1.本发明涉及一种用于操作容器处理设备的方法。本发明还涉及一种容器处理设备。
背景技术:
2.本公开基于ep 0 180 828 b1。其公开了一种用于把氧敏感的液体例如啤酒充注到瓶子等中的方法。在每个瓶子中,在与填充机构连接后,通过压入张力气体而产生过压。于是保持在过压下的液体被引入到瓶子中,直到液体过满。然后通过引入保持在较大过压下的纯co2将液体部分地挤出瓶子并被纯co2取代,直到达到所需的填装高度。然后将瓶子从填充机构上拉下,运送到封闭站,并在那里通过盖上封闭盖而封闭。
3.传统填装系统和相关联的驱动控制的一个主要缺点是,在瓶子破裂时,特别是在填装转盘中有多个瓶子彼此并排地放置的情况下,充注压力和/或校正压力会立即崩溃。于是无法对过满的瓶子进行无故障的校正。未校正填充液位的瓶子(黑色填充)可以传送到封盖机,然后在封盖过程期间在封盖机中以不受控制的方式破碎。在此,封闭塞子或天然软木塞在不存在必要的顶部空间的情况下以大的封闭力压入瓶口,这导致瓶子爆裂。
4.ep 2 803 625 a1公开了一种具有中央控制单元的填装机的填装单元。传感器元件的存在允许监控诸如容器爆裂的故障的发生。填充过程可以立即停止,并采取适当措施保护填装机。
技术实现要素:
5.本发明的目的在于,提出用于操作容器处理设备的替代的和/或改进的技术,优选地减少产品损失,尽管例如由于容器爆裂所致的故障。
6.该目的通过独立权利要求1的特征来实现。有利的改进在从属权利要求和说明书中说明。
7.本公开的一个方面涉及一种用于操作容器处理设备(优选全自动或半自动)的方法,该容器处理设备具有填装转盘和出料输送机,该出料输送机被设置用来从填装转盘接收容器。该方法包括(例如连续地)监测填装转盘的至少一个流体参数。该方法包括,如果至少一个监测的流体参数(例如通过低于或超过极限值)呈现不允许的值,则从容器处理设备的正常操作模式切换到容器处理设备的异常操作模式。异常操作模式包括暂停填装转盘(例如基本上在整个异常操作模式期间)。
8.异常操作模式还包括:a1)在填装转盘暂停期间填充填装转盘中的容器;a2)等待,直到在填装转盘暂停期间至少一个监测的流体参数(例如通过低于或超过限值)呈现允许的值;和a3)在填装转盘暂停期间,如果至少一个监测的流体参数已经呈现允许的值(并且例如已经填充容器),校正被填充的容器的填装高度。
9.替代地或附加地,异常操作模式还包括:b1)将出料输送机与填装转盘去耦(例如将填装转盘和出料输送机的驱动器去耦,和/或在填装转盘暂停和/或已暂停期间);以及
b2)(例如在填装转盘暂停期间)使出料输送机空转(leerfahren)。
10.根据配置而定,因而可以产生不同的、可组合的优点,这些优点尤其旨在减少产品损失。例如,可以防止或至少显著减少出现未校正填装高度的容器。由此例如可以防止由于不正确填充容器而导致的产品损失。可行的是,在下游封闭装置中防止未经填充高度校正的容器的容器破裂。通过去耦或疏通和清空,所有在仍正常操作模式下被校正填装高度的容器都可以在下游处理机构中进一步处理,例如用于容器的封闭且必要时容器的接线,从而也可以减少在填装机机下游的产品损失。
11.在一个实施例中,至少一个监测的流体参数包括用于填充容器的充注压力、用于校正填装高度的校正压力和/或填装转盘的液体罐的填装水平。替代地或附加地,可以选择至少一个监测的流体参数,使得它允许推断出填装转盘中的至少一个容器的损坏(例如爆裂、破损等)。
12.充注压力优选地可以是在填充容器时液体的压力。
13.例如,校正压力可以是在惰性气体供应管线(例如惰性气体压力容器和/或惰性气体管线)与充注压力之间的压差。校正压力例如可以优选是液体从容器被压回到填装站中的压差(例如在供应的惰性气体和填充容器中的液体压力之间的差)。可以优选地采用co2作为惰性气体。
14.容器处理机构可以优选地具有用于检测流体参数的相应的传感件,例如压力传感器、流量传感器、填装高度传感器、光学传感器(例如用于光学地检测容器爆裂)等。
15.在另一实施例中,填装转盘的流体调节回路在等待期间振荡,直到监测的流体参数呈现允许值。有利地,可以在振荡稳定之后再次对容器进行过程可靠的填装高度校正。
