1.本实用新型涉及机器人技术领域,尤其涉及一种轨道机器人的行走机构。
背景技术:
2.随着科技的进步,机器人的应用越来越广泛,在工业焊接工作中,有些机器人已经替代了人工,对于一些较大的焊件,焊接机器人就需要使用轨道,使机器人移动焊接。
3.然而,传统的机器人轨道有多种,有的是圆轨,有的是工字型轨道,有的是齿轨,机器人在齿轨上行走较为稳定,但是,目前很多齿规多采用齿轮齿条配合,齿条多为水平设置,当有异物落到齿条上,如不及时清楚掉机器人的行走机构可能会轧在异物上,如果异物较为坚硬,可能会造成行走齿轮的损坏。
4.因此,有必要提供一种轨道机器人的行走机构解决上述技术问题。
技术实现要素:
5.本实用新型解决的技术问题是提供一种轨道机器人的行走机构能够将齿条设置成倾斜状态,使落在齿条上的异物能够沿齿条的倾斜方向落下,避免异物留在齿条上,而造成齿条和行走齿轮的损坏,保护了齿条和行走齿轮。
6.为解决上述技术问题,本实用新型提供的轨道机器人的行走机构,包括:底板,所述底板上设置有两个轨道,两个所述轨道上均设置有倾斜设置的齿条,所述底板的上方设置有底座,所述底座的两侧均设置有两个行走齿轮,四个所述行走齿轮分别与相应的齿条啮合,四个行走齿轮转动能够带动底座移动。
7.优选的,所述底座上设置有驱动组件,所述驱动组件包括电机,所述底座内设置有与电机连接的转轴,所述转轴上安装有驱动齿轮,所述底座内转动设置有两个蜗杆,两个所述蜗杆上均安装有传动齿轮,两个所述传动齿轮啮合,所述驱动齿轮与相应的传动齿轮啮合,所述底座上转动设置有四个传动杆,四个所述传动杆分别与相应的行走齿轮连接,所述传动杆远离所述行走齿轮的一端安装有蜗轮,四个所述蜗轮与相应的蜗杆啮合。
8.优选的,所述底板上设置有导轨组件,所述导轨组件用于固定底座,所述导轨组件包括安装在底板上的t形块,所述t形块上设置有移动块,所述移动块上开设有t形槽,所述t形槽套设在所述t形块上。
9.优选的,所述t形槽顶部、两侧和底部分别安装有多个第一滚轮、第二滚轮和第三滚轮,所述第一滚轮、第二滚轮和第三滚轮均与t形块接触。
10.优选的,所述底座上安装有上堵塞和下堵塞。
11.优选的,所述底座的两侧均安装有护罩。
12.优选的,所述底板的一侧安装有电缆槽。
13.优选的,所述底座上设置有观察窗。
14.与相关技术相比较,本实用新型提供的轨道机器人的行走机构具有如下有益效果:
15.(1)、本装置通过将齿条设置成倾斜状态,使落在齿条上的异物能够沿齿条的倾斜方向落下,避免异物留在齿条上,而造成齿条和行走齿轮的损坏,保护了齿条和行走齿轮。
16.(2)、本装置中的驱动组件,能够使行走齿轮适应倾斜的齿条,使底座4能够稳定在齿条上运行。
17.(3)、本装置中的导轨组件,使底座不会发生上下左右移动,能够使其稳定的移动在齿条上。
附图说明
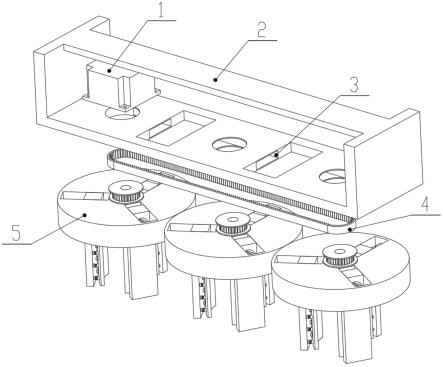
18.图1为本实用新型提供的轨道机器人的行走机构的结构示意图;
19.图2为图1所示的轨道机器人的行走机构的内部结构示意图;
20.图3为图2中a部分的放大图;
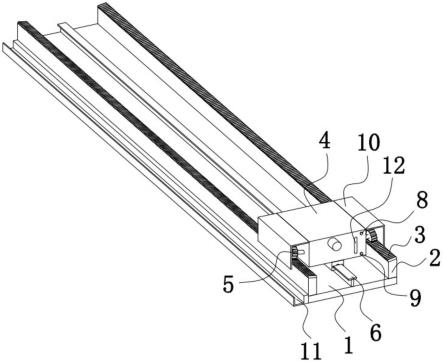
21.图4为图1所示的轨道机器人的行走机构的前视图;
22.图5为图4中b部分的放大图。
23.图中标号:1、底板,2、轨道,3、齿条,4、底座,41、电机,42、转轴,43、驱动齿轮,44、蜗杆,45、传动齿轮,46、传动杆,47、蜗轮,5、行走齿轮,6、t形块,7、移动块,71、第一滚轮,72、第二滚轮,73、第三滚轮,8、上堵塞,9、下堵塞,10、护罩,11、电缆槽,12、观察窗。
