基于hammerstein模型的cstr反应器控制方法和装置
技术领域
1.本发明涉及工业控制技术领域,具体涉及一种基于hammerstein模型的 cstr反应器控制方法和一种基于hammerstein模型的cstr反应器控制装置。
背景技术:
2.cstr反应器是一种常见的化工过程反应装置,具有高度非线性特性,在 石油化工领域起着重要的作用,其操作状况对产品质量及生产安全有着重要 的影响,因此对于cstr反应器系统控制技术的研究受到广泛关注。为了保 证反应的正常进行,需要对反应器中的某些关键工艺参数(如浓度、温度等) 进行控制使系统稳定。
3.随着工业控制智能化需求的提高,对系统的快速性、稳定性和准确性也 提出了更高的要求。但是,在实际生产过程中,过程工业往往具有高度非线 性、多模态以及不确定性等综合复杂性特征,这些因素导致难以建立精确的 数学模型,这给控制器的设计和系统稳定性分析带来极大的困难,同时难以 有效控制和提高生产效率。因此,研究cstr反应器系统的辨识建模和控制 具有重要的意义。
4.目前,在cstr反应器系统辨识与控制的研究中取得许多重要成果,形 成了各具特色的理论方法,但依然存在以下两方面问题:其一,在cstr反 应器系统辨识方面,现有的主要辨识方法中往往存在参数的乘积项,需要进 一步采用参数分解技术(如奇异值分解、平均法等)分离混合参数,增加了 计算复杂性,降低了参数辨识的精度;其二,在cstr反应器控制方面,现 有的复合控制策略能够取得好的控制效果,但存在计算量大,控制规律复杂 等问题。
技术实现要素:
5.本发明为解决上述技术问题,提供了一种基于hammerstein模型的cstr 反应器控制方法,采用组合信号源实现hammerstein模型的静态非线性模块和 动态线性模块的参数分离,不仅简化参数辨识过程,还降低了计算难度,并 且利用hammerstein模型的特殊结构将cstr反应器的非线性控制问题转化为 线性控制问题,简化了控制设计。
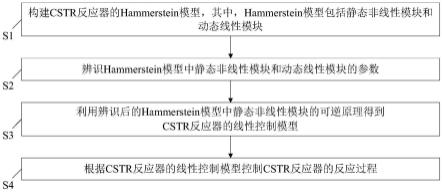
6.一种基于hammerstein模型的cstr反应器控制方法,包括以下步骤:构 建cstr反应器的hammerstein模型,其中,所述hammerstein模型包括静态 非线性模块和动态线性模块;辨识所述hammerstein模型中静态非线性模块和 动态线性模块的参数;利用辨识后的所述hammerstein模型中静态非线性模块 的可逆原理得到所述cstr反应器的线性控制模型;根据所述cstr反应器 的线性控制模型控制所述cstr反应器的反应过程。
7.根据本发明的一个实施例,所述构建cstr反应器的hammerstein模型, 具体包括以下步骤:采用神经模糊模型拟合所述hammerstein模型的静态非线 性模块;采用传递函数模型拟合所述hammerstein模型的动态线性模块。
8.根据本发明的一个实施例,所述神经模糊模型为四层神经模型,其中, 所述神经模糊模型的第一层为输入层,所述神经模糊模型的第二层为高斯隶 属度函数层,所述神经
模糊模型的第三层为模糊规则层,所述神经模糊模型 的第四层为输出层。
9.根据本发明的一个实施例,所述传递函数模型为:
[0010][0011][0012][0013]
其中,z-1
表示单位后移算子,ai(i=1,2,
…
,na)、bj(j=1,2,
…
,nb)分别表示 未知参数。
[0014]
根据本发明的一个实施例,所述hammerstein模型的表达式为:
[0015]
v(k)=f(u(k))
[0016]
y(k)=l(
·
)v(k)
[0017]
其中,k表示采样时间,y(k)表示所述cstr反应器的系统输出,u(k)表 示所述cstr反应器的系统输入,v(k)表示所述静态非线性模块输出, 表示所述动态线性模块输出。
[0018]
根据本发明的一个实施例,所述辨识所述hammerstein模型中静态非线性 模块和动态线性模块的参数,具体包括以下步骤:获取所述cstr反应器反 应过程的组合式信号源,其中,所述组合式信号源包括可分离信号和随机信 号;利用所述可分离信号分离所述静态非线性模块和所述动态线性模块的参 数;利用所述可分离信号、lipschitz商准则和最小二乘法辨识所述动态线性 模块的参数;利用所述随机信号、聚类算法、辅助误差和概率密度函数辨识 所述静态非线性模块的参数。
[0019]
根据本发明的一个实施例,所述线性控制模块为pi控制器。
[0020]
