一种智能测量小车
[技术领域]
[0001]
本实用新型涉及测量领域,具体地说是一种智能测量小车。
[
背景技术:
]
[0002]
目前,测量工作中采集数据的仪器设备有很多种,基本模式有两种,一种是固定架设仪器设备,另一种是测量人员携带测量仪器设备,例如:
[0003]
(1)采用全站仪测量时,全站仪安装架设在某一固定位置,棱镜固定安装在需要测量的位置,或者用三脚架等把棱镜架临时设在某一位置,或者测量人员手持对中杆(对中杆顶端安装棱镜),根据测量任务测量人员依次到达各个指定位置进行测量。
[0004]
(2)采用gnss测量时,gnss接收机固定安装在需要测量的位置,或者用三角架等把gnss接收机临时架设在某一位置,或者测量人员手持对中杆(对中杆顶端安装gnss接收机)或者背包携带gnss接收机,根据测量任务测量人员依次到达各个指定位置进行测量,或按一定路线行走完成测量。
[0005]
(3)采用激光扫描设备测量时,激光扫描设备固定安装在需要测量的位置,或者安装在汽车上,测量人员驾驶汽车按一定路线完成数据采集,或者测量人员手持或背包携带激光扫描设备,按一定路线行走完成数据采集。
[0006]
(4)采用扫平仪测量时,扫平仪固定安装在需要测量的位置,或用三脚架等临时把扫平仪架设在某一位置完成测量工作。
[0007]
(5)采用水准仪测量时,采用三脚架将水准仪架设在某一位置,测量人员携带水准尺,根据测量任务测量人员依次到达各个指定位置进行测量。
[0008]
以上几种常规测量方法中都需要测量人员携带测量设备到达目标位置,然后对中、整平、测量,这个工作需要专业的测量人员,受人类生理所限和安全考虑(比如步行速度,长时间连续工作,在高温、低压、极寒、强辐射、污染、有害气体等环境,有潜在危险的滑坡、地震、爆炸等情况),这种测量工作时间和效率受限;人为因素导致到偶然误差在所难免,导致精度不够、漏测、错测;需要额外提供其他保护,甚至无法开展测量工作。
[
技术实现要素:
]
[0009]
本实用新型的目的就是要解决上述的不足而提供一种智能测量小车,能够解决测量人员作业效率低、耗时长、工作时间和工作环境受限的问题,以及解决人员到达或存在安全隐患的作业环境的问题。
[0010]
为实现上述目的设计一种智能测量小车,包括麦克纳姆轮31、底板32、伺服电机33、标记模块36、双轴正交电机驱动微动平台44和测量装置46,所述麦克纳姆轮31设置有四个,且沿菱形布局方式布置,每个麦克纳姆轮31上均连接有伺服电机33,并与伺服电机33的输出端相连,四个麦克纳姆轮31和伺服电机33通过安装座39安装在底板32上,所述麦克纳姆轮31、伺服电机33、底板32构成麦克纳姆轮小车,所述标记模块36为一个可升降及转动的电钻装置,所述标记模块36的钻头端在地面打孔以形成测量标记,所述标记模块36与双轴
正交电机驱动微动平台44的输出端相连接,并在双轴正交电机驱动微动平台44的带动下沿横向和纵向滑动,所述双轴正交电机驱动微动平台44通过安装支架38安装在底板32上,所述双轴正交电机驱动微动平台44上连接有测量装置46,所述测量装置46与标记模块36同轴布置。
[0011]
