1.本实用新型涉及无人机技术领域,具体为一种具有防撞功能的无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。机上无驾驶舱,但安装有自动驾驶仪、程序控制装置、信号采集装置等设备。地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输。可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行。
3.专利号cn201920056621.x,公开了一种具有防撞功能的无人机,涉及无人机领域,具体包括无人机本体,所述无人机本体的两侧对称固定安装有固定块,固定块的内部开设有水平的滑槽,滑槽与连接杆的一端滑动连接,连接杆的另一端与固定装置的内壁固定连接,无人机本体两端的固定装置之间均匀固定安装有若干辐条,辐条的两端分别与固定装置固定连接。本实用新型结构简单,制造难度低,降低了企业的生产成本;辐条和固定装置之间固定连接,拆装非常方便,操作简单,极大降低了工作人员的工作难度;固定装置之间均匀固定安装有若干辐条,通过辐条对无人机起到了全面防护的作用,有效提高了对无人机本体的防撞效果,提高了无人机的使用安全性。
4.目前,现有的具有防撞功能的无人机还存在着一些不足的地方,例如;现有的具有防撞功能的无人机,只是单纯利用辐条对无人机进行防护,无法同时对无人机的扇叶和无人机主体进行双重防护,而且不能主动式的自动避让障碍物。
技术实现要素:
5.本实用新型的目的在于提供一种具有防撞功能的无人机,解决了背景技术中所提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种具有防撞功能的无人机,包括无人机体,所述无人机体外侧设置有防撞机构;
7.所述防撞机构包括支撑杆、第一防撞环、第二防撞环、轴承、旋转杆、无人机扇叶、固定杆和第三防撞环;所述无人机体四角均固定连接有支撑杆的一端,所述支撑杆的另一端固定连接有第一防撞环,所述第一防撞环内部贯穿固定有轴承,所述轴承内部转动连接有旋转杆,所述旋转杆后侧贯穿固定有两个无人机扇叶,所述无人机扇叶外侧固定连接有第二防撞环,且两个第二防撞环之间固定连接有固定杆,所述固定杆外侧贯穿有第三防撞环。
8.作为本实用新型的一种优选实施方式,所述无人机体后侧螺栓连接有3d 摄像头,所述无人机体前侧螺栓连接有工控电脑。
9.作为本实用新型的一种优选实施方式,所述无人机体左侧螺栓连接有 gps定位器。
10.作为本实用新型的一种优选实施方式,所述工控电脑与3d摄像头、无人机体和gps定位器信号连接。
11.作为本实用新型的一种优选实施方式,所述支撑杆、第一防撞环、第二防撞环、第三防撞环和固定杆均为不锈金属材质。
12.与现有技术相比,本实用新型的有益效果如下:
13.1.本实用新型通过无人机体上的第一防撞环和无人机扇叶上的第二防撞环,不但可以利用第一防撞环对无人机体整体进行防护,而且利用无人机扇叶上的第二防撞环,能够对无人机扇叶进行防护,不仅如此,在两个第二防撞环之间设置有第三防撞环,利用第三防撞环,能够在第二防撞环撞击物体时,经过第三防撞环使第二防撞环滑过物体,避免影响到无人机体的飞行稳定性,有利于更为实用的使用一种具有防撞功能的无人机。
14.2.本实用新型通过无人机体底部的3d摄像头,利用3d摄像头可以先对整体环境进行采集建模,在建模完成后,利用gps定位器定位,当工控电脑检测到无人机体的定位位置,与建模中的物体接近时,工控电脑会控制无人机体停止移动,从而进行自动避让,有利于更为实用的使用一种具有防撞功能的无人机。
附图说明
15.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
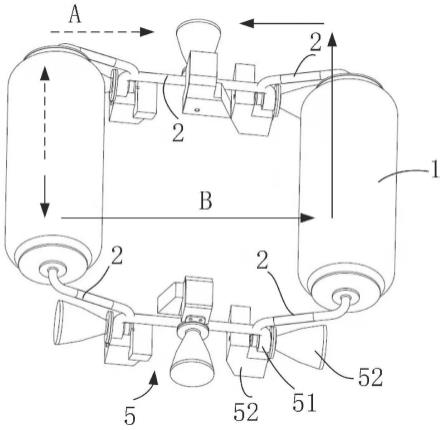