一种基于hammerstein模型的cstr反应器控制装置,包括:建模模块, 所述建模模块用于构建cstr反应器的hammerstein模型,其中,所述 hammerstein模型包括静态非线性模块和动态线性模块;辨识模块,所述辨识 模块用于辨识所述hammerstein模型中静态非线性模块和动态线性模块的参 数;处理模块,所述处理模块用于利用辨识后的所述hammerstein模型中静态 非线性模块的可逆原理得到所述cstr反应器的线性控制模型;控制模块, 所述控制模块用于根据所述cstr反应器的线性控制模型控制所述cstr反 应器的反应过程。
[0021]
根据本发明的一个实施例,所述建模模块具体用于采用神经模糊模型拟 合所述hammerstein模型的静态非线性模块,采用传递函数模型拟合所述 hammerstein模型的动态线性模块。
[0022]
根据本发明的一个实施例,所述神经模糊模型为四层神经模型,其中, 所述神经模糊模型的第一层为输入层,所述神经模糊模型的第二层为高斯隶 属度函数层,所述神经模糊模型的第三层为模糊规则层,所述神经模糊模型 的第四层为输出层。
[0023]
本发明的有益效果如下:
[0024]
(1)本发明通过采用组合信号源实现hammerstein模型的静态非线性模 块和动态线性模块的参数分离,不仅简化参数辨识过程,还降低了计算难度;
[0025]
(2)本发明通过采用辅助误差和概率密度函数辨识所述静态非线性模块 的参数,不仅能够控制模型误差的空间状态分布,保证误差分布趋于正态分 布,还能够提高模型的精度;
[0026]
(3)本发明通过利用hammerstein模型的特殊结构将cstr反应器的非 线性控制问题转化为线性控制问题,简化了控制设计。
附图说明
[0027]
图1为本发明实施例的基于hammerstein模型的cstr反应器控制方法的 流程图;
[0028]
图2为本发明一个实施例的辨识hammerstein模型中静态非线性模块和动 态线性模块的参数的流程图;
[0029]
图3为本发明一个具体实施例的辨识hammerstein模型中静态非线性模块 和动态线性模块的参数的流程图;
[0030]
图4为本发明一个实施例的基于hammerstein模型的cstr反应器控制方 法的应用流程图;
[0031]
图5(a)为本发明一个具体实施例的从原稳态工作点0跃变到新的工作 点-0.5时的浓度变化图;
[0032]
图5(b)为本发明一个具体实施例的从原稳态工作点0跃变到新的工作 点-0.5时的流速变化图;
[0033]
图6为本发明实施例的基于hammerstein模型的cstr反应器控制装置的 方框示意图。
具体实施方式
[0034]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行 清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而 不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做 出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0035]
首先需要说明的是,在cstr反应器的厌氧反应过程可通过控制输入 cstr反应器的输入变量的流速来控制输出变量的浓度,并且在一个给定的厌 氧反应过程中,cstr反应器的动态特性可表示为:
[0036][0037][0038]
其中,ca表示反应物a,即输入变量的浓度,cb表示反应物b,即输出 变量的浓度,f表示反应物a,即输入变量的流速,k1、k2、k3表示动力学参 数,c
af
表示反应物a的饲料浓度,v表示cstr反应器的体积。通过化简上 述cstr反应器的动态特性表达式,可将反应物a,即输入变量的浓度ca消 掉,从而可得到反应物a,即输入变量的流速f与反应物b,即输出变量的浓 度cb之间的关系。
[0039]
由此可知,能够通过控制反应物a,即输入变量的流速f来控制反应物b, 即输出变
量的浓度cb。基于上述认知,本发明实施例提出了一种基于 hammerstein模型的cstr反应器控制方法。
[0040]
如图1所示,本发明实施例的基于hammerstein模型的cstr反应器控制 方法,包括以下步骤:
[0041]
s1,构建cstr反应器的hammerstein模型,其中,hammerstein模型包 括静态非线性模块和动态线性模块。
[0042]
具体地,可采用神经模糊模型拟合hammerstein模型的静态非线性模块, 并可采用传递函数模型拟合hammerstein模型的动态线性模块。
[0043]
在本发明的一个实施例中,神经模糊模型可为四层神经模型,其中,神 经模糊模型的第一层可为输入层,神经模糊模型的第二层可为高斯隶属度函 数层,神经模糊模型的第三层可为模糊规则层,神经模糊模型的第四层可为 输出层。其中,神经模糊模型还包括rbf(径向基)神经网络和模糊神经网 络。