进一步地,所述双轴正交电机驱动微动平台44包括基框1、横向导轨2、横向移动框3、横向弹簧4、横向移动驱动电机5、纵向移动框6、纵向导轨7、纵向弹簧8和纵向移动驱动电机9,所述横向移动框3安装在基框1上,所述横向移动驱动电机5的输出端连接横向移动框3,并驱动横向移动框3在横向导轨2上沿横向滑动,所述横向移动框3上连接有横向弹簧4,所述横向弹簧4用于使横向移动框3回到初始位置;所述纵向移动框6安装在横向移动框3上,所述纵向移动驱动电机9的输出端连接纵向移动框6,并驱动纵向移动框6在纵向导轨7上沿纵向滑动,所述纵向移动框6上连接有纵向弹簧8,所述纵向弹簧8用于使纵向移动框6回到初始位置。
[0012]
进一步地,所述标记模块36包括双轴倾斜传感器17、电钻电机18、微型编码电推杆、钻头20和电机21,所述微型编码电推杆包括壳体12、电机21和伸缩杆22,所述伸缩杆22通过壳体12连接在电机21上,并在电机21的带动下产生向下的推力,所述电机21安装在电钻圆柱形外壳11内顶部,所述电钻圆柱形外壳11内部水平安装双轴倾斜传感器17,所述双轴倾斜传感器17下方设有电钻电机18,所述电钻电机18输出端装设有钻头20,所述电钻电机18转动使得钻头20在地面打孔以形成测量标记。
[0013]
进一步地,所述电钻圆柱形外壳11上安装有阻尼装置,所述阻尼装置由空腔柱体13、推杆14和活塞15组成,所述活塞15与空腔柱体13内壁紧贴并在其中滑动,所述空腔柱体13端部开设有通孔16,并通过调整通孔16的直径以改变阻力的大小。
[0014]
进一步地,所述底板32上安装有外壳41,所述外壳41上安装有无线通讯天线42和单线激光雷达48,所述无线通讯天线42与无线通讯模块50连接,所述无线通讯天线42用于接收或发送数据给远端设备,所述单线激光雷达48用于探测前进方向是否有障碍物以避障。
[0015]
进一步地,还包括可拆卸式控制器47,所述可拆卸式控制器47可拆卸式安装于外壳41上或置于客户端,所述可拆卸式控制器47自带触摸屏,所述可拆卸式控制器47分别电连接伺服电机33、无线通讯模块50、双轴倾斜传感器17、双轴正交电机驱动微动平台44、单线激光雷达48。
[0016]
进一步地,所述底板32上通过电池仓安装有锂电池40,所述锂电池40分别电连接伺服电机33、电路板、无线通讯模块50、双轴倾斜传感器17、双轴正交电机驱动微动平台44、单线激光雷达48、可拆卸式控制器47,并为其供电。
[0017]
进一步地,还包括自动整平装置37,所述自动整平装置37与标记模块36连接,并与安装支架38固定。
[0018]
进一步地,所述双轴正交电机驱动微动平台44通过棱镜杆或基座45连接测量装置46,所述测量装置46为棱镜、全站仪、gnss接收机、激光扫描仪、扫平仪或条码尺。
[0019]
本实用新型同现有技术相比,具有如下优点:
[0020]
(1)本实用新型小车由四个麦克纳姆轮驱动自行走,其双轴正交驱动微动平台,可快速完成精确对中作业;
[0021]
(2)本实用新型标记模块包是一个可控制升降及转动的电钻,既可以在水泥、沥青等硬质地面打孔标记,在地面有水、泥土等物质时,采用喷绘方式无法实现标记,电钻也可以通过打孔能完成有效标记;
[0022]
