技术特征:
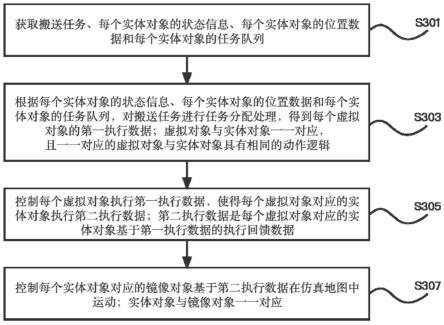
1.一种自动引导车的调度控制方法,用于数字孪生系统,其特征在于,包括:获取搬送任务、每个实体对象的状态信息、所述每个实体对象的位置数据和所述每个实体对象的任务队列;根据所述每个实体对象的状态信息、所述每个实体对象的位置数据和所述每个实体对象的任务队列,对所述搬送任务进行任务分配处理,得到每个虚拟对象的第一执行数据;所述虚拟对象与所述实体对象一一对应,且一一对应的所述虚拟对象与所述实体对象具有相同的动作逻辑;控制所述每个虚拟对象执行所述第一执行数据,使得所述每个虚拟对象对应的实体对象执行第二执行数据;所述第二执行数据是所述每个虚拟对象对应的实体对象基于所述第一执行数据的执行回馈数据;控制所述每个实体对象对应的镜像对象基于所述第二执行数据在仿真地图中运动;所述实体对象与所述镜像对象一一对应。2.根据权利要求1所述的方法,其特征在于,所述第一执行数据包括第一动作序列、第一任务序列和第一行进路径;所述第二执行数据包括第二动作序列、第二任务序列和第二行进路径;所述第一动作序列和所述第一任务序列一一对应,所述第一动作序列对应的执行时间和所述第一任务序列对应的执行时间相等;所述第一行进路径包括行进节点集合。3.根据权利要求2所述的方法,其特征在于,所述控制所述每个虚拟对象执行所述第一执行数据,使得所述每个虚拟对象对应的实体对象执行第二执行数据之前,还包括:获取所述行进节点集合中每个行进节点的第一属性值;若所述行进节点的第一属性值为空,对所述行进节点进行预约处理,使得所述行进节点的所述第一属性值更新为第二属性值;所述第二属性值为所述虚拟对象的属性值。4.根据权利要求3所述的方法,其特征在于,若所述行进节点集合中存在至少一个行进节点在预设时间段内的所述第一属性值为非空,对所述第一执行数据进行更新处理,得到更新后的第一执行数据。5.根据权利要求2所述的方法,其特征在于,所述控制所述每个虚拟对象执行所述第一执行数据,使得所述每个虚拟对象对应的实体对象执行第二执行数据之后,还包括:若所述第一动作序列与所述第二动作序列、所述第一任务序列与所述第二任务序列、所述第一行进路径与所述第二行进路径中存在非对应匹配,控制执行所述第一执行数据的虚拟对象处于任务等待状态。6.根据权利要求1所述的方法,其特征在于,所述获取搬送任务、每个实体对象的状态信息、所述每个实体对象的位置数据和所述每个实体对象的任务队列之前,还包括:创建仿真模型;所述仿真模型包括所述仿真地图、所述每个实体对象对应的虚拟对象、所述每个实体对象对应的镜像对象;所述仿真地图与所述每个实体对象对应的实体地图相同,所述实体地图包括参照对象的位置信息和所述参照对象对应的动作信息。7.根据权利要求2所述的方法,其特征在于,所述第一动作序列包括前进、后退、定位、旋转、升降和移栽;
所述第一任务序列包括等待、装载和卸载。8.一种自动引导车的调度控制装置,用于数字孪生系统,其特征在于,包括:获取模块,用于获取搬送任务、每个实体对象的状态信息、所述每个实体对象的位置数据和所述每个实体对象的任务队列;分配模块,用于根据所述每个实体对象的状态信息、所述每个实体对象的位置数据和所述每个实体对象的任务队列,对所述搬送任务进行任务分配处理,得到每个虚拟对象的第一执行数据;所述虚拟对象与所述实体对象一一对应,且一一对应的所述虚拟对象与所述实体对象具有相同的动作逻辑;第一控制模块,用于控制所述每个虚拟对象执行所述第一执行数据,使得所述每个虚拟对象对应的实体对象执行第二执行数据;所述第二执行数据是所述每个虚拟对象对应的实体对象基于所述第一执行数据的执行回馈数据;第二控制模块,用于控制所述每个实体对象对应的镜像对象基于所述第二执行数据在仿真地图中运动;所述实体对象与所述镜像对象一一对应。9.一种电子设备,其特征在于,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现权利要求1-7任意一项所述的自动引导车的调度控制方法。10.一种计算机可读存储介质,其特征在于,所述存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由处理器加载并执行以实现如权利要求1-7任意一项所述的自动引导车的调度控制方法。
技术总结
本申请实施例提供了一种自动引导车的调度控制方法、装置、电子设备及存储介质,调度控制方法用于数字孪生系统,包括根据搬送任务、每个实体对象的状态信息、位置数据和任务队列对搬送任务进行任务分配处理,得到每个虚拟对象的第一执行数据;控制每个虚拟对象执行第一执行数据,使得每个虚拟对象对应的实体对象执行第二执行数据;控制每个实体对象对应的镜像对象基于第二执行数据在仿真地图中运动。本申请实施例将自动引导车的调度控制系统直接集成在数字孪生虚拟工厂,取消供应商的AGV调度控制系统的中间层数据传递,可以提升数据传输效率,使得数字孪生虚拟工厂的虚拟AGV运行明与现场的AGV本体同步。与现场的AGV本体同步。与现场的AGV本体同步。
技术研发人员:丁华 毕兴伟 杨贵林 王博 严丽娟
受保护的技术使用者:浙江西图盟数字科技有限公司
技术研发日:2022.04.01
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。