[0044]
具体地,神经模糊模型的第一层,即输入层可用于接收输入信号,例如 输入变量u(t),并可将输入信号,例如输入变量u(t)直接传递至神经模糊模型 的第二层,即高斯隶属度函数层
[0045]
其中,神经模糊模型的第二层,即高斯隶属度函数层可采用下列公式计 算接收到的输入信号,例如输入变量u(t)的隶属度函数:
[0046][0047]
其中,l为模糊规则数,c
l
为隶属度函数的中 心,σ
l
为隶属度函数的宽度。
[0048]
此外,需要说明的是,神经模糊模型的第三层,即模糊规则层中的每个 每个神经元表示一条模糊规则,由此可确定隶属度函数中l,即模糊规则数的 数量。
[0049]
进一步地,计算得到输入信号,例如输入变量u(t)的隶属度函数后,可通 过神经模糊模型的第四层,即输出层输出,具体可通过神经模糊模型的第四 层,即输出层的单个神经元输出信号进行表示:
[0050][0051]
其中,w
l
(l=1,
…
,l)为神经模糊模型的权重。
[0052]
在本发明的一个实施例中,传递函数模型可为:
[0053][0054]
[0055][0056]
其中,z-1
表示单位后移算子,ai(i=1,2,
…
,na)、bj(j=1,2,
…
,nb)分别表示 未知参数。
[0057]
由此,可得到cstr反应器的hammerstein模型的表达式为:
[0058]
v(k)=f(u(k))
[0059]
y(k)=l(
·
)v(k)
[0060]
其中,k表示采样时间,y(k)表示cstr反应器的系统输出,u(k)表示cstr 反应器的系统输入,v(k)表示静态非线性模块输出,表示动态线性模 块输出。
[0061]
s2,辨识hammerstein模型中静态非线性模块和动态线性模块的参数。
[0062]
具体地,上述步骤s2,还可包括以下步骤:
[0063]
s201,获取cstr反应器反应过程的组合式信号源,其中,组合式信号 源包括可分离信号和随机信号。
[0064]
具体地,组合式信号源中的可分离信号可为二进制信号。
[0065]
s202,利用可分离信号分离静态非线性模块和动态线性模块的参数。
[0066]
具体地,可利用可分离信号,即二进制信号不激发静态非线性模块的特 性,以将hammerstein模型中静态非线性模块和动态线性模块的参数分离。需 要说明的是,可分离信号,即二进制信号经过静态非线性模块后,得到的输 出信号与输入信号将保持同频率不同幅值,即v(k)=a0u(k)(a0为常量),由 此,可利用该特性实现静态非线性模块与动态线性模块的分离。通过分离静 态非线性模块和动态线性模块的参数,能够简化参数辨识过程,从而降低参 数辨识难度。
[0067]
s203,利用可分离信号、lipschitz商准则和最小二乘法辨识动态线性模 块的参数。
[0068]
具体地,基于可分离信号,即二进制信号的输入输出数据,可利用lipschitz 商准则确定传递函数模型的阶次,即na和nb的值,然后可利用最小二乘法辨 识动态线性模块的未知参数,即ai(i=1,2,
…
,na)和bj(j=1
,
2,
…
,nb)。
[0069]
更具体地,利用最小二乘法辨识动态线性模块的未知参数的具体计算表 达可为:
[0070][0071]
其中,其中, p
l
为可分离信号,即二进制信号的输入输出数据的数目。
[0072]
s204,利用随机信号、聚类算法、辅助误差和概率密度函数辨识静态非 线性模块的参数。
[0073]
具体地,基于随机信号的输入输出数据,可利用聚类算法计算神经模糊 模型的隶属度函数中心c
l
和隶属度函数宽度σ
l
,在此基础上,可利用辅助误 差和概率密度函数更新神经模糊模型的权重w
l
。
[0074]
更具体地,上述利用聚类算法计算神经模糊模型的隶属度函数的中心c
l
和隶属度函数的宽度σ
l
的步骤,还可包括以下步骤:可将随机信号的输入数 据u(1)作为第一聚类,并可设第一聚类的聚类中心c1=u(1),进一步地,可将 随机信号中的第k个输入数据u(k),根据相似性判据 (n表示随机信号的输入数据的总数,e表示指数函数)计算第k个输入数据 u(k)的与每一个聚类中心的相似性,从而判断是否增加新的聚类,并按照调整聚类中心(n
l
表示属于第l个聚类的数目,λ∈[0,1] 表示可调参数),重复执行该步骤直到随机信号中的所有输入数据都被分配 到相应的聚类为止,然后可根据计算隶属度函数的宽度σ
l (ρ表示交叠参数,通常取1≤ρ≤2)。
[0075]
更具体地,上述利用辅助误差和概率密度函数更新神经模糊模型的权重 w
l