(3)本实用新型电钻内安装的微型编码电推杆,能实现钻头伸缩,推杆给钻头施加向下的力,以实现在硬质地面打孔,电推杆带有编码功能,能实时测量出钻头伸出长度,从而计算出与电钻同轴的测量设备中心到地面的真实距离;
[0023]
(4)本实用新型电钻圆周安装四个阻尼装置,该阻尼装置作用是避免小车行走时电钻与测量设备剧烈晃动,整平时能快速完成整平工作;
[0024]
(5)本实用新型可拆卸式控制器可以安装在小车上,小车按设置和路径规划自主完成测量任务,也可将控制器取下,以遥控方式完成测量任务;
[0025]
(6)本实用新型两个插拔电池及小车内置可充电电池,既保证小车可长时间连续作业,也可以实现不关机更换电池;
[0026]
(7)本实用新型小车强固型三防设计,抗电磁干扰,能胜任高温、低压、极寒、强辐射、污染、有害气体等环境,有潜在危险的滑坡、地震、爆炸等情况人类不适合或不能完成的测量任务;
[0027]
(8)本实用新型通过更换安装杆或者安装基座,小车可以搭载不同测量设备,完成多种测量任务;
[0028]
综上,本实用新型能够解决测量人员作业效率低、耗时长、工作时间和工作环境受限的问题;解决人为因素导致的精度不够、漏测、错测的问题;解决人员到达或存在安全隐患的作业环境的问题。
[附图说明]
[0029]
图1是本实用新型双轴正交电机驱动微动平台的结构示意图;
[0030]
图2是本实用新型标记模块处的结构示意图;
[0031]
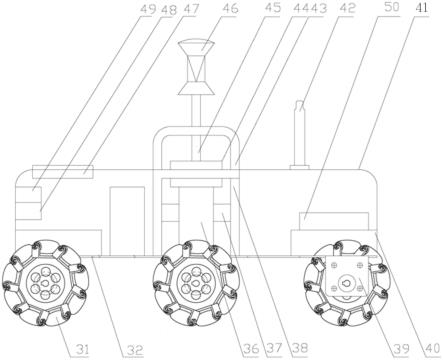
图3是本实用新型的正面结构示意图;
[0032]
图4是本实用新型的俯视结构示意图;
[0033]
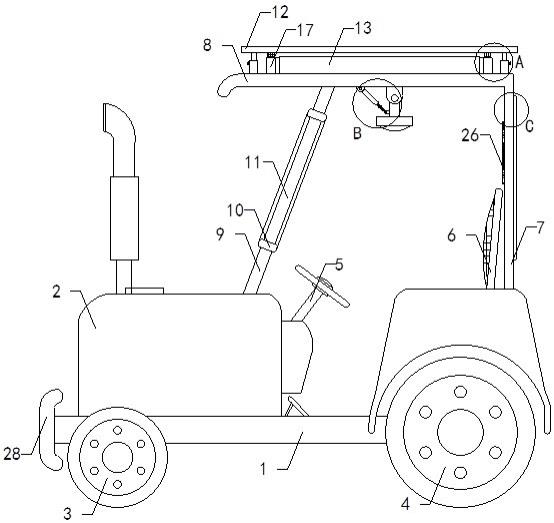
图5是本实用新型小车搭载360度棱镜结构示意图;
[0034]
图6是本实用新型小车搭载自动全站仪结构示意图;
[0035]
图7是本实用新型小车搭载gnss接收机结构示意图;
[0036]
图8是本实用新型小车搭载激光扫描仪结构示意图;
[0037]
图9是本实用新型小车搭载激光扫平仪结构示意图;
[0038]
图10是本实用新型小车搭载条码尺结构示意图;
[0039]
图中:1、基框 2、横向导轨 3、横向移动框 4、横向弹簧 5、横向移动驱动电机 6、纵向移动框 7、纵向导轨 8、纵向弹簧 9、纵向移动驱动电机 11、电钻圆柱形外壳 12、壳体 13、空腔柱体 14、推杆 15、活塞 16、通孔 17、双轴倾斜传感器 18、电钻电机 19、联轴器 20、钻头 21、电机 22、伸缩杆 31、麦克纳姆轮 32、底板 33、伺服电机 36、标记模块 37、自动整平装置 38、安装支架 39、安装座 40、锂电池 41、外壳 42、无线通讯天线 43、安装支架二 44、双轴正交电机驱动微动平台 45、棱镜杆或基座 46、测量装置 47、可拆卸式控制器 48、单线激光雷达 49、雷达安装座 50、无线通讯模块。
[具体实施方式]
[0040]
下面结合附图对本实用新型作以下进一步说明:
[0041]
