1.本实用新型涉及核电厂检查设备技术领域,尤其涉及一种浮游式核电厂一回路水池视频检查机器人。
背景技术:
2.核电厂一回路水池是核电厂一回路系统重要的设施之一,主要包括压力容器、换料水池、乏燃料水池等。大修期间压力容器开盖、换料、以及对一回路设施的检查和维修大多是在一回路水池,同时在有水环境下进行。
3.其中,视频检查是在役检查中一个非常重要的方法,目前常用的方法是将水下摄像头安装在专用的检查设备上,这些检查设备往往都比较大,使用起来非常不方便。同时设备的成本高,操作人员的劳动强度大,还要承担较大的辐射风险。部分操作还要占用环吊或换料小车,直接影响整个大修的主线时间。
4.对于其它在役检查和维修工作,需要水下摄像头配合监视。目前多数设备都是自带水下摄像头,以便观察作业工具的动作。但自带的摄像头由于数量和布局影响,其观察范围比较有限。因此,需要配合外置的摄像头进行辅助监视,以保证水下作业的安全性。外置的摄像头的固定方式一般为长杆工具,长杆工具固定在便桥的安装座上,长杆的另一端安装摄像头,由人员调整长杆工具的位置和高度。整个过程如果需要更换摄像头的位置,需要不停的移动便桥和长杆安装座,效率非常低,人员的工作强度也大。
5.随着水下机器人技术的发展,在核电厂一回路水池得到应用,水下机器人可以大大地减小人员的工作强度。水下检查和监视时,只用将水下机器人放入水池中,再控制机器人游到水下任何可达空间位置。目前的水下机器人在定深技术方面,由于水深变化不大,一般都能达到较高的精度。定航向方面,只要传感器性能可靠,角度飘移不大,在一定的时间内机器人的航向角也能保持在一定范围内。但平面位置方面,由于没有基准,很难实现精确定位,如果人员不进行干预,设备一段时间后,很有可能运动到其它位置了。
技术实现要素:
6.本实用新型的目的在于克服现有技术中所述的缺陷,从而提供一种浮游式核电厂一回路水池视频检查机器人,该浮游式核电厂一回路水池视频检查机器人能够测量机器人本体在水平方向上与周边物体的距离,通过该距离值进行水平方向定位,实现机器人水下的自动避障,大大地提高水下机器人在核电厂一回种水下工作的效率。
7.为了实现上述目的,本实用新型提供如下技术方案:
8.一种浮游式核电厂一回路水池视频检查机器人,包括机架组件,所述机架组件内安装有电子舱和推进器,所述机架组件上设有水下摄像头,所述机架组件的周侧设有高度计用以测量机器人本体在水平方向上与周边物体的距离。
9.作为一种可实施的方式,所述机架组件的前侧至少安装两个所述高度计。
10.作为一种可实施的方式,所述机架组件的后侧安装有所述高度计。
11.作为一种可实施的方式,所述机架组件的底部安装有深度计。
12.作为一种可实施的方式,所述机架组件的顶部安装有浮块。
13.作为一种可实施的方式,所述机架组件内至少安装有两组所述推进器,其中一组所述推进器水平布置,另一组所述推进器垂直布置。
14.作为一种可实施的方式,所述机架组件的前侧具有凹部,所述水下摄像头安装于所述凹部。
15.与现有技术相比,本实用新型提供的浮游式核电厂一回路水池视频检查机器人具有以下有益效果:
16.本实用新型提供的浮游式核电厂一回路水池视频检查机器人通过深度计可准确反馈机器人的深度,并进行定深控制,可以使机器人稳定在指定深度。定深后,机器人四周的高度计可以准确地测出机器人与周边物体的距离,定位功能打开后,机器人可以稳定在指定的位置,大大地提高水下机器人在核电厂一回种水下工作的效率。当被检查对象是平面,机器人横向移动时,可以保证机器人的航向以及与被检查表面的距离始终不变。
附图说明
17.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
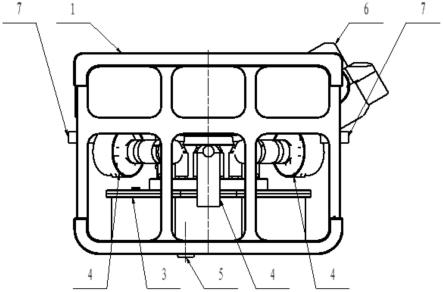
18.图1为本实用新型实施例所提供的浮游式核电厂一回路水池视频检查机器人的主视图;
19.图2为本实用新型实施例所提供的浮游式核电厂一回路水池视频检查机器人的俯视图。
