1.本技术涉及仓储物流技术领域,具体涉及一种自动搬运接驳系统。
背景技术:
2.目前,在仓储物流行业中,料箱通常采用搬运机器人至输送线,通过输送线将料箱输送到预设卸货位,再通过码垛机器人码垛摆放搬运并码垛,搬运机器人和码垛机器人都是通过夹取料箱的方式夹取料箱,并且,搬运机器人和码垛机器人每次仅能夹取一个料箱。一方面,对料箱的材质要求交高,料箱变形量应很小。另一方面,搬运、码垛效率低。
技术实现要素:
3.本技术提供一种自动搬运接驳系统,以避免夹取料箱,对料箱材质要求低。本技术提供一种自动搬运接驳系统,包括:
4.载货架,所述载货架具有载货层,所述载货层设有载货部,所述载货部具有至少两个载货位,所述载货位用于承载货物;所述载货部开设有镂空避让部;
5.输送装置,包括:支架和输送组件,所述输送组件设于所述支架,所述输送组件具有用于与所述载货架对接、以承接货物的接货位,所述输送组件用于将货物从接货位输送至卸货位;
6.移动装置,所述移动装置包括:移动机构和升降机构,所述升降机构安装于所述移动机构,所述载货架支撑于所述升降机构,所述升降机构用于驱动所述载货架在第一预设高度和第二预设高度之间往复升降;在所述第一预设高度,所述载货层的高度高于所述输送组件的高度;在所述第二预设高度,所述载货层的高度低于所述输送组件的高度;所述移动机构用于驱动所述载货架在取货位与接货位之间往复移动;在所述取货位,所述载货部取货;在所述接货位,所述载货架处于所述第二预设高度,以使所述输送组件避让在所述镂空避让部,所述输送组件承接所述载货部的货物。
7.一种实施例中,所述载货层设有两个载货部,所述移动机构还用于驱动所述载货架从一所述载货部切换至另一所述载货部。
8.一种实施例中,所述移动装置还包括:接货到位检测机构,所述接货到位检测机构与所述移动机构连接,所述接货到位检测机构用于检测处于接货位的所述载货架中的避让镂空部是否正对于所述输送组件,并在检测到镂空避让部正对于所述输送组件时,控制所述移动机构停止移动。
9.一种实施例中,所述输送装置还包括:避让到位检测机构,所述避让到位检测机构与所述输送组件连接,所述避让到位检测机构用于检测所述输送组件是否避让在所述镂空避让部,并在检测到所述输送组件避让在所述镂空避让部时,控制所述输送组件工作。
10.一种实施例中,所述输送组件包括:至少两个输送线体,所述至少两个输送线体间隔设置,且可同步运动;所述输送线体沿接货位至卸货位的方向设置;所述载货部上形成有至少两个镂空避让部,在所述接货位,所述至少两个输送线体分别避让在所述至少两个镂
空避让部。
11.一种实施例中,所述输送组件包括:多个输送滚筒,所述多个输送滚筒沿所述接货位至卸货位的方向依次间隔设置,且所述输送滚筒垂直于自所述接货位至卸货位延伸的方向;所述载货部形成有多个镂空避让部,在所述接货位,位于所述接货位的部分所述输送滚筒分别避让在所述多个镂空避让部。
12.一种实施例中,所述载货层包括:多个载货件,所述载货件为杆状或板状载货件,所述多个载货件相互平行且依次间隔设置,相邻两个所述载货件之间形成所述镂空避让部。
13.一种实施例中,所述载货架上还设置有支撑组件,所述载货层、所述支撑组件沿所述载货架的高度方向自上而下依次设置;所述支撑组件支撑于所述升降机构。
14.一种实施例中,所述支撑组件包括:多个支撑件,所述多个支撑件设于所述载货架。
15.一种实施例中,部分所述输送组件相对于所述支架悬空,所述接货位设于悬空的所述部分所述输送组件。
16.依据上述实施例的自动搬运接驳系统,移动机构将载货架移动至位于接货位的输送组件的上方,升降机构驱动载货架升降至第二预设高度,以使输送组件避让在镂空避让部,从而输送组件能够托住货物,输送组件承接载货部上的货物,并将货物由接货位输送至卸货位,相较于以往采用搬运机器人夹取搬运的方式,能够保证货物不被损坏,同时,每次通过载货架可向输送组件输送至少两个货物,可有效提高搬运效率。
附图说明
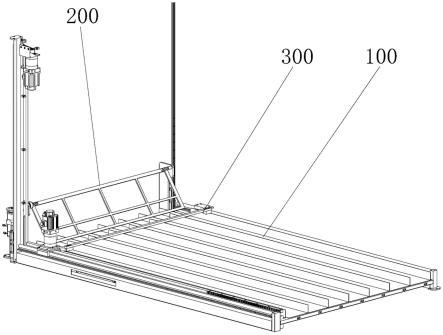
17.图1为本技术提供的自动搬运接驳系统的侧视图;
18.图2为本技术提供的自动搬运接驳系统的俯视图;
