1.本实用新型属于水下机器人技术领域,尤其涉及一种水下行走避障机器人。
背景技术:
2.水下行走小车在进行水下作业时容易遇到障碍物,导致水下工作无法进行。现有水下行走小车有的通过底盘升高进行越障,其升降范围有限,有的通过气囊充气上浮进行越障,其速度较慢,且可控性较差。为了解决上述问题,本实用新型设计了一种水下行走避障机器人,能够大大提高水下行走机器人的避障能力,保证水下作业的正常进行,适于规模化推广。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种水下行走避障机器人,能够大大提高水下行走机器人的避障能力,保证水下作业的正常进行。
4.技术方案:为实现上述目的,本实用新型的一种水下行走避障机器人,包括水下行走小车、水面牵引装置和牵引绳;所述水下行走小车行走于水底河床,所述水面牵引装置漂浮于水面,所述牵引绳从水面牵引装置引出并连接所述水下行走小车;所述水面牵引装置可收所述牵引绳提拉所述水下行走小车脱离水底河床,且水下行走小车具有可推进其平移的推进器集群。
5.进一步地,所述水下行走小车包括车底座和车身,所述车底座为履带式底座,所述车身为球形车身。
6.进一步地,所述水下行走小车具有摄像机,所述摄像机连接水下行走小车的车机系统;所述水面牵引装置包括浮力架和设置于浮力架上的绞车及总控制器,所述水下行走小车的车机系统与总控制器信号传输连接,所述总控制器控制所述绞车,所述推进器集群通过水下行走小车的车机系统控制。
7.进一步地,所述车身包括夹紧密封圈通过螺丝螺母紧固的上半球壳与下半球体;所述下半球体的前端内部开设有进水腔,所述进水腔的进水口覆盖有滤网;所述下半球体的后端内部开设有前移推进腔,所述下半球体的左端内部开设有右移推进腔,所述下半球体的右端内部开设有左移推进腔,所述前移推进腔、右移推进腔及左移推进腔均与进水腔连通,所述推进器集群包括安装在前移推进腔内的前移推进器、安装在右移推进腔内的右移推进器以及安装在左移推进腔内的左移推进器。
8.进一步地,位于车身前端的所述上半球壳上设置有向外凸起的观察窗,所述下半球体的上表面为设备安装面,所述摄像机安装在设备安装面上,且摄像机的镜头伸入观察窗内。
9.进一步地,所述浮力架由浮体上设置支撑板构成,所述支撑板上开设有绳孔,所述上半球壳的顶部设置有吊环,从绞车引出的所述牵引绳穿过绳孔栓在所述吊环上。
10.有益效果:本实用新型的一种水下行走避障机器人,有益效果为:在本实用新型
中,当水下行走小车遇到水下障碍物时,首先通过水面牵引装置2牵引提拉脱离河床,然后通过推进器集群推进前移越过障碍物或横移避开障碍物,随后将水下行走小车放下,避障非常轻松,大大提高水下行走机器人1的避障能力,保证水下作业的正常进行。
附图说明
11.附图1为本实用新型的整体结构示意图;
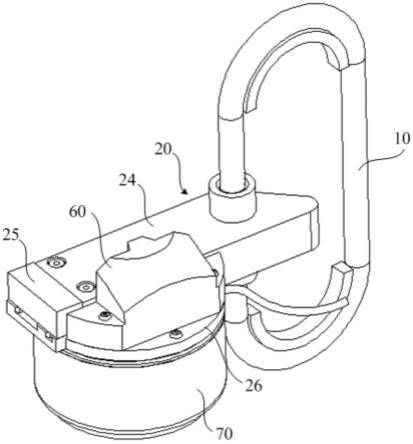
12.附图2为水下行走小车的半剖结构示意图;
13.附图3为车身的俯视结构示意图。
具体实施方式
14.下面结合附图对本实用新型作更进一步的说明。
15.如附图1所示,一种水下行走避障机器人,包括水下行走小车1、水面牵引装置2和牵引绳3;所述水下行走小车1行走于水底河床,所述水面牵引装置2漂浮于水面,所述牵引绳3从水面牵引装置2引出并连接所述水下行走小车1;所述水面牵引装置2可收所述牵引绳3提拉所述水下行走小车1脱离水底河床,且水下行走小车1具有可推进其平移的推进器集群。在本实用新型中,当水下行走小车1遇到水下障碍物时,首先通过水面牵引装置2牵引提拉脱离河床,然后通过推进器集群推进前移越过障碍物或横移避开障碍物,随后将水下行走小车1放下,避障非常轻松,大大提高水下行走机器人1的避障能力,保证水下作业的正常进行。
16.更为具体的,所述水下行走小车1包括车底座11和车身12,所述车底座11为履带式底座,不易陷入河床泥土中,提高通过性,所述车身12为球形车身,不易刮水下动植物,通过性也非常不错,而且车身12不易堆积污物,避免超重,也更加干净。
17.如附图1和附图2所示,所述水下行走小车1具有摄像机5,所述摄像机5连接水下行走小车1的车机系统;所述水面牵引装置2包括浮力架21和设置于浮力架21上的绞车22及总控制器23,所述水下行走小车1的车机系统与总控制器23信号传输连接,所述总控制器23控制所述绞车22,所述推进器集群通过水下行走小车1的车机系统控制。由摄像机5捕捉前方画面传送给车机系统,车机系统判断是否需要避障,当需要避障时,车机系统发送避障信号给总控制器23,总控制器23控制绞车22收绳提拉水下行走小车1,车机系统再控制推进器集群启动前移越过障碍物或横移避开障碍物,实现了自动化、智能化避障控制。