20.附图标记说明:
21.1、机架组件,2、浮块,3、电子舱,4、推进器,5、深度计,6、水下摄像头,7、高度计。
具体实施方式
22.虽然本实用新型的浮游式核电厂一回路水池视频检查机器人可以通过多种不同方式来实施,但是本文将结合附图对示例性实施方式进行详细描述,可以理解的是,本文的描述应被认为是对浮游式核电厂一回路水池视频检查机器人的结构进行举例说明,而无意将本实用新型的保护范围局限于示例性实施方式。因此,在本质上,附图和具体实施方式的描述应被认为用于说明而非限制本实用新型。
23.在本实用新型的描述中,需要说明的是,本文的术语“上”、“下”、“左”、“右”、“前”、“后”、“内”、“外”、“水平”、“竖直”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或部件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.下面通过具体实施方式进一步详细说明。
25.如图1和图2所示,本实用新型提供了一种浮游式核电厂一回路水池视频检查机器人,包括机架组件1、浮块2、电子舱3、推进器4、深度计5、水下摄像头6和高度计7。所述机架
组件1内安装有电子舱3和推进器4,所述机架组件1上设有水下摄像头6,所述机架组件1的周侧设有高度计7用以测量机器人本体在水平方向上与周边物体的距离。
26.机架组件1是整个机器人的安装基础。浮块2安装在机架组件1的上部,为机器在人提供浮力。电子舱3安装在机架组件1的内部靠下位置,内部有各种传感器、电源、控制器和通讯模块等,是整个机器人本体的控制核心。
27.推进器4安装在机架组件1的中间,有多组,有水平分布,也有垂直分布,为水下机器人的水下运动提供推进力,根据工作要求不同,其数量和分布各不相同,一般情况推进器的数量越多,机器人的水下控制效果越好。优选地,机架组件1内至少安装有两组推进器4,其中一组推进器4水平布置,另一组推进器4垂直布置。推进器4的控制和动力由电子舱3提供。
28.深度计5安装在电子舱3里面靠下位置,其探头伸入水中,用于测量水的压力,用机器人水下定深提供数据。水下摄像头6安装在机架组件1的前部靠上位置,用于机器人的水下视频检查和监视。更为具体地,如图2所示,机架组件1的前侧具有凹部,水下摄像头6安装于凹部。高度计7安装在机架组件1的四周,用于测量机器人本体在水平方向上与周边物体的距离,根据工作要求不同,其数量和分布各不相同,一般情况机器人的工作面,即前面至少安装2个高度计7。
29.本实用新型提供的浮游式核电厂一回路水池视频检查机器人的定位方式为:机器人工作时,先下潜到工作需要的水深,并进行定深。然后控制水平推进器,将机器人运动到水平方向合适的位置,此时如果对水平推进器不进行控制,那么机器人会受主电缆和水流影响,运动到不受水平力的位置。利用机器人周边的高度计7测出机器人本体与周边物体的距离,通过上位机算法,对水平位置和航向进行闭环控制,实现水平方向的自动定位。
30.核电厂一回水池进行视频检查时,常见的工况就是机器人与被检查面距离保证不变,机器人横向移动。此时,可以利用机器人前面的2个高度计7,实时地测出机器人的前部与被检查面的距离,使用上位机算法,保证机器人的前部与被检查面的距离和角度不变。
31.本实用新型提供的浮游式核电厂一回路水池视频检查机器人的使用方式为:工作时,先将机器人放置到核电厂一回种水池中,控制机器人进行向下运动,当达到需要的深度时进行定深。再控制水平推进器,将机器人运动到水平方向合适的位置,打开水平定位功能,机器人可以稳定地停在水平位置。如果被检查面是平面的话,先控制机器人,运动到被检查面前面,同时调速航向,使机器人的前面与被检面平行。此时,打开前面定位功能,可以保证机器人横向移动过程中,机器人的前部与被检查面的距离和角度不变。
32.以上所述仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。