1.本发明涉及汽车领域,特别地,涉及一种携带无人机的智能汽车。
背景技术:
2.随着社会不断地发展,智能汽车已经形成一定的而已趋势,不管是辅助驾驶,或者是完全的自动驾驶,都是目前智能汽车的研发方向。当然,智能汽车不仅是要实现自动驾驶,还要实现更多方面的智能化,例如轮胎自动补气、周边环境监控等。
技术实现要素:
3.有鉴于此,本发明目的是提供一种携带无人机的智能汽车,能够实现轮胎自动补气、周边环境监控等功能。
4.为了实现上述目的,本发明的技术方案是:一种携带无人机的智能汽车,包括汽车本体,所述汽车本体上安装有智能停机仓,所述智能停机仓内配置有无人机,所述无人机上配置有摄像头及充气装置,所述智能停机仓、无人机、与汽车本体的车控系统无线通讯;其中,所述智能停机仓包括仓体、电动仓门和控制系统,所述仓体内设置有用于锁定所述无人机的锁定机构,以及用于对无人机充电的无线充电装置;所述车控系统配置有胎压监测模块,用于检测四个车轮的胎压。
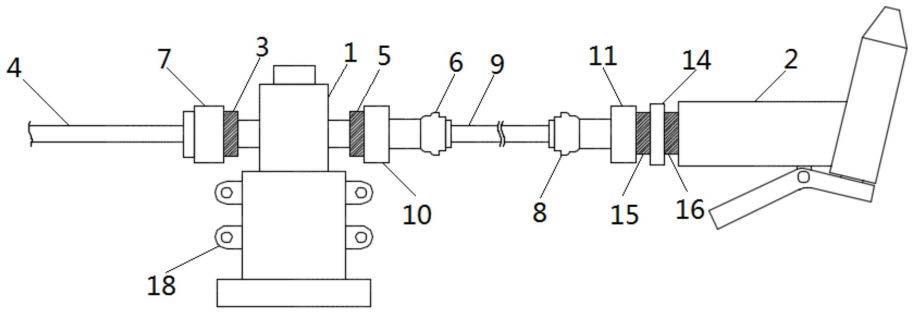
5.优选地,所述充气装置包括壳体、控制板、充气泵、电池、固定套管、充气管套、驱动电机和电动推杆;其中,所述充气泵、电池、驱动电机和电动推杆均安装在壳体内;所述固定套管安装在所述壳体的前端并与壳体转动连接,所述驱动电机的输出轴上安装有主动齿轮,所述固定套管上设置有从动齿轮,所述主动齿轮与从动齿轮啮合;所述充气管套位于固定套管内,其后端通过连接板固定于所述电动推杆的前端,所述充气管套的进气口与充气泵连通;所述充气泵、电池、驱动电机、电动推杆均与控制板电连接;所述控制板与无人机的飞控系统通讯。
6.优选地,所述固定套管的前端设置有螺纹连接口,所述轮胎的气嘴外缘设置有与螺纹连接口适配的螺纹柱。
7.优选地,所述气嘴上设置有图像识别标志。
8.优选地,所述壳体的前端安装有距离传感器,所述距离传感器与控制板电连接。
9.优选地,所述无人机的底部安装有上下角度可调的悬臂,所述充气装置固定在所述悬臂的前端。
10.优选地,还包括自动充气方法:车控系统通过胎压监测模块实时监测四个轮胎的胎压,当某个轮胎的胎压值低于第一预设值时,向智能停机仓发送开仓指令,以及向无人机发送该轮胎的位置信息;智能停机仓接收到开仓指令后,控制电动仓门开启,之后控制伸缩平台向仓门外伸出,以将无人机送出仓体;
在将无人机送出仓体后,控制锁定机构解锁,并向无人机发送已解锁指令;无人机接收到已解锁指令后,立即起飞,并根据上述位置信息飞行至相应的位置;到达后,无人机启动摄像头拍摄对应轮胎的图像,并通过图像识别确定气嘴的位置;在确定气嘴的位置后,无人机调整自身位置,直到气嘴在图像中移动到预定位置;之后,无人机向充气装置发送充气指令;充气装置接收到充气指令后,控制驱动电机驱动固定套管正转,使其逐渐前移,直到与气嘴外部的螺纹柱连接;之后,继续控制电动推杆将充气管套向前推出使得充气管套的前端与气嘴对接;之后,控制气泵启动,向轮胎充气;当轮胎的气压达到上限值后,车控系统向无人机发送返回指令;无人机接收到返回指令后,向充气装置发送终止指令;充气装置接收到终止指令后,控制气泵停止工作、控制电动推杆复位、控制驱动电机驱动固定套管反转至初始位置,之后向无人机返回完成指令;无人机接收到完成指令后返回至伸缩平台上,并向智能停机仓发送着陆指令;智能停机仓接收到着陆指令后,重新激活锁定机构,并控制伸缩平台复位,然后控制电动仓门关闭。
11.本发明技术效果主要体现在以下方面:通过在智能汽车上配置无人机,且无人机上安装有摄像头和充气装置,从而实现周边环境监控及轮胎自动充气。
附图说明
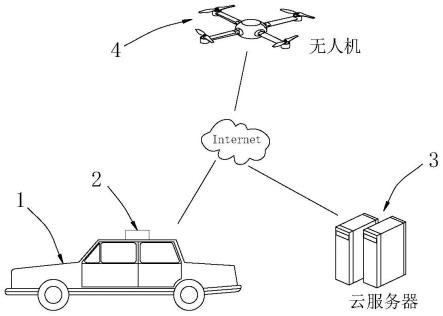
12.图1为实施例中智能汽车与其它装置的通讯示意图;图2为实施例中智能停机仓的示意图;图3为实施例中无人机的示意图;图4为实施例中充气装置的示意图。
13.附图标记:1、汽车本体;2、智能停机仓;21、仓体;22、电动仓门;23、驱动部件;3、云服务器;4、无人机;5、充气装置;51、壳体;52、充气泵;53、电池;54、固定套管;541、从动齿轮;55、充气管套;56、连接管;57、驱动电机;571、主动齿轮;58、电动推杆;59、距离传感器;6、悬臂;7、气嘴。
具体实施方式
14.以下结合附图,对本发明的具体实施方式作进一步详述,以使本发明技术方案更易于理解和掌握。
15.参照图1,本实施例提供了一种携带无人机的智能汽车,包括汽车本体1,汽车本体1上安装有智能停机仓2,智能停机仓2内配置有无人机4,智能停机仓2、无人机4、与汽车本体1的车控系统无线通讯,具体是通过云服务器3通讯。
