1.本实用新型属于运输机械技术领域,尤其是涉及一种带有起重机功能的自动爬楼装置。
背景技术:
2.电动爬楼机主要分为载物爬楼机和载人爬楼机两大类。载物爬楼机常被用于物流搬运领域,可以帮助人们轻松的搬运重物上下楼。载人爬楼机适用于需要上下楼梯的残疾人和老年人,使其在没有合适的上下楼梯设备的建筑物楼梯上无障碍通行,现有的爬楼机很少应用于工程现场,且承重小,不具备起重功能,载重工器具上下车及翻越遮拦需要人工搬运,对工人的腰椎健康存在威胁。
技术实现要素:
3.有鉴于此,本实用新型旨在提出一种带有起重机功能的自动爬楼装置,以解决现有技术中的不足。
4.为达到上述目的,本实用新型的技术方案是这样实现的:
5.一种带有起重机功能的自动爬楼装置,包括载重工具、驱动机构和履带推动机构,所述载重工具上安装驱动机构,载重工具底部安装履带推动机构,且载重工具与履带推动机构铰接设置,所述驱动机构和履带推动机构均信号连接至控制器。
6.进一步的,还包括电源机构,所述驱动机构和履带推动机构均电连接至电源机构。
7.进一步的,所述载重工具包括载重本体、一号载物架、二号载物架、固定杆和把手,所述载重本体底部一侧与履带推动机构铰接设置,载重本体底部另一侧固定连接至一号载物架,二号载物架安装在一号载物架上方的载重本体上,固定杆转动安装在载重本体顶部,所述二号载物架、固定杆均与驱动机构相连接,驱动机构能驱动二号载物架在载重本体上滑动,载重本体顶部两端分别固定连接至把手。
8.进一步的,所述载重本体为长方形框架结构,载重本体底部两端分别设有一个万向轮,且载重本体两侧分别开设有一条滑槽,一号载物架的两端分别固定至两条滑槽内,固定杆的两端分别转动套接至两条滑槽内,二号载物架的两端分别与两条滑槽滑动连接。
9.进一步的,所述一号载物架、二号载物架均为l形结构。
10.进一步的,所述驱动机构包括波纹管、链条、链轮和驱动电机,所述波纹管一端固定连接至二号载物架中部,另一端固定连接至固定杆中部,链条的一端穿过波纹管固定连接至二号载物架中部,另一端与链轮铰接后连接至驱动电机的输出轴,其中,所述链轮固定套接至固定杆中部,所述驱动电机信号连接至控制器。
11.进一步的,所述控制器为plc,plc的型号为ipc-610l,驱动电机为伺服电机,驱动电机的型号为yrf60。
12.相对于现有技术,本实用新型所述的一种带有起重机功能的自动爬楼装置具有以下优势:
13.(1)本实用新型所述的一种带有起重机功能的自动爬楼装置,结构简单,设计合理,带有起重机功能,工程现场可实现载重工具的上下车及翻越门槛遮拦,避免人工搬运,通过驱动机构和履带推动机构自动爬楼,减轻人工搬运重物的压力,提升工程现场工作效率,易于推广。
附图说明
14.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
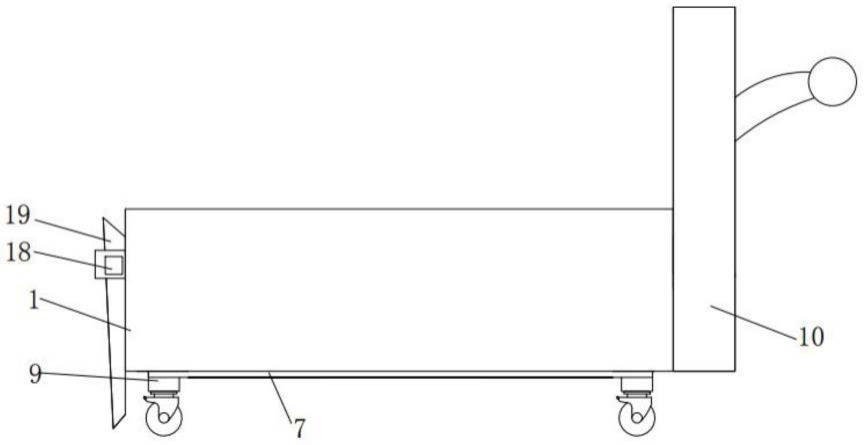
15.图1为本实用新型实施例所述的整体结构正视图;
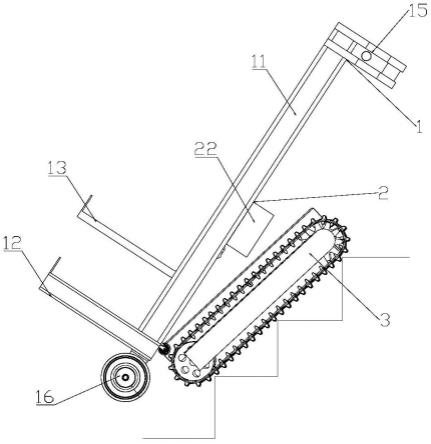
16.图2为本实用新型实施例所述的载重工具左视图。
17.附图标记说明:
18.1、载重工具;11、载重本体;12、一号载物架;13、二号载物架;14、固定杆;15、把手;16、万向轮;2、驱动机构;21、波纹管;22、驱动电机;3、履带推动机构。
具体实施方式
19.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
20.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
21.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
22.下面将参考附图并结合实施例来详细说明本实用新型。
23.实施例1