的过程,还可包括以下步骤:可先根据cstr反应器的系统输出y(k)计算 系统误差并可将系统误差导入到基于辅助误差模型的自适 应系统中,从而可得到辅助误差e1(k),然后可累积存储辅助误差e1(k)并产生 辅助误差序列集,进而可利用概率密度函数对辅助误差序列集进行估计,从 而可得到相应的估计值γ
error
(γ),进而可在此基础上定义均方准则函数j,最 后可通过更新神经模糊模型的权重w
l
,直至辅助误差概率密度函数跟踪给定 的目标概率密度函数。
[0076]
其中,辅助误差e1(k)的计算公式具体如下:
[0077][0078]
其中,α和β是常量,其中,α和β是常量,
[0079]
其中,估计值γ
error
(γ)的计算公式具体如下:
[0080][0081]
其中,表示窗宽。
[0082]
其中,均方准则函数j的计算公式具体如下:
[0083][0084]
综上可知,在辨识hammerstein模型的过程中,需要遍历所有的输入变量, 即可分离信号的输入输出数据和随机信号的输入输出数据,从而得到动态线 性模型的参数和静态非线性模型的参数,具体如图3所示:
[0085]
s201,获取cstr反应器反应过程的组合式信号源,其中,组合式信号 源包括可分离信号和随机信号;
[0086]
s202,利用可分离信号分离静态非线性模块和动态线性模块的参数;
[0087]
s2031,利用可分离信号,即二进制信号和lipschitz商准则辨识动态线性 模型中传递函数模型的阶次;
[0088]
s2032,最小二乘法辨识动态线性模块的未知参数
[0089]
s2041,初始化k=1;
[0090]
s2042,归一化处理随机信号的输入输出数据;
[0091]
s2043,利用聚类算法计算神经模糊模型的隶属度函数的中心c
l
和隶属度 函数的宽度σ
l
;
[0092]
s2044,利用辅助误差和概率密度函数更新神经模糊模型的权重w
l
;
[0093]
s2045,更新模型参数;
[0094]
s2046,判断是否遍历随机信号中的所有输入输出数据,若是,则结束辨 识过程,若否,则返回执行步骤s2042。
[0095]
s3,利用辨识后的hammerstein模型中静态非线性模块的可逆原理得到 cstr反应器的线性控制模型。
[0096]
具体地,基于辨识后的hammerstein模型,可利用其静态非线性模块的逆 函数f-1
(
·
)将cstr反应器的非线性控制转换为线性控制,并确定cstr反应 器的线性控制模型。其中,cstr反应器的线性控制模型可为pi控制器。
[0097]
s4,根据cstr反应器的线性控制模型控制cstr反应器的反应过程。
[0098]
具体地,可采用cstr反应器的线性控制模型,即pi控制器控制cstr 反应器厌氧反应过程中的反应物b,即输出变量的浓度cb。更具体地,如图 4所示,可根据参考轨迹为线性控制模块,即pi控制器输入设定值,例如设 置线性控制模块,即pi控制器的控制参数kc=0.65,τi=3.8,浓度的目标值设 定为-0.5,进而可利用其静态非线性模块的逆函数f-1
(
·
)将cstr反应器的非线 性控制转换为线性控制,以控制cstr反应器的输出。
[0099]
下面将结合根据cstr反应器的动态特性表达式得到的反应物a,即输入 变量的流速f的初始值f0=34.3(l/h)以及反应物b,即输出变量的浓度cb的 初始值c
b0
=1.12(mol/l),具体阐述本发明的基于hammerstein模型的cstr反 应器控制方法的应用过程。
[0100]
在本发明的一个具体实施例中,参照cstr反应器的动态特性表达式, 在cstr反应器厌氧反应过程中,反应物a,即输入变量的流速f的初始值 f0以及反应物b,即输出变量的浓度cb的初始值c
b0
是已知量,并且初始值 f0和初始值c
b0
可作为cstr反应器厌氧反应过程中的特征参数的初始值。其 中,特征参数初始值表示在一个稳态工作点对应的稳态值。
[0101]
进一步地,可对初始值f0和初始值c
b0
进行归一化处理,可得到流速 f
′
=(f-f0)/
f0,即f
′
=(f-34.3)/34.3、以及浓度cb′
=(c
b-c
b0
)/c
b0
,即 cb′
=(c
b-1.12)/1.12,并可将流速f
′
=(f-34.3)/34.3、浓度cb′
=(c
b-1.12)/1.12代 入hammerstein模型,hammerstein模型的具体表达式为:
[0102]
v(k)=f(f
′
(k))
[0103][0104]
其中,cb′
(k)表示cstr反应器的系统输出,f
′
(k)表示cstr反应器的系 统输入。
[0105]