如附图1至附图4所示,本实用新型提供了一种智能测量小车,包括麦克纳姆轮31、底板32、伺服电机33、标记模块36、双轴正交电机驱动微动平台44和测量装置46,麦克纳姆轮31设置有四个,且沿菱形布局方式布置,每个麦克纳姆轮31上均连接有伺服电机33,并与伺服电机33的输出端相连,由其驱动行走,四个麦克纳姆轮31和伺服电机33通过安装座39安装在底板32上,麦克纳姆轮31、伺服电机33、底板32构成麦克纳姆轮小车,标记模块36为一个可升降及转动的电钻装置,标记模块36的钻头端在地面打孔以形成测量标记,标记模块36与双轴正交电机驱动微动平台44的输出端相连接,并在双轴正交电机驱动微动平台44的带动下沿横向和纵向滑动,双轴正交电机驱动微动平台44通过安装支架38安装在底板32上,双轴正交电机驱动微动平台44上通过棱镜杆或基座45连接有测量装置46,测量装置46与标记模块36同轴布置。测量装置46可以为棱镜、全站仪、gnss接收机、激光扫描仪、扫平仪或条码尺,如附图5至附图10所示。
[0042]
如附图1所示,双轴正交电机驱动微动平台44包括基框1、横向导轨2、横向移动框3、横向弹簧4、横向移动驱动电机5、纵向移动框6、纵向导轨7、纵向弹簧8和纵向移动驱动电机9,横向移动框3安装在基框1上,横向移动驱动电机5的输出端连接横向移动框3,并驱动横向移动框3在横向导轨2上沿横向滑动,横向移动框3上连接有横向弹簧4,横向弹簧4用于使横向移动框3回到初始位置;纵向移动框6安装在横向移动框3上,纵向移动驱动电机9的输出端连接纵向移动框6,并驱动纵向移动框6在纵向导轨7上沿纵向滑动,纵向移动框6上连接有纵向弹簧8,纵向弹簧8用于使纵向移动框6回到初始位置。
[0043]
如附图2所示,标记模块36包括双轴倾斜传感器17、电钻电机18、微型编码电推杆、钻头20和电机21,微型编码电推杆包括壳体12、电机21和伸缩杆22,伸缩杆22通过壳体12连接在电机21上,并在电机21的带动下产生向下的推力,电机21安装在电钻圆柱形外壳11内顶部,电钻圆柱形外壳11内部水平安装双轴倾斜传感器17,双轴倾斜传感器17下方设有电钻电机18,电钻电机18输出端装设有钻头20,电钻电机18转动使得钻头20在地面打孔以形成测量标记。电钻圆柱形外壳11上安装有阻尼装置,阻尼装置由空腔柱体13、推杆14和活塞15组成,活塞15与空腔柱体13内壁紧贴并在其中滑动,空腔柱体13端部开设有通孔16,并通过调整通孔16的直径以改变阻力的大小。
[0044]
本实用新型中,底板32上安装有外壳41,外壳41上安装有无线通讯天线42和单线激光雷达48,无线通讯天线42与无线通讯模块50连接,无线通讯天线42用于接收或发送数据给远端设备,单线激光雷达48用于探测前进方向是否有障碍物以避障。还包括可拆卸式控制器47,可拆卸式控制器47可拆卸式安装于外壳41上或置于客户端,可拆卸式控制器47自带触摸屏,可拆卸式控制器47分别电连接伺服电机33、无线通讯模块50、双轴倾斜传感器17、双轴正交电机驱动微动平台44、单线激光雷达48。底板32上通过电池仓安装有锂电池40,锂电池40分别电连接伺服电机33、电路板、无线通讯模块50、双轴倾斜传感器17、双轴正交电机驱动微动平台44、单线激光雷达48、可拆卸式控制器47,并为其供电。还包括自动整平装置37,自动整平装置37与标记模块36连接,并与安装支架38固定。
[0045]
下面结合具体实施例对本实用新型作以下进一步说明:
[0046]