16.图1为本实用新型一种具有防撞功能的无人机的俯视图;
17.图2为本实用新型一种具有防撞功能的无人机的3d摄像头视图;
18.图3为本实用新型一种具有防撞功能的无人机的第三防撞环视图。
19.图中:1,无人机体2,支撑杆3,第一防撞环4,轴承5,旋转杆6,无人机扇叶7,第二防撞环8,gps定位器9,工控电脑10,3d摄像头11,固定杆12,第三防撞环。
具体实施方式
20.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
21.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
22.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
23.请参阅图1-3,本实用新型提供一种技术方案:一种具有防撞功能的无人机,包括无人机体1,所述无人机体1外侧设置有防撞机构;
24.所述防撞机构包括支撑杆2、第一防撞环3、第二防撞环7、轴承4、旋转杆5、无人机扇叶6、固定杆11和第三防撞环12;所述无人机体1四角均固定连接有支撑杆2的一端,所述
支撑杆2的另一端固定连接有第一防撞环 3,所述第一防撞环3内部贯穿固定有轴承4,所述轴承4内部转动连接有旋转杆5,所述旋转杆5后侧贯穿固定有两个无人机扇叶6,所述无人机扇叶6 外侧固定连接有第二防撞环7,且两个第二防撞环7之间固定连接有固定杆 11,所述固定杆11外侧贯穿有第三防撞环12,通过无人机体1上的第一防撞环3和无人机扇叶6上的第二防撞环7,不但可以利用第一防撞环3对无人机体1整体进行防护,而且利用无人机扇叶6上的第二防撞环7,能够对无人机扇叶6进行防护,不仅如此,在两个第二防撞环7之间设置有第三防撞环12,利用第三防撞环12,能够在第二防撞环7撞击物体时,经过第三防撞环12使第二防撞环7滑过物体,避免影响到无人机体1的飞行稳定性。
25.本实施例中请参阅图1,所述无人机体1后侧螺栓连接有3d摄像头 10,所述无人机体1前侧螺栓连接有工控电脑9。通过无人机体1底部的 3d摄像头10,利用3d摄像头10可以先对整体环境进行采集建模,在建模完成后,利用gps定位器8定位,当工控电脑9检测到无人机体1的定位位置,与建模中的物体接近时,工控电脑9会控制无人机体1停止移动,从而进行自动避让。
26.本实施例中请参阅图1,所述无人机体1左侧螺栓连接有gps定位器 8。
27.本实施例中请参阅图1,所述工控电脑9与3d摄像头10、无人机体1 和gps定位器8信号连接。
28.本实施例中请参阅图1,所述支撑杆2、第一防撞环3、第二防撞环7、第三防撞环12和固定杆11均为不锈金属材质。
29.在一种具有防撞功能的无人机使用的时候,先将工控电脑9、无人机体 1、gps定位器8和3d摄像头10与外部电源电性连接,然后将工控电脑9、无人机体1、gps定位器8和3d摄像头10与外部控制开关信号连接,在连接完成后,不但可以利用第一防撞环3对无人机体1整体进行防护,而且利用无人机扇叶6上的第二防撞环7,能够对无人机扇叶6进行防护,不仅如此,在两个第二防撞环7之间设置有第三防撞环12,利用第三防撞环12经过固定杆11转动,能够在第二防撞环7撞击物体时,经过第三防撞环12转动使第二防撞环7滑过物体,利用3d摄像头10可以先对整体环境进行采集建模,在建模完成后,利用gps定位器8定位,当工控电脑9检测到无人机体1的定位位置,与建模中的物体接近时,工控电脑9会控制无人机体1的无人机扇叶6原地旋转,从而进行自动避让物体。
30.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
31.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。