16.在另一实施例中,容器处理设备还具有布置在出料输送机下游的封闭装置(例如冠形软木塞封盖机、塞子封盖机或软木塞封盖机)。关于封闭装置,异常操作模式还可以包括:从出料输送机接收容器,优选直到出料输送机空转(例如在填装转盘暂停期间);封闭接收的容器(例如在填装转盘暂停期间);可选地,在接收的容器的封闭之后(例如在填装转盘暂停期间)空转。有利地,即使在填装转盘暂停的异常操作模式期间,封闭仍可以实现也防止在尚未封闭的容器中的填装材料出现产品污染等。
17.在一个实施方式中,容器处理设备还具有布置在封闭装置下游的接线机构。关于接线机构,异常操作模式还可以包括:从封闭装置接收经封闭的容器,优选直到封闭装置空转(例如在填装转盘暂停期间),并且对接收的经封闭的容器进行接线(例如在填装转盘暂停期间)。由此可以优选地防止在异常操作模式中已经用软木塞或塞子封闭的容器的不希望的开塞。这样例如可以防止产品损失和污染。
18.在另一实施方式中,容器处理设备还具有布置在填装转盘上游的至少一个容器输送和/或容器处理机构、优选地用于将容器传送到填装转盘的进料输送机(例如进料输送星形件)和/或用于冲洗容器的容器冲洗机构。异常操作模式还可以包括,使得至少一个容器输送和/或容器处理机构暂停。优选地,以此方式,在异常操作模式下暂停填装转盘不会导致上游机构出现问题。
19.在一个设计变型中,当容器在异常操作模式下被填充时,填充填装转盘中的尚未在正常操作模式下被完全填充的所有容器,这些容器的填装高度在正常操作模式下还没有被完全校正,和/或填充所有容器直至填装转盘的最大回风管角度。
20.优选地,最大回风管角度(或回气管角度)可以由在正常操作中在填装高度校正部段和填装转盘的卸载部段之间的边界线来确定。最大回风管角度也可以处在卸载部段中。最大回风管角度也可以由在传送至出料输送机之前降低填装转盘中的容器所需部段的开始部分来限制。
21.在另一设计变型中,当容器的填装高度在异常操作模式中被校正时,填装转盘中所有先前填充的容器的填装高度都被校正。因此可以防止出现未校正填装高度的容器以及随后的后续问题。
22.在另一设计变型中,当在异常操作模式下校正容器的填装高度时,在填装转盘的用于接收容器的接收部段与填装转盘的最大回风管角度之间的所有容器的填装高度都被校正,优选从最大回风管角度开始。于是同样可以防止出现未校正填装高度的容器及随后的后续问题。从最大回风管角度开始的校正可以有利地允许填装转盘还在所有容器的填装高度校正完成之前再次启动,以及切换到正常操作模式中。由此可以提高吞吐量。
23.在一个实施例中,填装转盘在异常操作模式下通过单独的快速停止功能或紧急停止功能而暂停。填装转盘优选可以特别快地暂停,从而可以降低未进行或未充分进行填装高度校正的容器已经移动超过最大回风管角度例如移动到出料输送机的风险。由此可以有利地进一步降低未校正填装高度的容器的风险。
24.在另一个实施例中,在填装转盘暂停期间(例如也不管至少一个被监测的流体参数被允许还是不允许),在异常操作模式下对填装转盘进行所有处理,直到包括容器的填充(例如预抽真空、预加载和填充)。于是优选地可以实现对所有容器进行随后的填装高度校正,特别是也对于与进料输送机的接收部段相邻的完全预抽真空、预加载和填充的容器。
25.在另一实施例中,异常操作模式还包括以下至少一种:在填装转盘暂停期间,将填装转盘中的那些在正常操作模式中尚未或尚未完全预抽真空的容器预抽真空;在填装转盘暂停期间,将那些在正常操作模式中尚未或尚未完全预加载的容器预加载。
26.如果至少一个流体参数(仍然)是不允许的,则可以优选在等待期间在异常操作模式中执行预抽真空、预加载和/或填充。但也可行的是,如果至少一个流体参数(又)是允许的,则在等待之后,才在异常操作模式中执行预抽真空、预加载和/或填充。
27.在一个实施方式中,该方法还包括,在被填充的容器的填装高度已被校正并且所监测的至少一个流体参数已呈现允许值之后,从异常操作模式切换为正常操作模式。切换优选地包括,将出料输送机与填装转盘耦接,用于从填装转盘接收容器(例如使得出料输送机和填装转盘的驱动器耦接,或者使得出料输送机和填装转盘的驱动器同步)。
28.在另一个实施方式中,正常操作模式包括,旋转填装转盘、在填装转盘旋转期间填充填装转盘中的容器,和/或在填装转盘旋转期间校正被填充的容器的填装高度。