本实验装置包括麦克纳姆轮小车、整平对中模块、标记模块、电子及控制模块。
[0047]
整平对中模块包括仪器安装杆/座、自动整平装置、双轴正交电机驱动微动平台。其中,附图1所示为双轴正交驱动微动平台,横向移动框3安装在基框1上,横向移动驱动电机5驱动横向移动框在横向导轨2上滑动,横向弹簧4使得横向移动框3回到初始位置;纵向移动框6安装在横向移动框3上,纵向移动驱动电机9驱动纵向移动框在纵向导轨7上滑动,横向弹簧8使得横向移动框6回到初始位置。
[0048]
标记模块是一个可控制升降及转动的电钻装置,包括电机、钻头、微型电推杆、双轴倾斜传感器。其中,如附图2所示,微型编码电推杆由壳体12、电机21和伸缩杆22组成。微型编码电推杆产生向下的推力,根据伸缩杆22伸出的长度可以获得测量设备高程中心到地面的真实距离。在电钻圆柱形外壳11内部水平安装双轴倾斜传感器17,测量出与测量设备中心同轴的电钻倾斜值,来判断测量设备是否完成整平。电钻电机18转动使得钻头20在地面打孔,形成测量标记。在电钻圆柱形外壳11安装四个阻尼装置,阻尼装置由带通孔16的空腔柱体13、推杆14和活塞15组成,活塞15与空腔柱体13内壁紧贴并在其中滑动,调整通孔16的直径,改变阻力的大小。该阻尼装置作用是避免小车行走时电钻与测量设备剧烈晃动,整平时能快速完成整平工作。
[0049]
电子及控制模块包括电池、电路板、伺服电机、单线激光雷达、无线通讯模组、控制器、操作交互触摸屏。如附图3和附图4所示,四个麦克纳姆轮31和伺服电机33通过安装座39以菱形布局方式安装在底板32上面。标记模块36与双轴正交电机驱动微动平台44连接,并通过安装支架38安装在底板32上。自动整平装置37与标记模块36连接,并与安装支架固定。测量装置46根据不同作业任务可以更换(棱镜、全站仪、gnss、激光扫描仪、扫平仪),测量装置46通过棱镜杆或基座45与双轴正交电机驱动微动平台44连接,保证测量装置46与标记模块36同轴。两块锂电池40通过电池仓安装于底板32上,为伺服电机、电路板、无线通讯模块、双轴倾斜传感器、双轴正交电机驱动微动平台、单线激光雷达、控制器和触摸屏供电,保证足够工作时间、工作中可以更换电池。无线通讯天线42安装在外壳41上,与无线通讯模块50连接,用来接收或发送数据给远端设备。可拆卸式控制器47是自带触摸屏,可以规划路线和设置测量任务,启动任务后,控制器智能测量机器人小车全自动完成测量任务,也可以将可拆卸式控制器47取下来,在远端遥控智能测量机器人完成测量任务。单线激光雷达48安装在外壳41上,用来探测前进方向是否有障碍物,用来避障。
[0050]
本实验装置是一台智能测量小车,通过在小车上安装全站仪,或棱镜,或gnss接收机,或激光扫描设备,或扫平仪,或水准尺等,替代测量人员,根据设置和路径规划,智能小车可自行到达测量位置,自主完成相应的任务。该智能测量小车能够解决测量人员作业效率低、耗时长、工作时间和工作环境受限的问题;解决人为因素导致的精度不够、漏测、错测的问题;以及解决人员到达或存在安全隐患的作业环境的问题。
[0051]
本实用新型并不受上述实施方式的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。