1.本实用新型涉及一种主动牵引式系留无人机回收装置,属于系留无人机技术领域。
背景技术:
2.目前,系留无人机应用日益广泛,但控制方式仍旧延续无人机的控制方式,采用专用遥控器或地面站控制。相对于通用无人机,系留无人机应用场景单一,大多数情况下仅需垂直起降,控制需求简单,只需控制起飞、降落,其控制功能无需繁琐的遥控器或地面站。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种一种主动牵引式系留无人机回收装置,解决了目前系留无人机的回收过程中,需采用专业遥控器或地面站控制系统,需要专业飞手控制的问题。
4.为解决以上问题,本实用新型的具体技术方案如下:一种主动牵引式系留无人机装置,其特征在于:包括牵引器外壳,牵引器外壳为中空结构,牵引器外壳内部设置有缓冲结构和拉力传感器,拉力传感器用于检测牵引拉杆对系留无人机整体的拉力,牵引拉杆依次贯穿缓冲结构、拉力传感器和牵引器外壳的底部,牵引拉杆的端部设置有连接结构。
5.所述的连接结构为环状结构,环状结构用于与系留线缆固定连接。
6.所述的缓冲结构包括第一缓冲器和第二缓冲器,第一缓冲器位于牵引拉杆的上方,第二缓冲器位于牵引拉杆的下方。
7.所述的第一缓冲器和第二缓冲器均采用聚氨酯材料制成。
8.所述的牵引拉杆为t形结构,水平段位于牵引器外壳的内部,位于第一缓冲器和第二缓冲器之间。
9.所述第一缓冲器采用聚氨酯材料,用来缓冲拉力传感器与牵引器外壳顶部的直接碰撞,起到保护牵引器的作用。
10.所述牵引拉杆用来压迫第二缓冲器生成对拉力传感器的正压力。
11.所述第二缓冲器采用聚氨酯材料,用来缓冲牵引拉杆与拉力传感器之间的直接碰撞,避免损坏拉力传感器。
12.所述拉力传感器用来检测牵引拉杆对系留无人机整体的拉力。
13.本实用新型带来的有益效果为:提供了一种主动牵引控制系留无人机装置,一端与无人机连接,另一端与系留线连接,系留线的另一端连接有地面控制箱,控制地面控制箱的开关,进而控制本装置下降,进而实现系留无人机的一键回收,使系留无人机起降过程控制更加简单,无需专业人员与专业遥控设备,采用有线控制,更加可靠。
附图说明
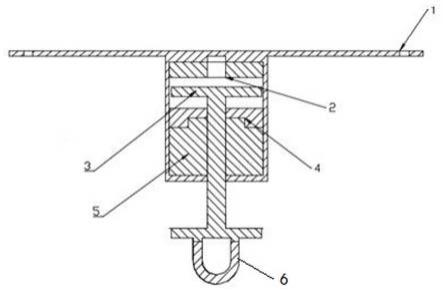
14.图1为主动牵引式系留无人机装置结构示意图。
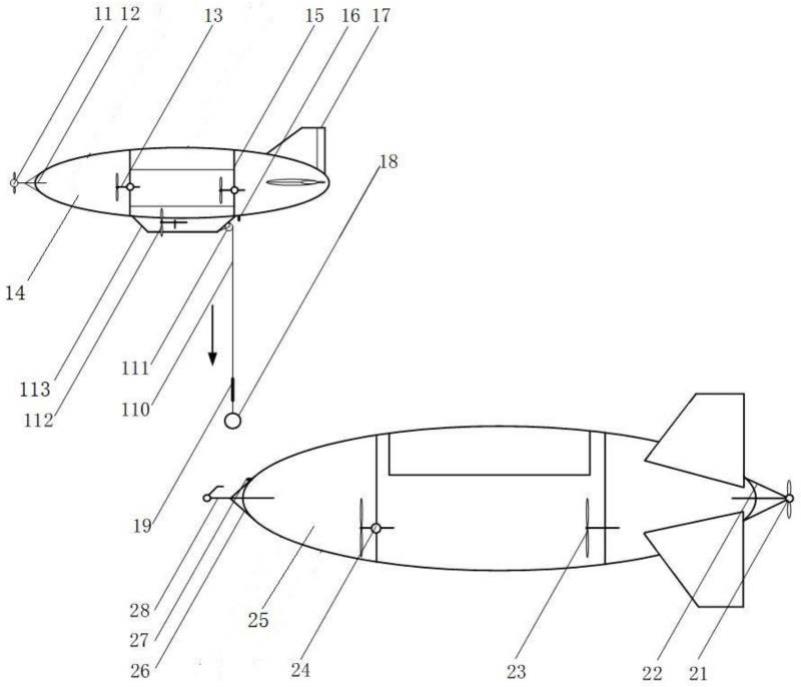
15.图2为主动牵引式系留无人机装置在系留无人机系统的位置示意图。
16.图3为主动牵引式系留无人机装置控制流程图。
17.图4为拉力传感器控制流程图。
具体实施方式
18.如图1至图4所示,一种主动牵引式系留无人机回收装置,包括牵引器外壳1,牵引器外壳1为中空结构,牵引器外壳1内部贯穿连接有t形牵引拉杆3,t形牵引拉杆3的牵引端一体连接有环状结构6,环状结构6用于与系留线缆固定连接。
19.牵引器外壳1的内部设置有拉力传感器5,拉力传感器5用于检测牵引拉杆3对系留无人机整体的拉力。