29.在另一个实施方式中,正常操作模式还包括以下至少一种:在填装转盘旋转期间将填装转盘中的容器预抽真空;在填装转盘旋转期间将填装转盘中的容器预加载;在填装转盘旋转期间将经填装高度校正的容器卸载。
30.在另一个实施方式中,对填装转盘中的容器的填充是过度填充(即高于目标填装高度)或将容器填满到边缘。
31.在另一个实施方式中,分别借助位于经填充的容器的顶部空间中的回风管对容器的填装高度进行校正(通过该回风管,例如把液体从经填充的容器的顶部空间中引出,直到
填装高度达到回风管的开口或切槽)。
32.本公开的另一方面涉及一种容器处理设备(例如用于液体介质优选饮料或液体食品的容器的制造、清洁、测试、填充、封闭、贴标签、印刷和/或包装),其具有填装转盘、被设置用来从填装转盘接收容器的出料输送机(例如出料星形件)和被设计用来根据如这里公开的方法优选全自动地或半自动地来操作容器处理设备的控制单元。
33.术语“控制单元”可以优选地指代电子设备(例如具有微处理器和数据存储器)和/或机械的、气动的和/或液压的控制器,该电子设备根据设计而定地可以承担控制任务和/或调节任务和/或处理任务。即使在此使用术语“控制”,它也可以有益地包括或表示“调节”或者说“带反馈的控制”和/或“处理”。
34.本发明的前述优选实施方式和特征可任意地相互组合。
附图说明
35.下面参照附图介绍本发明的其它细节和优点。其中:
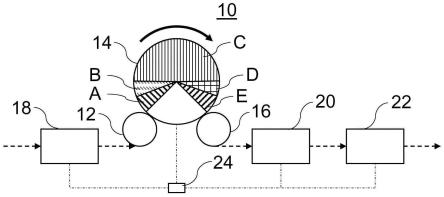
36.图1是根据本公开的实施例的容器处理设备的纯示意图;
37.图2是用于处理容器的示例性部段的示意图;
38.图3是容器的预抽真空的示意图;
39.图4是容器的预加载的示意图;
40.图5是容器的填装的示意图;
41.图6是容器填装结束时的示意图;
42.图7是容器的填装高度的校正的示意图;
43.图8是容器卸载的示意图;
44.图9是容器的封闭的示意图;和
45.图10是容器封闭结束时的示意图。
46.这些图中所示的各实施方式至少部分地一致,因而给类似的或相同的部分标有相同的附图标记,在其阐述时,也参见针对其它实施方式或附图的说明,以避免重复。
具体实施方式
47.图1示出了用于处理容器、优选玻璃瓶的示例性的容器处理设备10。根据在相应应用情况下的卫生要求而定地,容器处理设备10可以至少部分地被设计用于无菌处理、高纯度处理或标准处理。要明确指出,当前公开的技术并非仅可用于液体的冷无菌填装。
48.容器处理设备10具有进料输送机12、填装转盘14和出料输送机16。
49.进料输送机12设置在填装转盘14的上游,用于将容器传送到填装转盘14。出料输送机16布置在填装转盘14的下游,用于从填装转盘14接收容器。进料输送机12和出料输送机16被设计为运输星形部。
50.填装转盘14布置成接收来自进料输送机12的容器。填装转盘14被布置成将容器转移到出料输送机16。填装转盘14设计为圆转子。填装转盘14可以通过驱动器旋转。当转动时,容器被移动到出料输送机16。填装转盘14具有大量填装站。填装站围绕填装转盘14的圆周分布地布置。当填装转盘14旋转时,填装站随之旋转。填装转盘14被设计用于填充容器,并校正填充容器的填装高度(=填装高度校正功能)。
51.如果在相应的应用情况下需要的话,填装转盘14可以附加地对容器进行预抽真空、预加载和/或减压。也可行的是,填充和/或容器的填装高度的校正以不同于这里示例性地所公开的方式进行。图1中以期望的顺序在填装转盘14的正常操作模式中用不同的阴影线示出了填装转盘14的圆形路径的弧形或角形部段,其用于预抽真空(见a部段)、预加载(见b部段)、填充(见c部段)、校正填装高度(见d部段)和减压(见e部段)。此处例如参考图2至图8介绍用于预抽真空、预加载、填充、校正填装高度和减压的示例性设计的细节。
52.容器处理设备10可以具有至少一个容器运输和/或处理机构18、封闭装置20和/或接线机构22。机构18、20和22均可以以直线式配置或旋转式配置来设计。
53.至少一个机构18布置在进料输送机12的上游。例如,至少一个机构18可以具有运输节段、运输星形部和/或用于清洗容器的清洗机构。
