技术特征:
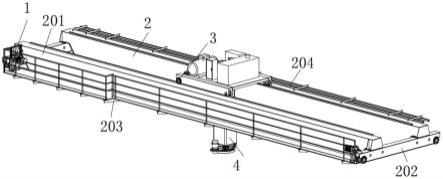
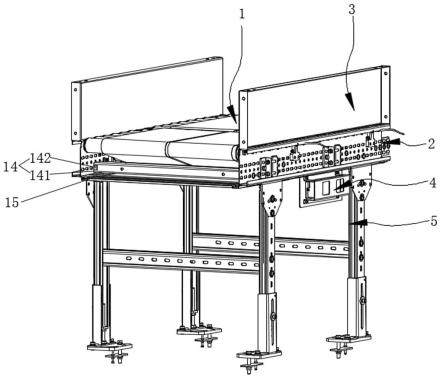
1.一种绿色环保型钢铁搬运机器人,包括位移大车(1),其特征在于:所述位移大车(1)上设有金属桥架(2),所述金属桥架(2)包括主梁(201),所述位移大车(1)上安装有主梁(201),所述位移大车(1)和主梁(201)上均设有位移小车(3),所述位移小车(3)包括小车架(301)、驱动装置(302)和行走轮(303),所述位移大车(1)上设有多组驱动装置(302)和行走轮(303),所述小车架(301)上设有吊装装置(4)。2.根据权利要求1所述的一种绿色环保型钢铁搬运机器人,其特征在于:所述金属桥架(2)顶端设有小车架(301),所述小车架(301)的四角处均安装有驱动装置(302)和行走轮(303),所述金属桥架(2)与对应的两个行走轮(303)相互贴合。3.根据权利要求2所述的一种绿色环保型钢铁搬运机器人,其特征在于:所述吊装装置(4)包括驱动电机(401)、液压油箱(402)、电控箱(403)、散热风机(404)和起升机构(405),所述小车架(301)上安装有驱动电机(401)、液压油箱(402)和电控箱(403),所述小车架(301)上安装有散热风机(404)和起升机构(405)。4.根据权利要求3所述的一种绿色环保型钢铁搬运机器人,其特征在于:所述驱动电机(401)采用开关磁阻电机,所述起升机构(405)采用具有防摇摆功能的伸缩臂结构。5.根据权利要求4所述的一种绿色环保型钢铁搬运机器人,其特征在于:所述驱动电机(401)驱动主泵,使得液压油从油箱打入油缸,带动油缸进行伸缩,从而实现伸缩臂伸缩。6.根据权利要求5所述的一种绿色环保型钢铁搬运机器人,其特征在于:所述位移大车(1)上设置的多组驱动装置(302)和行走轮(303)带动整个钢铁搬运机器人沿x轴方向往复运动,所述小车架(301)上的多组驱动装置(302)和行走轮(303)带动整个钢铁搬运机器人沿y轴方向往复运动。7.根据权利要求6所述的一种绿色环保型钢铁搬运机器人,其特征在于:所述主梁(201)上安装有端梁(202)、走台(203)和电缆支架(204),所述起升机构(405)与起重机纵移机构连接。8.根据权利要求7所述的一种绿色环保型钢铁搬运机器人,其特征在于:所述起升机构(405)底端设有法兰,可连接各式起重机机械抓手。9.根据权利要求8所述的一种绿色环保型钢铁搬运机器人,其特征在于:所述驱动装置(302)的电机可正反转,所述驱动装置(302)的输出端与行走轮(303)相互连接,所述行走轮(303)为装配式设计。
技术总结
本实用新型涉及钢铁搬运机器人技术领域,具体的说是一种绿色环保型钢铁搬运机器人,包括位移大车,所述位移大车上设有金属桥架,所述金属桥架包括主梁,所述位移大车上安装有主梁,所述位移大车和主梁上均设有位移小车,所述位移小车包括小车架、驱动装置和行走轮,所述位移大车上设有多组驱动装置和行走轮,所述小车架上设有吊装装置;通过设置位移大车、金属桥架、位移小车和吊装装置,该装置具有具有维护方便,工作效率高,运营成本低,运行电机绿色节能,环境友好,避免钢铁搬运机器人运行中吊具发生摇晃现象,载荷定位精度高,可实现毫米级定位等特点。米级定位等特点。米级定位等特点。
技术研发人员:蔡红 葛静 屈茂清 刘纯圣 杨建利 徐振勇
受保护的技术使用者:山东力山特智能科技股份有限公司
技术研发日:2022.04.11
技术公布日:2022/8/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。