、105-底座、106-监控器、107-弹簧、108-隔板、109-阻尼器、110-连接座、111-转轴、112-连接杆、213-安装轴、214-转轮、215-橡胶圈。
具体实施方式
22.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
23.第一实施例:
24.请参阅图1和图2,图1是本发明第一实施例的巡检机器人行走防撞设备整体的结构示意图,图2是本发明第一实施例的巡检机器人行走防撞设备的正视图。本发明提供一种巡检机器人行走防撞设备:包括外壳100、监控组件和防撞组件,所述监控组件包括底座105和监控器106,所述外壳100具有安装槽101,所述防撞组件包括导向杆102、安装块103、连接构件、防撞板104、弹簧107、隔板108和阻尼器109,所述连接构件包括连接座110、转轴111和连接杆112。
25.针对本具体实施方式,所述监控组件安装在所述外壳100的上方;所述底座105安装在所述外壳100的上方;所述监控器106安装在所述底座105的上方。所述底座105的下方安装有滚轮,便于巡检机器人行走巡检,所述底座105安装在所述外壳100的上方,所述底座
105的内部安装有电机,所述监控器106安装在所述底座105的上方,所述监控器106与电机的输出端固定,通过电机驱动所述监控器106转动,对所述监控器106安装的角度进行调整,便于所述监控器106全方位地对电力系统进行巡检工作。
26.其中,所述安装槽101位于所述外壳100的外侧,所述导向杆102与所述外壳100固定连接,并位于所述安装槽101中,所述安装块103与所述导向杆102滑动连接,所述防撞板104通过所述连接构件安装在所述安装块103上。所述外壳100的左右端面均开设有所述安装槽101,所述安装槽101中均安装有所述导向杆102,所述导向杆102上间隔安装有两个所述安装块103,所述安装块103与所述导向杆102的摩擦系数较大,所述防撞板104通过所述连接构件安装在两个所述安装块103上,所述防撞板104由橡胶制成,从而将所述防撞板104安装在所述外壳100的外侧对机器人进行防撞保护。
27.其次,所述弹簧107套设在所述导向杆102的外侧,并位于所述安装块103和所述外壳100之间;所述隔板108与所述导向杆102固定连接,并与所述外壳100固定连接;所述阻尼器109安装在所述隔板108和所述安装块103之间。所述弹簧107的两端分别与所述安装块103和所述外壳100固定,并套设在所述导向杆102的外侧,所述弹簧107的初始状态为收缩状态,所述隔板108固定在所述导向杆102的中部,所述导向杆102的左右两侧均设置有所述阻尼器109,所述阻尼器109的型号为802-49a,所述阻尼器109的一端与所述隔板108固定,另一端与所述安装块103固定。
28.同时,所述连接座110与所述安装块103固定连接;所述连接杆112通过所述转轴111安装在所述连接座110上。所述安装块103的前方固定有所述连接座110,所述连接座110的凹槽中转动安装有所述转轴111,所述防撞板104的弯部内侧相同安装有所述连接座110和所述转轴111,所述连接杆112的两端分别与两根所述转轴111转动连接。
29.使用本实施例的一种巡检机器人行走防撞设备时,当巡检机器人在行走过程中与物体发生碰撞时首先与所述防撞板104接触,通过弧形的所述防撞板104能更全面地对巡检机器人移动的前后方进行包围保护,同时通过所述防撞板104发生形变对产生的碰撞力进行吸收,从而对巡检机器人进行防撞保护,提高了对巡检机器人起到的防撞能力;其次当碰撞发生,所述防撞板104产生形变时,所述防撞板104对所述连接杆112进行挤压,所述连接杆112推动所述安装块103在所述导向杆102上移动,所述安装杆与所述导向杆102之间发生相对移动,由于所述安装块103与所述导向杆102之间的摩擦系数较大,使得所述安装块103在所述导向杆102上平缓的运动,所述安装块103在移动时牵拉所述弹簧107移动,通过所述弹簧107和所述阻尼器109配合,从而实现缓冲,可以极大降低碰撞产生的震动,从而稳定巡检机器人,避免其受到损伤。
30.第二实施例:
31.在第一实施例的基础上,请参阅图3和图4,图3是本发明第二实施例的巡检机器人行走防撞设备整体的结构示意图,图4是本发明第二实施例的巡检机器人行走防撞设备的正视图。本发明提供一种巡检机器人行走防撞设备还包括缓冲组件,所述缓冲组件包括安装轴213、转轮214和橡胶圈215。
32.针对本具体实施方式,所述安装轴213与所述防撞板104固定连接,并位于所述防撞板104的上方;所述转轮214与所述安装轴213转动连接,并位于所述安装轴213的顶部。所述防撞板104弯曲部的上方安装有所述安装轴213,所述安装轴213上安装有所述转轮214。
33.其中,所述橡胶圈215与所述转轮214固定连接,并套设在所述转轮214的外侧。所述转轮214的环面上均套设有所述橡胶圈215。
34.使用本实施例的一种巡检机器人行走防撞设备时,当巡检机器人发生碰撞时,所述橡胶圈215首先与物体接触,通过所述橡胶圈215形变初次缓冲;其次,发生碰撞时碰撞力驱使所述转轮214在所述安装轴213上转动,从而改变碰撞力的传递方向,并减少一部分碰撞力,从而实现对巡检机器人缓冲保护。
35.以上所揭露的仅为本技术一种或多种较佳实施例而已,不能以此来限定本技术之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本技术权利要求所作的等同变化,仍属于本技术所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