54.封闭装置20布置在出料输送机16的下游。封闭装置20被设计用于例如利用冠形软木塞、塞子或软木塞来封闭容器。
55.接线机构22布置在封闭装置20的下游。接线机构22被设计用于将利用塞子或软木塞封闭的容器接线。
56.容器处理设备10具有控制单元24。控制单元24被设计用于以正常操作模式和异常操作模式操作容器处理设备10,其将在本文别处更详细地解释。控制单元24可以被设计为用于操作容器处理设备10的多个机构的中央控制单元,或者被设计为彼此连接的分散式控制单元,这些控制单元分别控制容器处理设备10的机构。
57.参考图2至图10,以下纯示例性地描述填装转盘14和封闭装置20的构造和工作方式。在所描述的配置中,填装转盘14尤其可以用于把大量起泡的氧敏感的饮料(例如啤酒)填充入设计为瓶子的容器中。
58.图2示出了第一压力容器(=液体罐)26、第二压力容器28、第三压力容器30、填装站32和封闭机构34。填装站32可以是图1的填装转盘14的多个填装站之一。压力容器26-30可以是图1的填装转盘14的一部分,或者可以布置在图1的填装转盘14的外部。封闭机构34可以是图1的封闭装置20的一部分。
59.第一压力容器26通过管线36与液体源38例如饮料源比如啤酒源连接。液体源38可以处于例如约7巴-8巴的过压之下。在管线36中接入调节阀40。调节阀40由调节器42控制。
60.填充探头44可以定位在第一压力容器26内。填充探头44被设计用于检测第一压力容器26的填装高度。填充探头44与调节器42进行信号连接。调节器42被设计用于通过关闭和打开调节阀40将第一压力容器26中的填装高度保持在期望的值。
61.管线46通入第一压力容器26。管线46经由调节阀48通向环境大气或外部。调节阀48由调节器50控制,其功能将在下面进一步解释。
62.第二压力容器28与真空源52例如真空泵连接。通过该真空源,第二压力容器28被抽真空至例如0.1巴-0.2巴的绝对压力。
63.第三压力容器30通过管线54与惰性气体源56连接。由惰性气体源56供应的惰性气体例如可以是无菌空气、氮气和/或co2。惰性气体由惰性气体源56以例如大约8巴-10巴的过压供应。带有压力调节器60的减压阀58被接入管线54中。通过压力调节器60,第三压力容器30中的惰性气体的超压恒定地保持在例如约6.8巴。
64.调节器42、50、60可以包括在参照图1解释的控制单元24中。
65.用于调节阀48的调节器50被设计为差压调节器。调节器50一方面与在调节阀48和第一压力容器26之间的区域中的管线46连接,或者例如直接与第一压力容器26的气体空间连接。另一方面,调节器50与在减压阀58和第三压力容器30之间的管线54连接,或直接与第三压力容器30连接。
66.调节器50经过设计,从而它通过打开和关闭调节阀48来使得管线46中或第一压力容器26中的压力保持比管线54中或第三压力容器30中低例如大约0.4巴-0.5巴。因此第一压力容器26中的液体和气体处于例如约6.4巴的恒定过压下。
67.填装站32与三个压力容器26、28、30连接。类似于填装站32,图2中未示出的其他填装站同样与压力容器26、28、30连接。
68.填装站32具有填装头62、回风管64(也称为回气管或回风管)、液体管线66和气体通道68。
69.填装头62可以具有例如锥形的定中开口和未示出的弹性密封圈。填装头62可以压靠到容器70(例如玻璃瓶)的容器口(瓶口)上。
70.在填装头62的中心,可以固定回气管64。回气管64在下端具有开口或切槽。回气管64通过回气管线72和回气阀74与第一压力容器26的气体空间连接。回气管64可以设计成可竖直地移动。
71.液体管线66通入填装头62中。在液体管线66中安装了液体阀76。液体管线66与处于比填装头62更高的高度的第一压力容器26的液体腔室连接。
72.气体通道68与填装头62连接。气体通道68经由真空阀78与第二压力容器28连接。气体通道68经由惰性气体阀80与第三压力容器30连接。气体通道68可以通过卸载阀82与自由大气连接。
73.对填装站32的阀74、76、78、80和82的触动例如以电磁方式进行。对阀74、76、78、80和82的触动可以特别是独立于填装站32的循环路径进行,该循环路径由填装转盘14的旋转引起(见图1).