此外,对于用于拟合hammerstein模型中静态非线性模块的神经模糊模型, 其输入层的输入信号,即输入变量可为f=(f-f0)/f0,即f
′
=(f-34.3)/34.3, 高斯隶属度函数层的隶属度函数可为:
[0106][0107]
其中,l为模糊规则数,c
l
为隶属度函数 的中心,σ
l
为隶属度函数的宽度。
[0108]
此外,对于用于拟合hammerstein模型中静态非线性模块的神经模糊模型, 其输出层的输出信号,即输出变量可为:
[0109][0110]
其中,w
l
(l=1,
…
,l)为神经模糊模型的权重。
[0111]
进一步地,可选用200组幅值为0或0.5的二进制信号,以及400组幅值 为[-1,1]均匀分布的随机信号,构成组合式信号源。其中,当cstr反应器的 系统输入f
′
(k)为可分离信号,即二进制信号时,可利用cstr反应器的二进 制系统输入f
′
(k)分离静态非线性模块和动态线性模块的参数。
[0112]
进一步地,可利用cstr反应器的二进制信号的输入输出数据,即二进 制输入f
′
(k)和二进制输出cb′
(k),以及lipschitz商准则和最小二乘法辨识动态 线性模块的参数,由此,可确定传递函数模型的阶次,即na的值为1,nb的值 为1,并且确定动态线性模块的未知参数即
[0113]
进一步地,可利用cstr反应器的随机信号、聚类算法、辅助误差和概 率密度函数辨识静态非线性模块的参数,由此,可确定神经模糊模型的隶属 度函数中心c
l
、隶属度函数宽度σ
l
,以及神经模糊模型的权重w
l
。
[0114]
进一步地,可利用辨识后的hammerstein模型中静态非线性模块的可逆原 理得到cstr反应器的线性控制模型,以控制cstr反应器的反应过程。
[0115]
本发明的有益效果如下:
[0116]
(1)本发明通过采用组合信号源实现hammerstein模型的静态非线性模 块和动态
线性模块的参数分离,不仅简化参数辨识过程,还降低了计算难度;
[0117]
(2)本发明通过采用辅助误差和概率密度函数辨识静态非线性模块的参 数,不仅能够控制模型误差的空间状态分布,保证误差分布趋于正态分布, 还能够提高模型的精度;
[0118]
(3)本发明通过利用hammerstein模型的特殊结构将cstr反应器的非 线性控制问题转化为线性控制问题,简化了控制设计。
[0119]
下面将结合图5(a)和图5(b),进一步说明本发明的基于hammerstein 模型的cstr反应器控制方法的有益效果。
[0120]
举例而言,可设置线性控制模块,即pi控制器的控制参数kc=0.65,τi=3.8, 浓度的目标值设定为-0.5,参照图5(a)可知,本发明的基于hammerstein模 型的cstr反应器控制方法的控制过程,其响应速度快且超调量小,能够取 得较好的控制效果;参照图5(b)可知,本发明的基于hammerstein模型的 cstr反应器控制方法的控制过程,随着反应物的浓度接近设定值后,反应物 的流速也逐渐趋于稳定,由此,可看出本发明的基于hammerstein模型的cstr 反应器控制方法,具有较高的控制精度。
[0121]
对应上述实施例的基于hammerstein模型的cstr反应器控制方法,本发 明还提出了一种基于hammerstein模型的cstr反应器控制装置。
[0122]
如图6所示,本发明实施例的基于hammerstein模型的cstr反应器控制 装置包括建模模块10、辨识模块20、处理模块30和控制模块40。其中,建 模模块10用于构建cstr反应器的hammerstein模型,其中,hammerstein 模型包括静态非线性模块和动态线性模块;辨识模块20用于辨识hammerstein 模型中静态非线性模块和动态线性模块的参数;处理模块30用于利用辨识后 的hammerstein模型中静态非线性模块的可逆原理得到cstr反应器的线性控 制模型;控制模块40用于根据cstr反应器的线性控制模型控制cstr反应 器的反应过程。
[0123]
在本发明的一个实施例中,建模模块10可具体用于采用神经模糊模型拟 合hammerstein模型的静态非线性模块,并可采用传递函数模型拟合 hammerstein模型的动态线性模块。
[0124]
在本发明的一个实施例中,神经模糊模型可为四层神经模型,其中,神 经模糊模型的第一层可为输入层,神经模糊模型的第二层可为高斯隶属度函 数层,神经模糊模型的第三层可为模糊规则层,神经模糊模型的第四层可为 输出层。其中,神经模糊模型还包括rbf(径向基)神经网络和模糊神经网 络。
[0125]
具体地,神经模糊模型的第一层,即输入层可用于接收输入信号,例如 输入变量u(t),并可将输入信号,例如输入变量u(t)直接传递至神经模糊模型 的第二层,即高斯隶属度函数层