具体实施方式
24.下面结合附图和实施方式对本实用新型作进一步说明。
25.实施例1
26.如图1-5所示,一种轨道机器人的行走机构,包括:底板1,所述底板1上设置有两个轨道2,两个所述轨道2上均设置有倾斜设置的齿条3,所述底板1的上方设置有底座4,所述底座4上能够安装机器人,所述底座4的两侧均设置有两个行走齿轮5,四个所述行走齿轮5分别与相应的齿条3啮合,四个行走齿轮5转动能够带动底座4移动,由于齿条3倾斜设置,当一些异物落到齿条3上时,由于齿条3是倾斜设置的,使得异物会沿着齿条3滑落,从而避免行走齿轮5轧到异物上造成齿条3或行走齿轮5的损坏。
27.实施例2
28.如图2-3所示,所述底座4上设置有驱动组件,所述驱动组件包括安装在底座4一侧的电机41,所述底座4内设置有与电机41连接的转轴42,所述转轴2上安装有驱动齿轮43,所述底座4内转动设置有两个蜗杆44,两个所述蜗杆44上均安装有传动齿轮45,两个所述传动齿轮45啮合,所述驱动齿轮43与相应的传动齿轮45啮合,所述底座4上转动设置有四个传动杆46,四个所述传动杆46分别与相应的行走齿轮5连接,所述传动杆46远离所述行走齿轮5的一端安装有蜗轮47,四个所述蜗轮47与相应的蜗杆啮合,通过启动电机41,可使转轴42转动,转轴42转动带动驱动齿轮43转动,驱动齿轮43使两个传动齿轮45转动,传动齿轮45转动带动蜗轮47转动,蜗轮47通过传动杆46带动行走齿轮5转动,进而实现底座4在倾斜的齿条3上行走,同时,四个行走齿轮5受到一个电机41的控制,简化了驱动控制系统,相比与传统的多个电机驱动,无需在使用编码器等设备,且采用蜗轮蜗杆传动,使底座4停止后,能够更加稳定,因为蜗轮蜗杆传动具有锁止作用,当电机41停止后,底座4会停止,不会轻易发生移动,进而使机器人能够稳定停止。
29.实施例3
30.如图4-5所示,所述底板1上设置有导轨组件,所述导轨组件用于固定底座4,使底座4不会发生上下左右移动,能够使其稳定的移动在齿条3上,所述导轨组件包括安装在底板1上的t形块6,所述t形块6上设置有移动块7,所述移动块7上开设有t形槽,所述t形槽套设在所述t形块6上。
31.进一步的,所述t形槽顶部、两侧和底部分别安装有多个第一滚轮71、第二滚轮72和第三滚轮73,所述第一滚轮71、第二滚轮72和第三滚轮73均与t形块6接触,通过设置第一滚轮71、第二滚轮72和第三滚轮73,能够减小t形槽与t形块6之间的摩擦,延长t形块6和移动块7的使用寿命。
32.实施例4
33.如图1所示,所述底座4上安装有上堵塞8和下堵塞9,将上堵塞8拆除,可向底座4内倒入润滑油,将下堵塞9拆除,可放出底座4内的润滑油。
34.实施例5
35.如图1所示,所述底座4的两侧均安装有护罩10,两个所述护罩10对行走齿轮5起到一定的保护作用。
36.实施例6
37.如图1所示,所述底板1的一侧安装有电缆槽11,电缆槽11内用于放置机器人电缆。
38.实施例7
39.如图1所示,所述底座1上设置有观察窗12,通过观察窗12可观察底座4内的润滑油的量。
40.本实用新型提供的轨道机器人的行走机构的工作原理如下:
41.当有异物落到齿条3上时,会沿着齿条3的倾斜方向落下,从而保护齿条3与行走齿轮5;
42.当底座4行走时,启动电机41,使转轴42转动,转轴42通过驱动齿轮43使两个传动齿轮45转动,从而使蜗杆44转动,蜗杆44通过蜗轮47带动传动杆46转动,从而使行走齿轮5转动,进而使底座4移动。
43.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。