74.填装站32被分配有(例如气动的、液压的或电磁的)升降缸83,该升降缸带有可升高和降低的容器支撑件84(例如容器盘)。可以借助升降缸83和容器支撑件84分别将容器70压靠到填装头62上。容器70可以相对于周围大气被封闭,并且气密地且液密地与填装头62或与通向其中的管线和通道连接。
75.封闭机构34例如可在高度上移动地布置在高度固定的容器支撑件86(例如容器盘)上方。封闭机构34具有封闭锥体88和例如弹簧加载的压紧器90。封闭机构34被设计用于将冠形软木塞92固定在容器70的容器口上。在封闭之前,冠形软木塞92可以例如通过磁力保持在压紧器90的下侧。也可行的是,封闭机构34替代地被设计用于通过塞子或软木塞(例如天然软木塞)来封闭。
76.可以围绕封闭机构34布置多个吹嘴94。这些吹嘴94可以朝向在封闭机构34的下侧和容器口之间的中间空间。吹嘴94可以与供应管线96连接。供应管线96可以经由转换阀98与来自第一压力容器26的管线46连接,或者例如直接与第一压力容器26的气体室连接。可以向吹嘴96供给在正常填充时连续流出第一压力容器26的几乎纯净的惰性气体(例如co2)。替代地例如也可行的是,将吹嘴94直接连接到惰性气体源56上。吹嘴94经过定向,从而在封闭机构34和容器口之间产生主要包含惰性气体的气氛,该气氛围绕冠形软木塞92和
容器口。
77.在管线8和14之间可以布置具有截止阀102的连接管线100。在需要情况下,第一压力容器26因此可以直接与惰性气体源56连接。
78.附加地,可以把具有截止阀106的清洁管线104连接到管线36上。第一压力容器26可以通过清洗管线104被填充水等用于清洗。
79.优选地,在填充开始之前,第一压力容器26通过清洗管线104完全填充水。然后可以通过打开截止阀106借助惰性气体来挤出水。然后,可以通过调节阀40,在截止阀102和106关闭的情况下,第一压力容器26由液体源38被部分地填充。多余的惰性气体可以通过管线46和调节阀48排出。通过这种方式,从一开始就在很大程度上避免了液体和空气之间的接触。为此可能还需要的阀和管线未在图2中示出。如果真空源52现在还在工作,则该装置可以准备好运行。
80.下面参照图1至图10描述容器处理机构10的正常操作模式。
81.首先,容器70可以由机构18处理,如果存在并且需要的话,例如清洁或冲洗。经清洁的空容器70由进料输送机12接收。
82.旋转的进料输送机12将容器70相继地传送到填装站32或旋转的填装转盘14的容器支撑件84。图2相应地示出了在容器支撑件84上的干净的空容器70。在传送期间,阀74、76、78、80、82关闭。升降缸29将容器70的容器口牢固地压靠到填装头62上。容器70可以基本上(例如100%)被填充空气(由图2中的小十字表示)。
83.在接收容器70之后,对容器70进行预抽真空。对容器70的预抽真空在填装转盘14旋转期间在填装转盘14的填装站32的圆形路径的角部段a(见图1)中进行。
84.图3示出了预抽真空。在预抽真空时,真空阀78打开一段时间。由此使得容器70通过气体通道68连接到第二压力容器28上。空气经由气体通道68从容器70中抽出。容器70被抽真空至例如大约0.1巴到0.2巴的绝对压力。初始空气因此被抽出例如90%,因此容器中的空气浓度现在可以为10%。预抽真空随着真空阀78关闭而结束,容器70可以进行多次预抽真空。
85.在容器70被预抽真空之后,对容器70进行预加载。对容器70的预加载在填装转盘14旋转期间在填装转盘14的填装站32的圆形路径的角部段b(见图1)中进行。
86.图4示出了预加载。在预加载时,惰性气体阀80打开一定时间。容器70通过气体通道68与第三压力容器30连接。惰性气体(例如纯co2)从第三压力容器30经由惰性气体阀80和气体通道68流入容器70(由小圆圈表示),例如直到在容器70中达到例如约6.8巴的压力。由此进一步将容器70中的空气浓度降低到大约2.5%。因此在容器70中产生了几乎纯净的惰性气体气氛。在预加载结束时,惰性气体阀80可以关闭。
87.在容器70预加载之后,对容器70进行填装。对容器70的填装在填装转盘14旋转期间在填装转盘14的填装站32的圆形路径的角部段c(见图1)中进行。
88.图5示出了填装,图6示出了在填装结束时的状态。通过打开液体阀76和回气阀74开始填装。首先,一小部分气体经由回气管64和回气管线72流出容器70进入第一压力容器26中,直到在容器70中产生例如大约6.4巴的过压。由此可以防止气体从第一压力容器26流入容器70中并可能增加那里的空气浓度。