20.牵引器外壳1的内部设置有第一缓冲器2和第二缓冲器4,第一缓冲器2位于t形拉杆3的上方,第一缓冲器2采用聚氨酯材料制成,用来缓冲拉力传感器与牵引器外壳1顶部 的直接碰撞,起到保护牵引器外壳1的作用;第二缓冲器4位于t形拉杆3的下方,第二缓冲器4采用聚氨酯材料制成,用来缓冲牵引拉杆3与拉力传感器5之间的直接碰撞,避免拉力传感器5受损。
21.当地面控制箱的“回收”按键按下后,开启无人机的回收过程,此时地面控制箱中的收线轮开始收线,同时解锁所述牵引器外壳1,当线拉动所属牵引器的牵引拉杆3对拉力传感器5产生一定拉力时,拉力传感器5将拉力数据传递给mcu,mcu将发送下降指令,无人机在系留线的拉力持续作用下,由系留线的牵引直接降落在控制箱的平台上,完成无人机的回收,其中mcu 为stm32的控制器,采集拉力传感器5受到的拉力与持续时间,按设置好的判定条件进行判断,一旦达到预置参数,则向飞控发送下降信号,让无人机下降。操作人员只需要按一个按钮,等待无人机降落在控制箱中,盖好控制箱盖子,即可完成无人机的回收。本专利通过一个回收按钮及简单的牵引器取代了繁琐的专业控制设备与专业操作人员,实现了简单化、高效率、去专业化控制系留无人机降落回收过程,能够促进系留无人机的推广与应用。
22.以上所述的仅是本实用新型的优选实施例。应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干变型和改进,也应视为属于本实用新型的保护范围。
技术特征:
1.一种主动牵引式系留无人机回收装置,其特征在于:包括牵引器外壳(1),牵引器外壳(1)为中空结构,牵引器外壳(1)内部设置有缓冲结构和拉力传感器(5),拉力传感器(5)用于检测牵引拉杆(3)对系留无人机整体的拉力,牵引拉杆(3)依次贯穿缓冲结构、拉力传感器(5)和牵引器外壳(1)的底部,牵引拉杆(3)的端部设置有连接结构;所述的缓冲结构包括第一缓冲器(2)和第二缓冲器(4),第一缓冲器(2)位于牵引拉杆(3)的上方,第二缓冲器(4)位于牵引拉杆(3)的下方;所述的牵引拉杆(3)为t形结构,水平段位于牵引器外壳(1)的内部,位于第一缓冲器(2)和第二缓冲器(4)之间。2.如权利要求1所述的一种主动牵引式系留无人机回收装置,其特征在于:所述的连接结构为环状结构(6),环状结构(6)用于与系留线缆固定连接。3.如权利要求1所述的一种主动牵引式系留无人机回收装置,其特征在于:所述的第一缓冲器(2)和第二缓冲器(4)均采用聚氨酯材料制成。
技术总结
本实用新型属于一种主动牵引式系留无人机回收装置,其特征在于:包括牵引器外壳,牵引器外壳为中空结构,牵引器外壳内部设置有缓冲结构和拉力传感器,拉力传感器用于检测牵引拉杆对系留无人机整体的拉力,牵引拉杆依次贯穿缓冲结构、拉力传感器和牵引器外壳的底部,牵引拉杆的端部设置有连接结构。解决了目前系留无人机的回收过程中,需采用专业遥控器或地面站控制系统,需要专业飞手控制的问题。需要专业飞手控制的问题。需要专业飞手控制的问题。
技术研发人员:王建新 程大伟 熊伟 付钰惠 韩树楠
受保护的技术使用者:辽宁东科电力有限公司
技术研发日:2021.11.30
技术公布日:2022/8/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。