[0126]
其中,神经模糊模型的第二层,即高斯隶属度函数层可采用下列公式计 算接收到的输入信号,例如输入变量u(t)的隶属度函数:
[0127]
[0128]
其中,l为模糊规则数,c
l
为隶属度函数的中 心,σ
l
为隶属度函数的宽度。
[0129]
此外,需要说明的是,神经模糊模型的第三层,即模糊规则层中的每个 每个神经元表示一条模糊规则,由此可确定隶属度函数中l,即模糊规则数的 数量。
[0130]
进一步地,计算得到输入信号,例如输入变量u(t)的隶属度函数后,可通 过神经模糊模型的第四层,即输出层输出,具体可通过神经模糊模型的第四 层,即输出层的单个神经元输出信号进行表示:
[0131][0132]
其中,w
l
(l=1,
…
,l)为神经模糊模型的权重。
[0133]
在本发明的一个实施例中,传递函数模型可为:
[0134][0135][0136][0137]
其中,z-1
表示单位后移算子,ai(i=1,2,
…
,na)、bj(j=1,2,
…
,nb)分别表示 未知参数。
[0138]
由此,可得到cstr反应器的hammerstein模型的表达式为:
[0139]
v(k)=f(u(k))
[0140]
y(k)=l(
·
)v(k)
[0141]
其中,k表示采样时间,y(k)表示cstr反应器的系统输出,u(k)表示cstr 反应器的系统输入,v(k)表示静态非线性模块输出,表示动态线性模 块输出。
[0142]
在本发明的一个实施例中,辨识模块20可具体用于:
[0143]
s201,获取cstr反应器反应过程的组合式信号源,其中,组合式信号 源包括可分离信号和随机信号。
[0144]
具体地,组合式信号源中的可分离信号可为二进制信号。
[0145]
s202,利用可分离信号分离静态非线性模块和动态线性模块的参数。
[0146]
具体地,可利用可分离信号,即二进制信号不激发静态非线性模块的特 性,以将hammerstein模型中静态非线性模块和动态线性模块的参数分离。需 要说明的是,可分离信号,即二进制信号经过静态非线性模块后,得到的输 出信号与输入信号将保持同频率不同幅值,即v(k)=a0u(k)(a0为常量),由 此,可利用该特性实现静态非线性模块与动态线性模块的分离。通过分离静 态非线性模块和动态线性模块的参数,能够简化参数辨识过程,从而降低参 数辨识难度。
[0147]
s203,利用可分离信号、lipschitz商准则和最小二乘法辨识动态线性模 块的参数。
[0148]
具体地,基于可分离信号,即二进制信号的输入输出数据,可利用lipschitz 商准则确定传递函数模型的阶次,即na和nb的值,然后可利用最小二乘法辨 识动态线性模块的未知参数,即ai(i=1,2,
…
,na)和bj(j=1,2,
…
,nb)。
[0149]
更具体地,利用最小二乘法辨识动态线性模块的未知参数的具体计算表 达可为:
[0150][0151]
其中,其中, p
l
为可分离信号,即二进制信号的输入输出数据的数目。
[0152]
s204,利用随机信号、聚类算法、辅助误差和概率密度函数辨识静态非 线性模块的参数。
[0153]
具体地,基于随机信号的输入输出数据,可利用聚类算法计算神经模糊 模型的隶属度函数中心c
l
和隶属度函数宽度σ
l
,在此基础上,可利用辅助误 差和概率密度函数更新神经模糊模型的权重w
l
。
[0154]
更具体地,上述利用聚类算法计算神经模糊模型的隶属度函数的中心c
l
和隶属度函数的宽度σ
l
的步骤,还可包括以下步骤:可将随机信号的输入数 据u(1)作为第一聚类,并可设第一聚类的聚类中心c1=u(1),进一步地,可将 随机信号中的第k个输入数据u(k),根据相似性判据 (n表示随机信号的输入数据的总数,e表示指数函数)计算第k个输入数据 u(k)的与每一个聚类中心的相似性,从而判断是否增加新的聚类,并按照调整聚类中心(n
l
表示属于第l个聚类的数目,λ∈[0,1] 表示可调参数),重复执行该步骤直到随机信号中的所有输入数据都被分配 到相应的聚类为止,然后可根据计算隶属度函数的宽度σ
l (ρ表示交叠参数,通常取1≤ρ≤2)。
[0155]
更具体地,上述利用辅助误差和概率密度函数更新神经模糊模型的权重 w
l
的过程,还可包括以下步骤:可先根据cstr反应器的系统输出y(k)计算 系统误差并可将系统误差导入到基于辅助误差模型的自适 应系统中,从而可得到辅助误差e1(k),然后可累积存储辅助误差e1(k)并产生 辅助误差序列集,进而可利用概率密度函数对辅助误差序列集进行估计,从 而可得到相应的估计值γ
error