19.图3为本技术提供的自动搬运接驳系统中移动机构的结构示意图;
20.图4为本技术提供的自动搬运接驳系统中载货架的俯视图;
21.图5为本技术提供的自动搬运接驳系统第一次向接货位搬运的示意图一;
22.图6为本技术提供的自动搬运接驳系统第一次向接货位搬运的示意图二;
23.图7为本技术提供的自动搬运接驳系统第一次搬运至接货位的示意图一;
24.图8为本技术提供的自动搬运接驳系统第一次搬运至接货位的示意图二;
25.图9为本技术提供的自动搬运接驳系统第一次向取货位移动的示意图一;
26.图10为本技术提供的自动搬运接驳系统第一次向取货位移动的示意图二;
27.图11为本技术提供的自动搬运接驳系统第二次向接货位搬运的示意图一;
28.图12为本技术提供的自动搬运接驳系统第二次向接货位搬运的示意图二;
29.图13为本技术提供的自动搬运接驳系统第二次搬运至接货位的示意图一;
30.图14为本技术提供的自动搬运接驳系统第二次搬运至接货位的示意图二;
31.图15为本技术提供的自动搬运接驳系统第二次向取货位移动的示意图一;
32.图16为本技术提供的自动搬运接驳系统第二次向取货位移动的示意图二。
具体实施方式
33.下面通过具体实施方式结合附图对本技术作进一步详细说明。其中不同实施方式中类似元件采用了相关联的类似的元件标号。在以下的实施方式中,很多细节描述是为了使得本技术能被更好的理解。然而,本领域技术人员可以毫不费力的认识到,其中部分特征在不同情况下是可以省略的,或者可以由其他元件、材料、方法所替代。在某些情况下,本技术相关的一些操作并没有在说明书中显示或者描述,这是为了避免本技术的核心部分被过多的描述所淹没,而对于本领域技术人员而言,详细描述这些相关操作并不是必要的,他们根据说明书中的描述以及本领域的一般技术知识即可完整了解相关操作。
34.另外,说明书中所描述的特点、操作或者特征可以以任意适当的方式结合形成各种实施方式,各实施例所涉及的操作步骤也可以按照本领域技术人员所能显而易见的方式进行顺序调换或调整。因此,说明书和附图只是为了清楚描述某一个实施例,并不意味着是必须的组成和/或顺序。
35.本文中为部件所编序号本身,例如“第一”、“第二”等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所说“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。
36.本技术提供了一种自动搬运接驳系统,应用于诸如图书分拣、快递分拣等需要分拣物品的仓储物流领域,货物为装有图书或快递等待分拣物品的货箱。移动装置将承载有货物的载货架移动至输送组件的接货位,之后,升降机构下降使得移送组件避让在载货架的镂空避让位,此时,移送组件的高度高于载货层的高度,使得移送组件能够托住货物,移送组件将货物从接货位输送至卸货位。如此,整个搬运接驳过程无需采用机器人夹取的方式,不易损坏货物(货箱),且对货箱的材质要求较低,例如,可采用纸质货箱。
37.参见图1-图4所示,本实施例所提供的自动搬运接驳系统包括:载货架10,输送装置20,以及移动装置30。
38.载货架10具有载货层11,如图2和图4所示,载货层11设有载货部111,载货部11具有至少两个载货位c,载货位c用于承载货物100,也就是说,一个载货层11的载货部111可承载至少两个货物100。图4中,载货位c的位置与货物100的位置重合。在载货部111上开设有镂空避让部112,该镂空避让部112贯穿载货层11,并且,镂空避让部112在同一载货部111延伸至各载货位c。本实施例中,载货部111具有两个载货位c。当然,载货位c的数量也可根据实际需要进行设定,例如,还可以在载货部111设置三个载货位c、或者四个载货位c等。
39.输送装置20包括:支架21和输送组件22,输送组件22设于支架21,从而,支架21对输送组件22进行支撑。如图2所示,输送组件22具有接货位r和卸货位u,接货位r用于与载货架10对接、以承接载货部111所承载的货物100。当输送组件22从载货架10承接货物100之后,输送组件22将货物100从接货位r输送至卸货位u,其中,卸货位u为将货物100搬运的最终位置。