89.在压力平衡之后,由于第一压力容器26和容器70之间的高度差,液体(用短划线表
示)经由液体管线66进入到容器70中。几乎纯净的惰性气体(例如co2)经由回气管64和回气管线72从容器70被挤压到第一压力容器26中。在第一压力容器26中,在经过些许时间之后,同样可以产生几乎纯净的空气浓度为例如约2.5%的惰性气体气氛,使得无论在第一压力容器26中的停留期间,还是在经由填装站32进入容器70期间,都不会发生空气氧对液体的可察觉的影响。
90.当容器70中的液体水平已达到回气管64的开口时,就不会再有气体经由该回气管逸出。然而,液体继续流入,因为气体现在可以经由设计为没有气体屏障的液体管线66向上流入到第一压力容器26中。在填装结束时,容器70可能被过填充或填满到边缘(参见图6)。在填装结束时,液体阀76关闭。回气阀74保持继续打开。
91.在填装容器70之后,对容器70的填装高度进行校正。对容器70的填装高度的校正在填装转盘14旋转期间在填装转盘14的填装站32的圆形路径的角部段d(见图1)中进行。
92.图7示出了对填装高度的校正。为了校正填装高度,惰性气体阀80打开预定的时间段。该时间段可以相对较短。纯惰性气体(例如co2)从惰性气体源56经由惰性气体阀80和气体通道68以例如约0.4巴-0.5巴的差压或校正压力流入容器70中。
93.流入容器70的惰性气体迫使容器70中的液体经由回气管64进入回气管线72中。如此多的液体被挤出,直到容器70中的液体水平下降到回气管64的开口的水平或略低于该水平。从容器70排出的液体经由回气管线72被引导到第一压力容器26中。同时,由此在容器70中产生的空闲空间被纯惰性气体填充。容器70现在只包含液体和惰性气体。
94.惰性气体阀80的打开持续时间可以设计为,使得足够的惰性气体流入容器70中,以便将液体从回气管线72完全输送回到第一压力容器26中,并将可能的残留空气从容器70中完全冲出。另外,因后流入的纯惰性气体,第一压力容器26内的空气浓度降低,从而产生2.5%以下的值。
95.由于低压差(=校正压力),液体和惰性气体的溢出进行得非常温和。这种低压差/校正压力是可能的,因为回气阀74必须保持打开并且不形成节流点。在惰性气体阀80关闭之后或关闭的同时,也可以关闭回气阀74。填装高度校正因此结束,并且阀74、76、78、80和82被关闭。
96.在校正了容器70的填装高度之后,对容器70进行卸载。对容器70的卸载在填装转盘14旋转期间在填装转盘14的填装站32的圆形路径的角部段e(见图1)中进行。
97.图8示出了卸载。在卸载时,设有节流点的卸载阀82打开预定的时间段。该时间段可以相对较短。在此,大量惰性气体经由气体通道68和卸载阀82从容器70流出到外部,直到在容器70中产生正常的大气压。
98.在容器70卸载之后,可以降低容器支撑件84,并且可以从填装头62取下被填装的容器70。在容器中液面以上的空闲空间/顶部空间仍然完全充满纯惰性气体。空气中的氧气不能作用于容器70中的液体。容器70现在可以被传送,而无需特殊的保护措施,例如旨在产生泡沫的高压喷射。
99.经填装的容器70从填装转盘14传送到出料输送机16。出料输送机16进一步按照需要运送经填装的容器70。经填装的容器70可以被运送到在封闭装置20(见图1)的封闭机构34(见图2、9和10)下方的容器支撑件86。如果发生少量的液体自动起泡,这不是问题,因为泡沫可以被容器70中的空闲空间吸纳。
100.图9和10示出了容器70的封闭。
101.图9示出了在处于其上端位置的封闭机构34下方的经填装的容器70。封闭机构34已经预先接纳了冠形软木塞92。
102.可以在容器70到达封闭机构34时切换阀98或已经事先切换阀98。经由管线46吹出的几乎纯净的惰性气体(例如co2)——空气浓度为例如2.5%或更少——从第一压力容器26被供应给吹嘴94,并在那里排出到外界。在此,在封闭机构34的下侧和容器口之间建立了包围冠形软木塞92的几乎纯净的惰性气体气氛。同时,可以特别是在冠形软木塞92的下侧去除空腔中的空气夹杂物,并且可以将容器口与正常空气环境分开。
103.惰性气体气氛可以至少维持一段时间,直至冠形软木塞94通过封闭机构34的降低沿着未示出的控制曲线等被放置到容器70上并且被包边,参见图10。然后可以再次切换阀98,如果希望的话。因此,即使在惰性气体气氛下随之完成封闭期间,容器70中的纯惰性气体也不会被空气污染,尤其是不会被在冠形软木塞92下侧的空气夹杂物污染。