16.参照图2,上述的智能停机仓2包括仓体21、电动仓门22和控制系统,仓体21内设置有用于锁定无人机4的锁定机构,以及用于对无人机4充电的无线充电装置。该锁定机构可以采用磁吸装置或卡爪装置,采用磁吸装置的,对应地在无人机4的脚架底部安装铁片,从而实现对无人机4锁定。无线充电装置的发射线圈可以设置于仓体21的内底面,同时在无人机4的脚架底部安装接收线圈。控制系统配置有无人机4起降引导及定位程序,可引导无人
机4在仓体21内精准的起降。值得说明的是,智能停机仓2可以由智能汽车内的电源供电。
17.另外,智能汽车的车控系统配置有胎压监测模块,用于检测四个车轮的胎压。
18.参照图3、图4,无人机4上配置有摄像头及充气装置5,其中,充气装置5包括壳体51、控制板、充气泵52、电池53、固定套管54、充气管套55、驱动电机57和电动推杆58。其中,充气泵52、电池53、驱动电机57和电动推杆58均安装在壳体51内;固定套管54安装在壳体51的前端并与壳体51转动连接,驱动电机57的输出轴上安装有主动齿轮571,固定套管54上设置有从动齿轮541,主动齿轮571与从动齿轮541啮合,通过控制驱动电机57,可驱动固定套管54正反转。固定套管54的前端设置有螺纹连接口,轮胎的气嘴7外缘设置有与螺纹连接口适配的螺纹柱,进而通过驱动固定套管54旋转,可实现固定套管54与气嘴7固定。
19.充气管套55位于固定套管54内,其后端通过连接板固定于电动推杆58的前端,充气管套55的进气口通过连接管56与充气泵52连通,充气管的前端设置为与市面上的充气装置5的端头结构相同。
20.气嘴7上设置有图像识别标志,可方便无人机4通过摄像头拍摄的图像进行识别和定位。壳体51的前端安装有距离传感器59,距离传感器59用于确定固定套管54与气嘴7的距离,当固定套管54接近气嘴7时,距离传感器59正好被触发。
21.上述的距离传感器、充气泵52、电池53、驱动电机57、电动推杆58均与控制板电连接;控制板与无人机4的飞控系统通讯。
22.摄像头可安装在壳体51上。
23.同时,在无人机4的底部安装有上下角度可调的悬臂6,充气装置5固定在悬臂6的前端。该悬臂6包括两个由电机驱动的旋转关节,电机与无人机4的内部控制电路连接。
24.本实施例的工作原理是:车控系统通过胎压监测模块实时监测四个轮胎的胎压,当某个轮胎的胎压值低于第一预设值时,向智能停机仓2发送开仓指令,以及向无人机4发送该轮胎的位置信息。
25.智能停机仓2接收到开仓指令后,控制电动仓门22开启,之后控制伸缩平台向仓门外伸出,以将无人机4送出仓体21。
26.在将无人机4送出仓体21后,控制锁定机构解锁,并向无人机4发送已解锁指令。
27.无人机4接收到已解锁指令后,立即起飞,并根据上述位置信息飞行至相应的位置;到达后,无人机4启动摄像头拍摄对应轮胎的图像,并通过图像识别确定气嘴7的位置;在确定气嘴7的位置后,无人机4调整自身位置,直到气嘴7在图像中移动到预定位置;然后缓慢向前移动,直到距离传感器59被触发;之后,无人机4向充气装置5发送充气指令。
28.充气装置5接收到充气指令后,控制驱动电机57驱动固定套管54正转,使其逐渐前移,直到与气嘴7外部的螺纹柱连接;之后,继续控制电动推杆58将充气管套55向前推出使得充气管套55的前端与气嘴7对接;之后,控制气泵启动,向轮胎充气。
29.当轮胎的气压达到上限值后,车控系统向无人机4发送返回指令;无人机4接收到返回指令后,向充气装置5发送终止指令。
30.充气装置5接收到终止指令后,控制气泵停止工作、控制电动推杆58复位、控制驱动电机57驱动固定套管54反转至初始位置,之后向无人机4返回完成指令。
31.无人机4接收到完成指令后返回至伸缩平台上,并向智能停机仓2发送着陆指令;值得说明提,智能停机仓2配置有起降引导模块,可引导无人机4顺利降落在伸缩平台上。由
于无人机起降引导技术为现有技术,因此本实施例不再赘述。
32.智能停机仓2接收到着陆指令后,重新激活锁定机构,并控制伸缩平台复位,然后控制电动仓门22关闭。
33.当然,以上只是本发明的典型实例,除此之外,本发明还可以有其它多种具体实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本发明要求保护的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。