40.可以理解的是,输送组件22对接至卸货位u,例如,当应用于图书分拣领域时,该卸货位u可以是用于储放图书的仓库(或者立体书库);当应用于快递分拣领域时,该卸货位u可以是储放快递的仓库,或者,快递运输车辆。
41.当然,一些实施例中,该卸货位u也可仅用于缓存货物100,通过在卸货位u设置其他输送组件将货物100输送至最终位置。
42.如图1和图3所示,移动装置30包括:移动机构31和升降机构32,升降机构32安装于移动机构33,即,升降机构32可随移动机构31的移动而移动,载货架10支撑于升降机构32,如图5-图16所示,升降机构32用于驱动载货架10在第一预设高度h1和第二预设高度h2之间往复升降。载货架10处于第一预设高度h1和第二预设高度h2是指从载货架10的最顶点至地面的垂直高度,本实施例中,载货层11设置在载货架10的顶层,第一预设高度h1和第二预设高度h2即为载货层11的最顶点至地面的垂直高度,而载货层11的顶面优选为平面或处于平行于平面的状态,因此,第一预设高度h1和第二预设高度h2即为载货层11的顶面与地面的垂直高度。当升降机构32驱动载货架10升降至第一预设高度h1,载货层11的高度高于输送组件22的高度h,也就是说,第一预设高度h1的高度值大于输送组件22的高度h的高度值。当升降机构32驱动载货架10升降至第二预设高度h2,载货层11的高度底于输送组件22的高度h,也就是说,第二预设高度h2的高度值小于输送组件22的高度h的高度值。同样的,输送组件22的高度h是指输送组件22的最顶点至地面的垂直高度。
43.本实施例中,移动机构31用于驱动载货架10在取货位p与接货位r之间往复移动。在取货位p,通过人工或其他方式将货物100装载在载货部11的载货位c处,载货部11完成取货,当然,其他方式不损坏货物。在接货位r,载货架10处于第二预设高度h2,以输送组件22避让在镂空避让部112,此时,输送组件22的高度h高于载货架10中载货层11的高度(第二预设高度h2),输送组件22能够托住货物100,该输送组件22承接载货部111的货物,即将承接载货部111的所有货物、以接驳货物,之后,输送组件22将货物从接货位r输送至卸货位u、以搬运货物,从而将货物输送到需将货物搬运的终止位置。由于镂空避让部112延伸至载货部11的各载货位c,输送组件22能够托住载货部111上的所有货物,以承接载货部111的所有货物,相较于以往采用搬运机器人一个一个搬运货物的方式,可有效提高搬运效率。
44.本实施例中,整个接驳、搬运货物的过程,无需机器人夹取,保证货物不被损坏。
45.需要说明的是,当输送组件22避让在镂空避让部112时,载货层11整个的高度都低于输送组件22的高度h,不会阻碍货物从接货位r至卸货位u的输送。
46.采用将输送组件22安装在支架21上的方式,可使部分输送组件22相对于支架21悬空,悬空的部分输送组件22的下方形成有利于移动机构31移动的避让空间,使得移动机构31可移动到部分输送组件22的下方,而接货位r设于悬空的部分输送组件22。
47.当然,在其他实施例中,也可不设置输送组件22,使移动至接货位r的载货架10横跨在输送组件22的上方。该情况下,在保证载货架10载货后的强度的前提下,移动机构31可不移动至输送组件22的下方。
48.上述实施方式中,移动机构31驱动载货架10移动至接货位r时,载货层11处于第二预设高度h2,再由升降机构32驱动载货架10升降至第一预设高度h1,使得输送组件22避让在镂空避让部112。而移动机构31驱动载货架10从接货位r移出、从接货位r移动至取货位p的过程、移动至取货位p、从取货位p移动至靠近接货位r的位置(而未位于接货位r时),载货层11的高度可以处于第一预设高度h1或者第二预设高度h2,只需保证载货架10移动至接货位p时,保持载货层11处于第二预设高度h2即可。
49.本实施例中,如图2和图4所示,载货层11设有两个载货部111,两个载货部111的结构相同。移动机构31还用于驱动载货架10从一载货部111切换至另一载货部111。
50.需要说明的是,移动机构31驱动载货架10移动至接货位r时,保证其中一载货部