(γ),进而可在此基础上定义均方准则函数j,最 后可通过更新神经模糊模型的权重w
l
,直至辅助误差概率密度函数跟踪给定 的目标概率密度函数。
[0156]
其中,辅助误差e1(k)的计算公式具体如下:
[0157][0158]
其中,α和β是常量,其中,α和β是常量,
[0159]
其中,估计值γ
error
(γ)的计算公式具体如下:
[0160][0161]
其中,表示窗宽。
[0162]
其中,均方准则函数j的计算公式具体如下:
[0163][0164]
综上可知,在辨识hammerstein模型的过程中,需要遍历所有的输入变量, 即可分离信号的输入输出数据和随机信号的输入输出数据,从而得到动态线 性模型的参数和静态非线性模型的参数,具体如图3所示:
[0165]
s201,获取cstr反应器反应过程的组合式信号源,其中,组合式信号 源包括可分离信号和随机信号;
[0166]
s202,利用可分离信号分离静态非线性模块和动态线性模块的参数;
[0167]
s2031,利用可分离信号,即二进制信号和lipschitz商准则辨识动态线性 模型中传递函数模型的阶次;
[0168]
s2032,最小二乘法辨识动态线性模块的未知参数
[0169]
s2041,初始化k=1;
[0170]
s2042,归一化处理随机信号的输入输出数据;
[0171]
s2043,利用聚类算法计算神经模糊模型的隶属度函数的中心c
l
和隶属度 函数的宽度σ
l
;
[0172]
s2044,利用辅助误差和概率密度函数更新神经模糊模型的权重w
l
;
[0173]
s2045,更新模型参数;
[0174]
s2046,判断是否遍历随机信号中的所有输入输出数据,若是,则结束辨 识过程,若否,则返回执行步骤s2042。
[0175]
在本发明的一个实施例中,处理模块30可具体用于基于辨识后的 hammerstein模型,利用其静态非线性模块的逆函数f-1
(
·
)将cstr反应器的非 线性控制转换为线性控制,并确定cstr反应器的线性控制模型。其中,cstr 反应器的线性控制模型可为pi控制器。
[0176]
在本发明的一个实施例中,控制模块40可具体采用cstr反应器的线性 控制模型,即pi控制器控制cstr反应器厌氧反应过程中的反应物b,即输 出变量的浓度cb。更具体地,如图4所示,可根据参考轨迹为线性控制模块 40,即pi控制器输入设定值,例如设置线性控制模块40,即pi控制器的控 制参数kc=0.65,τi=3.8,浓度的目标值设定为-0.5,进而可利用其静态非线 性模块的逆函数f-1
(
·
)将cstr反应器的非线性控制转换为线性控制,以控制 cstr反应器的输出。
[0177]
下面将结合根据cstr反应器的动态特性表达式得到的反应物a,即输入 变量的流速f的初始值f0=34.3(l/h)以及反应物b,即输出变量的浓度cb的 初始值c
b0
=1.12(mol/l),具体阐述本发明的基于hammerstein模型的cstr反 应器控制装置的工作过程。
[0178]
在本发明的一个具体实施例中,参照cstr反应器的动态特性表达式, 在cstr反应器厌氧反应过程中,反应物a,即输入变量的流速f的初始值 f0以及反应物b,即输出变量的浓度cb的初始值c
b0
是已知量,并且初始值 f0和初始值c
b0
可作为cstr反应器厌氧反应过程中的特征参数的初始值。其 中,特征参数初始值表示在一个稳态工作点对应的稳态值。
[0179]
进一步地,可对初始值f0和初始值c
b0
进行归一化处理,可得到流速 f
′
=(f-f0)/f0,即f
′
=(f-34.3)/34.3、以及浓度cb′
=(c
b-c
b0
)/c
b0
,即 cb′
=(c
b-1.12)/1.12,并可将流速f
′
=(f-34.3)/34.3、浓度cb′
=(c
b-1.12)/1.12代 入hammerstein模型,hammerstein模型的具体表达式为:
[0180]
v(k)=f(f
′
(k))
[0181][0182]
其中,cb′
(k)表示cstr反应器的系统输出,f
′
(k)表示cstr反应器的系 统输入。
[0183]
此外,对于用于拟合hammerstein模型中静态非线性模块的神经模糊模型, 其输入层的输入信号,即输入变量可为f=(f-f0)/f0,即f
′
=(f-34.3)/34.3, 高斯隶属度函数层的隶属度函数可为:
[0184][0185]
其中,l为模糊规则数,c
l
为隶属度函数 的中心,σ
l
为隶属度函数的宽度。
[0186]
此外,对于用于拟合hammerstein模型中静态非线性模块的神经模糊模型, 其输出层的输出信号,即输出变量可为:
[0187][0188]
其中,w
l
(l=1,
…
,l)为神经模糊模型的权重。
[0189]
进一步地,可选用200组幅值为0或0.5的二进制信号,以及400组幅值 为[-1,1]均匀分布的随机信号,构成组合式信号源。其中,当cstr反应器的 系统输入f
′
(k)为可分离信
号,即二进制信号时,可利用cstr反应器的二进 制系统输入f
′
(k)分离静态非线性模块和动态线性模块的参数。
[0190]
进一步地,可利用cstr反应器的二进制信号的输入输出数据,即二进 制输入f
′
(k)和二进制输出cb′
(k),以及lipschitz商准则和最小二乘法辨识动态 线性模块的参数,由此,可确定传递函数模型的阶次,即na的值为1,nb的值 为1,并且确定动态线性模块的未知参数即
[0191]
进一步地,可利用cstr反应器的随机信号、聚类算法、辅助误差和概 率密度函数辨识静态非线性模块的参数,由此,可确定神经模糊模型的隶属 度函数中心c
l
、隶属度函数宽度σ
l
,以及神经模糊模型的权重w
l
。
[0192]
进一步地,可利用辨识后的hammerstein模型中静态非线性模块的可逆原 理得到cstr反应器的线性控制模型,以控制cstr反应器的反应过程。
[0193]
本发明的有益效果如下:
[0194]
(1)本发明通过采用组合信号源实现hammerstein模型的静态非线性模 块和动态线性模块的参数分离,不仅简化参数辨识过程,还降低了计算难度;
[0195]
(2)本发明通过采用辅助误差和概率密度函数辨识静态非线性模块的参 数,不仅能够控制模型误差的空间状态分布,保证误差分布趋于正态分布, 还能够提高模型的精度;
[0196]
(3)本发明通过利用hammerstein模型的特殊结构将cstr反应器的非 线性控制问题转化为线性控制问题,简化了控制设计。
[0197]
下面将结合图5(a)和图5(b),进一步说明本发明的基于hammerstein 模型的cstr反应器控制装置的有益效果。
[0198]
举例而言,可设置线性控制模块40,即pi控制器的控制参数kc=0.65, τi=3.8,浓度的目标值设定为-0.5,参照图5(a)可知,本发明的基于 hammerstein模型的cstr反应器控制装置的控制过程,其响应速度快且超调 量小,能够取得较好的控制效果;参照图5(b)可知,本发明的基于hammerstein 模型的cstr反应器控制装置的控制过程,随着反应物的浓度接近设定值后, 反应物的流速也逐渐趋于稳定,由此,可看出本发明的基于hammerstein模型 的cstr反应器控制装置,具有较高的控制精度。
[0199]
在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能 理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此, 限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个 该特征。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0200]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示 例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描 述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例 中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例 或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个 实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域 的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示 例的特征进行结合和组合。
[0201]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而 言,可以
理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行 多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限 定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。