24.如图1至图2所示,一种带有起重机功能的自动爬楼装置,包括载重工具1、驱动机构2和履带推动机构3,所述载重工具1上安装驱动机构2,载重工具1底部安装履带推动机构3,且载重工具1与履带推动机构3铰接设置,所述驱动机构2和履带推动机构3均信号连接至控制器;在本实施例里,所述履带推动机构3采用现有产品,属于现有技术,载重工具1与履带推动机构3之间有一定自由度的转动,这样便于工作人员装卸货物。本带有起重机功能的自动爬楼装置,结构简单,设计合理,带有起重机功能,工程现场可实现载重工具的上下车
及翻越门槛遮拦,避免人工搬运,通过驱动机构和履带推动机构自动爬楼,减轻人工搬运重物的压力,提升工程现场工作效率,易于推广。
25.所述载重工具1包括载重本体11、一号载物架12、二号载物架13、固定杆14和把手15,所述载重本体11底部一侧与履带推动机构3铰接设置,载重本体11底部另一侧固定连接至一号载物架12,一号载物架12上方平行设有二号载物架13,二号载物架13滑动至载重本体11中部,载重本体11顶部中部转动套接至固定杆14,所述二号载物架13、固定杆14均与驱动机构2相连接,载重本体11顶部两端分别固定连接至把手15。在本实施例里,把手15便于工作人员推扶载重本体11,工作人员可以依据实际货物的尺寸调整一号载物架12、二号载物架13之间的间距,具体的,可以通过驱动机构2从而调整二号载物架13在载重本体11上的位置。
26.所述载重本体11为长方形框架结构,载重本体11底部两端分别设有一个万向轮16,且载重本体11内部两侧分别开设有一条滑槽,一号载物架12的两端分别固定至两条滑槽内,固定杆14的两端分别转动套接至两条滑槽内,二号载物架13的两端分别与两条滑槽滑动连接,在本实施例里,万向轮16可以用于工作人员推动本装置,节省人力,两条滑槽的横截面可以为长方形结构,在实际使用时,工作人员可以通过二号载物架13与两条滑槽滑动设置从而调节号载物架12、二号载物架13之间的间距。
27.所述一号载物架12、二号载物架13均为l形结构。l形结构的设置便于一号载物架12、二号载物架13将货物卡住,避免货物脱落。
28.所述驱动机构2包括波纹管21、链条、链轮和驱动电机22,所述波纹管21一端固定连接至二号载物架13中部,另一端固定连接至固定杆14中部,链条的一端穿过波纹管21固定连接至二号载物架13中部,另一端与链轮铰接后连接至驱动电机的输出轴,所述链轮固定套接在固定杆14中部,所述驱动电机22信号连接至控制器,在本实施例里,波纹管21可以收缩,也可与保护链条、链轮,驱动电机22外部套接一个保护壳,从而可以保护驱动电机22,驱动电机22输出轴可以固定连接一个链条的收纳轴,收纳轴与链条的一端固定连接,当需要调节一号载物架12、二号载物架13之间的间距时,工作人员启动驱动电机22,驱动电机22输出轴转动带动输出轴上的收纳轴转动,收纳轴转动从而拉动链条绕着收纳轴缠绕,或者放线,链条拉动从而链轮转动,进而拉动二号载物架13移动,从而达到调节一号载物架12、二号载物架13之间间距的目的。
29.还包括电源机构,所述驱动机构2和履带推动机构3均电连接至电源机构,在本实施例里,电源机构可以为蓄电池,这样电源机构便可以为驱动机构2和履带推动机构3提供电量。
30.所述控制器为plc,plc的型号为ipc-610l,驱动电机为伺服电机,驱动电机的型号为yrf60。在实际使用时,控制器外部设有触摸屏,触摸屏的型号为zb00000003,工作人员通过有触摸屏控制控制器进行操作。
31.实施例2
32.本实用新型实施例提供的带有起重机功能的自动上下楼装置,包括载重工具1、驱动机构2和履带推动机构3,履带推动机构3的长度应略大于变电站常规台阶的三节,由大功率蓄电池作为动力输出。装置手把上配置“重物上升”、“重物下降”上楼、下楼、速度调节、停止等按钮,实现装置起重、爬楼、停驻等功能的操控。安装两层的载物架,对承重有一定要
求,实现“叉车”的功能。两层载物架的极限高度应略大于皮卡车后备箱的高度,便于重物的上下车。在载物架的低端安装两个可转向的滚轮,便于工作人员在平地上拉动本装置。
33.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。