111位于接货位r。当输送组件22将该载货部111上的所有货物都输送至卸货位u或者输送至卸货位u的过程中,移动机构31驱动载货架10从已卸货的载货部111切换至未卸货的载货部111,如此,以提高效率。
51.当然,移动机构31驱动载货架10从一载货部111切换至另一载货部111的过程也可以是在取货位p进行,如此,还能够向已卸货的载货部111补充新的货物。
52.本实施例中,载货层11上所设置的两个载货部111并排设置,且载货部111上的各载货位c一字排开,以图4所示为例,两个载货部111中一字排开的各载货位c沿横向方向设置,两个并排设置的载货部沿纵向方向设置。换言之,移动机构31驱动载货架10从取货位p移动至接货位r的过程是沿横向方向,而为了保证从一载货部111切换至另一载货部111,移动机构31需原地进行转向,以沿纵向方向进行移动。如此,本移动装置30还可包括:旋转机构,该旋转机构安装在移动机构31上,前述的升降机构安装在旋转机构上,在移动机构驱动载货架10从一载货部111切换至另一载货部111的过程中,旋转机构能够驱动移动机构31原地转向至纵向方向,在转向过程中,升降机构32不随旋转机构的转动而转动。
53.移动装置30优选采用潜伏式agv(automated guided vehicle),潜伏式agv能够通过程序设定相应的移动路径,以在取货位p与接货位r之间往复移动,或者移动将载货架10从一载货部111切换至另一载货部111的移动路径。如图1和图3所示,该潜伏式agv的底侧中部设置有驱动轮311,为潜伏式agv的移动提供动力,在驱动轮311的两侧分别设置前从动轮312和后从动轮313,前从动轮312和后从动轮313都为万向轮,一方面,可对潜伏式agv形成支撑,另一方面,有利于潜伏式agv的转向。
54.在一实施例中,移动装置30还包括:接货到位检测机构(图中未示出),接货到位检测机构与移动机构31连接,接货到位检测机构用于检测处于接货位r的载货架10中的避让镂空部111是否正对于输送组件22,并在检测到镂空避让部112正对于输送组件22时,控制移动机构31停止移动。此时,升降机构驱动载货架10处于第二预设高度h2,以使输送组件22能够避让在镂空避让部112,通过接货到位检测机构的设置,有利于输送组件22的准确避让。
55.输送装置20还包括:避让到位检测机构(图中未示出),避让到位检测机构与输送组件22连接,避让到位检测机构用于检测输送组件22是否避让在镂空避让部112,并在检测到输送组件22避让在镂空避让部112时,控制输送组件22工作,从而将货物从接货位r输送至卸货位u。
56.在一实施例中,输送组件22包括:至少两个输送线体,各输送线体之间间隔设置,且可同步运动。该输送线体可以是传送带、传送链等采用循环式传送方式的输送组件,输送线体沿接货位r至卸货位u的方向设置。一种实施方式中,接货位r至卸货位u的方向为直线方向,如此,输送线体沿接货位r至卸货位u的直线方向移送货物。在载货部111上形成有至少两个镂空避让部112,从而,至少在当载货层11位于接货位r的上方时,镂空避让部112的长度应为沿接货位r至卸货位u的直线方向。在接货位r,各输送线体分别避让在各镂空避让部112。同样,采用输送线体输送时,载货层11同样影响货物由接货位r至卸货位r的输送。
57.本实施例中,如图1和图2所示,输送组件22包括:多个输送滚筒221,各输送滚筒221沿接货位r至卸货位u的方向依次间隔设置,且各输送滚筒221均垂直于自接货位r至卸货位u延伸的方向。换言之,接货位r至卸货位u的延伸方向为横向方向,则输送滚筒221的长
度方向为纵向方向。在载货部11形成有多个镂空避让部111,镂空避让部111的长度方向相应的液位纵向方向,在接货位r,位于接货位r的部分输送滚筒221分别避让在各镂空避让部111。
58.上述实施方式中,载货层11包括:多个载货件113,各载货件113为杆状或板状载货件,各载货件113相互平行且依次间隔设置,相邻两个载货件113之间形成镂空避让部112。