104.在封闭之后,容器70因此仅包含液体和纯惰性气体(例如co2)。在此,如果如所述采用从第一压力容器26流出的几乎纯的惰性气体(空气浓度例如约为2.5%),则通常就足够了。就数量而言,这种惰性气体也很容易足够,因为为了将容器70预加载到例如大约6.8巴,在常压下需要多倍容器体积的惰性气体,所述惰性气体然后在填装时又从容器70中去除。来自第三压力容器30的惰性气体因此具有多种用途:建立背压、在进入容器70中时保护液体、保护第一压力容器26中的液体以及在封闭时建立惰性气体气氛。此外,用于吹嘴94的惰性气体仅需要相对较低的压力,因为不必将液体从容器70中压出。在极端质量要求的情况下,吹嘴94当然也可以直接由第三压力容器30予以供给,或通过惰性气体源56予以供给。也可以省去阀98,并将管线46直接与管线96连接。
105.在容器处理设备10的正常操作期间,在填装转盘14中会有一个或多个容器70可能爆裂。例如,容器70的已经存在的损坏(例如,细线裂纹、卡住等)可能导致容器70在预抽真空、预加载、填装或校正填装高度时爆裂。爆裂容器70的飞溅部分会损坏相邻填装站32中的其他容器70,进而导致它们爆裂。爆裂的容器70可至少暂时导致正常操作发生故障,因为在相关的一个或多个填装站32中不再存在容器70。于是,例如压差或校正压力可能下降,或者填装转盘14的其他流体参数(例如第一压力容器26的填装高度和/或充注压力)可能受到负面影响。这最终会导致剩余容器70的填装高度至少暂时地未被校正,或不再被充分校正。可能过填装的容器70被输送到封闭装置20。如果例如塞子或软木塞被压入过满容器70的充满液体的顶部空间中,则过满的容器70可能在封闭装置20中爆裂。
106.本公开的一个特殊性在于,提出了一种异常操作模式,通过该操作模式可以克服上述缺点。下面参考图1-10描述异常操作模式。
107.在容器处理设备10的正常操作期间,优选连续地监测填装转盘14的至少一个流体参数。流体参数经过选择,使得它允许推断出在正常操作期间在填装转盘14中的至少一个容器70的损坏(例如爆裂、破坏等)。用于填充容器70的充注压力、用于校正填装高度的校正压力和/或填装转盘14的第一压力容器26或液体罐的填装水平因此可以合乎目的地用作监测的流体参数。
108.如果控制单元24识别出至少一个监测的流体参数在正常操作模式期间呈现不允许的值,则可以切换到异常操作模式。当监测的流体参数的实际值低于预定的下限值时,可
以优选地识别出不允许的值。(下或上)限值可以例如在相对于被监测的流体参数的目标值的
±
10%至
±
50%的范围内。
109.在异常操作模式中,首先将填装转盘14的旋转暂停或停止。为了使填装转盘14能够尽可能快地停止,可以使用填装转盘14的单独的快速或紧急停止功能。在此,相比于填装转盘14的常规切断,例如在操作结束时,进行维护工作、转换工作等,填装转盘14可以更快地停止。
110.在填装转盘14暂停期间,优选仍然进行填装转盘14的所有工艺步骤(例如预抽真空、预加载、填装),乃至包括容器70的填充在内,优选针对相应的容器70相继地进行。
111.例如,填装转盘14中的那些在正常操作模式下尚未或尚未完全预抽真空的容器70可以被预抽真空。优选地,在填装转盘14的静止状态期间,在部段a(见图1)中的所有容器70(完全)被预抽真空。
112.那些在正常操作模式下还没有或者还没有完全地被预加载的容器70,可以被预加载。优选地,部段a和b(见图1)中的所有容器70在填装转盘14处于静止状态期间(完全)被预加载。
113.那些在正常操作模式下尚未完全填充的容器70,可以被填充,其填装高度在正常操作模式下尚未完全校正和/或达到填装转盘14的最大回风管角度。优选地,部段a、b和c(参见图1)中的所有容器70在填装转盘14处于静止状态期间(完全)被填充,必要时还填充在部段d和/或e中的容器70,如果需要的话。
114.当填装转盘14暂停期间,最初不再对容器70的填装高度进行校正,因为该校正由于破裂的容器70导致流体调节回路发生故障而无法工艺可靠地实现。替代地,起初等待,直到至少一个监测的流体参数例如通过超过下限值而又处于允许的值。根据故障的大小,流体调节回路需要不同长的时间来再次振荡稳定,从而使至少一个监测的流体参数再次处于允许的值。
115.当至少一个监测的流体参数已经再次处于允许的值时,将填装高度校正应用于容器70。优选地,在校正容器70的填装高度时,校正填装转盘14中的所有先前填充的容器70的填装高度,如果可达到的话。在此有益地,校正在填装转盘14的用于从进料输送机12接收容器70的接收部段与填装转盘14的最大回风管角度之间的所有容器70的填装高度。填装高度校正在此有益地从下游向上游进行,即特别是从填装转盘14的最大回风管角度开始。在异常操作模式中,填装高度校正因此不限于比如在正常操作模式下的部段d,而是尤其从d部段(必要时e部段)的末尾直至部段a的开头。