18.如附图3所示,所述车身12包括夹紧密封圈103通过螺丝螺母紧固的上半球壳121与下半球体122;所述下半球体122的前端内部开设有进水腔201,所述进水腔201的进水口覆盖有滤网102,防止水下污物进入;所述下半球体122的后端内部开设有前移推进腔202,所述下半球体122的左端内部开设有右移推进腔203,所述下半球体122的右端内部开设有左移推进腔204,所述前移推进腔202、右移推进腔203及左移推进腔204均与进水腔201连通,所述推进器集群包括安装在前移推进腔202内的前移推进器6、安装在右移推进腔203内的右移推进器7以及安装在左移推进腔204内的左移推进器8。水下行走小车1通过前移推进器6的推进可实现前移越过障碍物的避障操作,通过右移推进器7及左移推进器8的推进可实现横移避开障碍物的操作。
19.位于车身12前端的所述上半球壳121上设置有向外凸起的观察窗101,所述下半球
体122的上表面为设备安装面104,所述摄像机5安装在设备安装面104上,且摄像机5的镜头伸入观察窗101内。通过向外凸起的观察窗101的设置,能够提高摄像机5的画面捕捉范围。
20.所述浮力架21由浮体221上设置支撑板222构成,所述支撑板222上开设有绳孔220,所述上半球壳121的顶部设置有吊环100,从绞车22引出的所述牵引绳3穿过绳孔220栓在所述吊环100上。绳孔220对牵引绳3进行定位导向,避免牵引绳3跑偏。
21.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种水下行走避障机器人,其特征在于:包括水下行走小车(1)、水面牵引装置(2)和牵引绳(3);所述水下行走小车(1)行走于水底河床,所述水面牵引装置(2)漂浮于水面,所述牵引绳(3)从水面牵引装置(2)引出并连接所述水下行走小车(1);所述水面牵引装置(2)可收所述牵引绳(3)提拉所述水下行走小车(1)脱离水底河床,且水下行走小车(1)具有可推进其平移的推进器集群。2.根据权利要求1所述的一种水下行走避障机器人,其特征在于:所述水下行走小车(1)包括车底座(11)和车身(12),所述车底座(11)为履带式底座,所述车身(12)为球形车身。3.根据权利要求2所述的一种水下行走避障机器人,其特征在于:所述水下行走小车(1)具有摄像机(5),所述摄像机(5)连接水下行走小车(1)的车机系统;所述水面牵引装置(2)包括浮力架(21)和设置于浮力架(21)上的绞车(22)及总控制器(23),所述水下行走小车(1)的车机系统与总控制器(23)信号传输连接,所述总控制器(23)控制所述绞车(22),所述推进器集群通过水下行走小车(1)的车机系统控制。4.根据权利要求3所述的一种水下行走避障机器人,其特征在于:所述车身(12)包括夹紧密封圈(103)通过螺丝螺母紧固的上半球壳(121)与下半球体(122);所述下半球体(122)的前端内部开设有进水腔(201),所述进水腔(201)的进水口覆盖有滤网(102);所述下半球体(122)的后端内部开设有前移推进腔(202),所述下半球体(122)的左端内部开设有右移推进腔(203),所述下半球体(122)的右端内部开设有左移推进腔(204),所述前移推进腔(202)、右移推进腔(203)及左移推进腔(204)均与进水腔(201)连通,所述推进器集群包括安装在前移推进腔(202)内的前移推进器(6)、安装在右移推进腔(203)内的右移推进器(7)以及安装在左移推进腔(204)内的左移推进器(8)。5.根据权利要求4所述的一种水下行走避障机器人,其特征在于:位于车身(12)前端的所述上半球壳(121)上设置有向外凸起的观察窗(101),所述下半球体(122)的上表面为设备安装面(104),所述摄像机(5)安装在设备安装面(104)上,且摄像机(5)的镜头伸入观察窗(101)内。6.根据权利要求4所述的一种水下行走避障机器人,其特征在于:所述浮力架(21)由浮体(221)上设置支撑板(222)构成,所述支撑板(222)上开设有绳孔(220),所述上半球壳(121)的顶部设置有吊环(100),从绞车(22)引出的所述牵引绳(3)穿过绳孔(220)栓在所述吊环(100)上。
技术总结
本实用新型公开了一种水下行走避障机器人,包括水下行走小车、水面牵引装置和牵引绳;水下行走小车行走于水底河床,水面牵引装置漂浮于水面,牵引绳从水面牵引装置引出并连接水下行走小车;水面牵引装置可收牵引绳提拉水下行走小车脱离水底河床,且水下行走小车具有可推进其平移的推进器集群。本实用新型提供的一种水下行走避障机器人,能够大大提高水下行走机器人的避障能力,保证水下作业的正常进行。保证水下作业的正常进行。保证水下作业的正常进行。
技术研发人员:史志军 张文博 杨童 金旭辉
受保护的技术使用者:西安工业大学
技术研发日:2022.04.12
技术公布日:2022/8/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。