59.如图1所示,在载货架10上还设置有支撑组件13,载货层11、支撑组件13沿载货架10的高度方向自上而下依次设置。支撑组件13支撑于升降机构32,从而将载货架10支撑在移动机构31上。支撑组件13能够与升降机构32之间固定连接,支撑组件13的设置能够保证移动机构31在移动的过程中,避免货物因关系而晃动造成掉落的问题,有效提高移动装置30的安全性。
60.在一实施例中,支撑组件13包括:多个支撑件(图中未示出),各支撑件设于载货架10。可以认为各支撑件相较于同一点,该点支撑于升降机构,并且,该点为支撑件的中点,从而保证支撑在升降机构32上的稳定性。
61.本技术所提供的自动搬运接驳系统的工作过程如下:
62.参见图5和图6所示,第一次向接货位搬运,移动机构31驱动载货架10从取货位p向接货位r移动,在取货位p,载货架10两侧的载货部111上的各载货位c均装载有货物100。在载货架10从取货位p向接货位r移动、且在载货架10的载货层11进入到输送组件22的上方之前,载货层11可处于第一预设高度h1或者第二预设高度h2,本实施例中,载货层11处于第一预设高度h1。
63.参见图7和图8所示,第一次搬运至接货位,移动机构31驱动载货架10在进入到位于接货位r的部分输送组件22上方的过程中,升降机构32首先驱动载货架10升降至第一预设高度h1,并保持输送组件22正对于镂空避让部111,之后,升降机构32驱动载货架10升降至第二预设高度h2,使得输送组件22能够托住一侧载货部11上的所有货物,输送组件22再驱动货物由接货位r向卸货位u的方向移动。
64.参见图9和图10所示,第一次向取货位移动,在输送组件22再驱动货物由接货位r向卸货位u的方向移动的过程中,移动机构31驱动载货架10向取货位p的方向移动。之后,移动机构31驱动载货架10移动以将未卸货的载货部11切换到已卸货的载货部11的位置处。该过程中,可在取货位p处向已卸货的载货部11装载货物。
65.参见图11和图12所示,第二次向接货位搬运,移动机构31驱动载货架10从取货位p向接货位r移动,不同于第一次向接货位搬运,本次是将未卸货的载货部111移动至位于接货位r的输送组件22的上方。在取货位p,载货架10未卸货和已卸货的载货部111上的各载货位c均装载有货物100。同样的。在载货架10从取货位p向接货位r移动、且在载货架10的载货层11进入到输送组件22的上方之前,载货层11可处于第一预设高度h1或者第二预设高度h2,本实施例中,载货层11处于第一预设高度h1。
66.参见图13和图14所示,第二次搬运至接货位,移动机构31驱动载货架10在进入到位于接货位r的部分输送组件22上方的过程中,升降机构32首先驱动载货架10升降至第一预设高度h1,并保持输送组件22正对于未卸货的载货部111的镂空避让部111,之后,升降机构32驱动载货架10升降至第二预设高度h2,使得输送组件22能够托住未卸货的载货部11上的所有货物,输送组件22再驱动货物由接货位r向卸货位u的方向移动。
67.参见图15和图16所示,第二次向取货位移动,在输送组件22再驱动货物由接货位r向卸货位u的方向移动的过程中,移动机构31驱动载货架10向取货位p的方向移动。之后,移动机构31驱动载货架10移动以将未卸货的载货部11切换到已卸货的载货部11的位置处。该过程中,可在取货位p处向已卸货的载货部11装载货物。
68.重复上述步骤,从而可将货物依次的搬运到输送组件,并由输送组件输送至卸货位。
69.本实施例中,未卸货的装载部是相对于第一次已卸货的装载部而言。
70.综上所述,本技术所提供的自动搬运接驳系统中,移动机构将载货架移动至位于接货位的输送组件的上方,升降机构驱动载货架升降至第二预设高度,以使输送组件避让在镂空避让部,从而输送组件能够托住货物,输送组件承接载货部上的货物,并将货物由接货位输送至卸货位,相较于以往采用搬运机器人夹取搬运的方式,能够保证货物不被损坏,同时,每次通过载货架可向输送组件输送至少两个货物,可有效提高搬运效率。
71.以上应用了具体个例对本实用新型进行阐述,只是用于帮助理解本实用新型,并不用以限制本实用新型。对于本实用新型所属技术领域的技术人员,依据本实用新型的思想,还可以做出若干简单推演、变形或替换。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。