116.可行的是,为了校正在部段a、b、c(和可能的e)中的容器70的填装高度,在异常操作模式下,额外地使得各个填装站32的回气管64伸出,只要填装站32的配置需要这样。
117.在异常操作模式中校正了容器70的填装高度或至少已经校正部段d中(参见图1)的容器70的填装高度之后,可以又切换到正常操作模式。然后重新启动填装转盘14。在此根据控制单元24的配置而定,该切换可以例如完全自动地进行,或者在进行了手动确认之后进行。
118.然而,异常操作模式不仅能导致填装转盘14的适配操作。替代地或附加地,容器处理设备10的其他机构也可以在异常操作模式下与在正常操作模式下不同地操作。
119.例如,在异常操作模式下,出料输送机16可以与填装转盘14去耦(所谓的解除阻
塞)。在去耦时,例如填装转盘14的驱动器和出料输送器16的驱动器可以彼此去耦。由此可以防止当填装转盘14在异常操作模式下暂停并且出料输送机16要旋转时出现问题。在异常操作模式下,出料输送机16仍然可以被空转。出料输送机16优选仍继续旋转,至少直到它已经传送了所有容器70。
120.封闭装置20也可以在异常操作模式中至少在开始时继续运行。封闭装置20可以封闭由于出料输送机16空转而接收的容器70。
121.如果存在接线机构22,则在异常操作模式下由封闭装置20密封的容器70仍然可以在异常操作模式下由接线机构22接收和接线。
122.优选地,在异常操作模式中,附加地使得进料输送机12和在进料输送机12上游的至少一个机构18暂停。
123.要明确指出,关于出料输送机16(以及可能的封闭装置20和/或接线机构22)的异常操作模式独立于关于填装转盘14的异常运行模式公开。有益地,例如可以仅使得填装转盘14在异常操作模式下暂停,而出料输送机16(以及可能的封闭装置20和/或接线机构22)在异常操作模式下运行(例如去耦、空转、封闭和可能的接线),如上所述。另一方面,例如可以利用暂停、填充和校正填装高度(以及可能的先前的预抽真空和/或预加载)来实现关于填装转盘14的异常操作模式,并且出料输送机16(以及可能布置在其下游的机构)仅暂停。
124.本发明并不局限于上述优选的实施例。确切地说,可以有多种同样采用本发明的构思、因而落入保护范围内的改型和变型。本发明特别是也要求保护从属权利要求的主题和特征,而独立于所引用的权利要求。特别地,独立权利要求1的各个特征分别彼此独立地被公开。附加地,从属权利要求的特征也与独立权利要求1的全部特征相独立地公开。本文中的所有范围说明均应理解为已公开,从而落入相应范围内的所有值均单独公开,例如也作为相应范围的分别优选的较窄的外部界限。此处给出的以巴为单位的压力值应被视为优选值。其他压力值也可用于其他应用情况,优选采用此处为各个压力参数(例如充注压力、校正压力等)指定的近似关系。
125.附图标记列表
126.10 容器处理设备
127.12 进料输送机
128.14 填装转盘
129.16 出料输送机
130.18 机构
131.20 封闭装置
132.22 接线机构
133.24 控制单元
134.26 第一压力容器
135.28 第二压力容器
136.30 第三压力容器
137.32 填装站
138.34 封闭机构
139.36 管线
140.38 液体源
141.40 调节阀
142.42 调节器
143.44 填充探头
144.46 管线
145.48 调节阀
146.50 调节器
147.52 真空源
148.54 管线
149.56 惰性气体源
150.58 减压阀
151.60 压力调节器
152.62 填装头
153.64 回气管
154.66 液体管线
155.68 气体通道
156.70 容器
157.72 回气管线
158.74 回气阀
159.76 液体阀
160.78 真空阀
161.80 惰性气体阀
162.82 卸载阀
163.83 升降缸
164.84 容器支撑件
165.86 容器支撑件
166.88 封闭锥体
167.90 压紧器
168.92 冠形软木塞
169.94 吹嘴
170.96 供应管线
171.98 转换阀
172.100 连接管线
173.102 截止阀
174.104 清洗管线
175.106 截止阀
176.a 预抽真空
177.b 预加载
178.c 填充
179.d 校正填装高度
180.e 卸载。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。