1.本发明涉及机器人技术领域,具体为一种基于混合导航移动的机器人。
背景技术:
2.随着信息化的发展,智能机器人被应用与各大场合,在现代化商场中,也往往设置有商场机器人,用于迎宾接待、促销、互动,以及对商场各类信息的展示。然而现代商场机器人在移动过程中,导航系统定位精度差,直接通过rfid的位置定位进行确定机器人的位置,然而通过单个rfid的定位探测方式计算精度低,导致移动的机器人在前进过程中,往往会发生移动路线偏移规划路线,影响导航精度,纠偏效果差。通常在需要规避障碍物时,需要重新计算整条行径路线,极大影响对障碍物的规避处理速度。
技术实现要素:
3.针对现有技术的不足,本发明提供了一种基于混合导航移动的机器人,具备导航精度高,有效保证机器人行驶的路线精准性,同时提高对障碍物的规避速度,进一步提高导航效果的优点。
4.为实现上述目的,本发明提供如下技术方案:一种基于混合导航移动的机器人,包括机器本体,机器本体的内部设置有混合导航系统,机器本体的底部设置有用于移动的驱动装置,驱动装置和混合导航系统信号连接,机器本体的正面外部固定安装有摄像头,所述混合导航系统包括图像导航系统和信号导航系统,图像导航系统和信号导航系统用于对外界信息的采集,图像导航系统和信号导航系统均与导航规划系统信号连接,导航规划系统用于对外界采集信息的计算和处理,确定机器本体的行驶路径;
5.所述图像导航系统包括图像采集模块、图像识别模块和图像传输模块;
6.图像采集模块与摄像头信号信息连接,摄像头用于将采集机器本体的前方图像,并将图像信息传输给图像采集模块;
7.图像识别模块,用于识别图像采集模块的采集图像,对图像进行分析,确定图像种类;
8.图像传输模块,用于将图像信息传输给导航规划系统;
9.所述信号导航系统包括信号发射模块、信号接收模块和信号传输模块;
10.信号发射模块设置为分布在外界地面的导航定位基点,信号发射模块设置为射频标签读写器;
11.信号接收模块为射频信号接收系统,信号接收模块设在机器本体的内部,信号接收模块用于确定射频标签读写器与机器本体的位置及距离;
12.信号传输模块,用于将信号信息传输给导航规划系统;
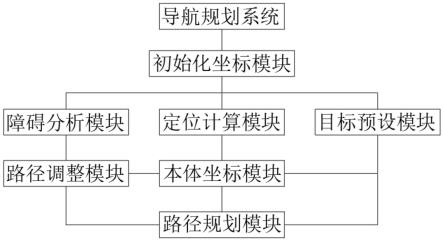
13.所述导航规划系统包括初始化坐标模块、定位计算模块、车体坐标模块、目标预设模块、路径规划模块、障碍分析模块、路径调整模块;
14.初始化坐标模块,用于建立建筑平面坐标系;
15.定位计算模块,用于计算信号接收模块的位置坐标;
16.本体坐标模块,根据计算的位置坐标,确定机器本体在建筑平面坐标系中的坐标;
17.目标预设模块,与机器本体的外设输入设备连接,用于确定机器本体的移动目标,包括巡航移动、目标地点移动范围区域移动;
18.路径规划模块,根据机器本体的初始化坐标位置和预设的移动目标,确定行径路线;
19.障碍分析模块,接收图像传输模块的图像信息,确定机器本体的前方是否存在障碍物;
20.路径调整模块和障碍分析模块信息连接,在障碍分析模块确定障碍物信息时,对行径路线进行调整,并形成障碍调整行径路线,障碍调整行径路线为障碍路段的规避路线,障碍调整行径路线的终点与规划行径线重合。
21.进一步的,所述摄像头至少设置有两组,分别位于机器本体的正面顶部位置和正面底部位置,且机器本体的正面顶部或底部至少有一组摄像头。
22.进一步的,所述图像识别模块接收图像采集模块传递图像信息,对多组摄像头的图像信息进行整理,确定机器本体正面空间的图像信息,根据图像信息,确定机器本体正面空间的物体,同时根据多个摄像头的摄像方位,计算物体与机器本体的距离。
23.进一步的,所述信号发射模块根据建筑平面空间具体建筑物分布范围进行布置,主要为布置在可行驶路径两侧,同时记录信号发射模块位于建筑平面空间内的位置信息。
24.进一步的,所述初始化坐标模块以建筑平面空间形成二维坐标系,同时在坐标系中输入建筑物分布信息,确定建筑物及可行路径的分布,信号发射模块纳入坐标中,根据信号发射模块位于建筑平面空间内的位置信息确定每个信号发射模块的坐标信息。
25.进一步的,所述定位计算模块通过信号传输模块获取信号接收模块的接收信号信息,并确定距离最短距离的三个信号发射模块的坐标信息为,z1(x1,y1)、z2(x2,y2)、z3(x3,y3),机器本体与三个信号发射模块的距离信息为r1、r2、r3,根据三个信号发射模块的距离交汇位置为机器本体的实际位置,机器本体的坐标设定为j1(xi,yi),则z1j与z1z2的夹角为θ,其中:
[0026][0027][0028]
计算j1坐标与z1的水平距离为l1:
[0029]
l1=r2*cosθ
[0030]
计算j1坐标与z1的垂直距离为h1:
[0031]
h1=r2*sinθ
[0032]
其中在计算j坐标位置时,z3用于排除干扰位置信息。
[0033]
进一步的,所述本体坐标模块根据定位计算模块计算信息,确定机器本体的坐标信息为j1,其中坐标为:
[0034]
j1=(x1 l1,y1 h1)
[0035]
同时记录机器本体在移动的动态坐标集j={j1,j2,...,jn},ji表示在第i个位置机器本体的坐标。
[0036]
进一步的,所述路径调整模块还包括对机器本体的移动路线微调,以机器本体的移动坐标集在建筑平面空间形成的二维坐标系中构建移动路线,确定移动路线与确定规划路线的重合度,在机器本体的移动路线与规划路线偏离时,路径调整模块用于确定临时调整路线,临时调整路线用于控制机器本体移动至规划行径路线。
[0037]
有益效果:
[0038]
该基于混合导航移动的机器人,通过信号导航系统对建筑平面空间二维坐标系进行精细化标记,利用信号发射模块和信号接收模块的信号接收配合,达到定位机器本体的效果,保证机器本体行驶路径的准确性,通过图像导航系统对机器本体前方景象进行监测,达到准确规避障碍物的效果,通过混合导航的方式,有效保证机器人行驶的路线精准性,同时提高对障碍物的规避效果。
[0039]
该基于混合导航移动的机器人,通过定位计算模块确定距离最短距离的三个信号发射模块的坐标信息和机器本体与三个信号发射模块的距离信息,以三个信号发射模块的距离交汇位置为机器本体的实际位置,以三个信号发射模块计算机器本体的位置,与现有的通过单个射频标签读写器进行位置确定,有效保证机器本体的位置的准确性,从而保证行驶路径的准确性。
[0040]
该基于混合导航移动的机器人,以机器本体的移动坐标集在建筑平面空间形成的二维坐标系中构建移动路线,确定移动路线与确定规划路线的重合度,在机器本体的移动路线与规划路线偏离时,路径调整模块用于确定临时调整路线,临时调整路线用于控制机器本体移动至规划行径路线。并通过路径调整模块制定障碍调整行径路线,障碍调整行径路线为障碍路段的规避路线,不必整体规划整条行径路线,从而提高对障碍物的规避计算速度,有效提高混合导航效果。
附图说明
[0041]
图1为本发明结构机器本体示意图;
[0042]
图2为本发明混合导航系统示意图;
[0043]
图3为本发明图像导航系统示意图;
[0044]
图4为本发明信号导航系统示意图;
[0045]
图5为本发明导航规划系统示意图;
[0046]
图6为本发明机器本体定位坐标系示意图;
[0047]
图7为本发明机器本体计算示意图;
[0048]
图8为本发明建筑平面空间二维坐标系及障碍物规避调整示意图。
[0049]
图中:1、机器本体;2、驱动装置;3、摄像头。
具体实施方式
[0050]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0051]
实施例
[0052]
请参阅图1-2,一种基于混合导航移动的机器人,包括机器本体1,机器本体1的内部设置有混合导航系统,机器本体1的底部设置有用于移动的驱动装置2,驱动装置2和混合导航系统信号连接,机器本体1的正面外部固定安装有摄像头3,混合导航系统包括图像导航系统和信号导航系统,图像导航系统和信号导航系统用于对外界信息的采集,图像导航系统和信号导航系统均与导航规划系统信号连接,导航规划系统用于对外界采集信息的计算和处理,确定机器本体1的行驶路径;
[0053]
参考图3,图像导航系统包括图像采集模块、图像识别模块和图像传输模块;
[0054]
图像采集模块与摄像头3信号信息连接,摄像头3用于将采集机器本体1的前方图像,并将图像信息传输给图像采集模块;摄像头3至少设置有两组,分别位于机器本体1的正面顶部位置和正面底部位置,且机器本体1的正面顶部或底部至少有一组摄像头3。
[0055]
参考图4,图像识别模块接收图像采集模块传递图像信息,对多组摄像头3的图像信息进行整理,确定机器本体1正面空间的图像信息,根据图像信息,确定机器本体1正面空间的物体,同时根据多个摄像头3的摄像方位,计算物体与机器本体1的距离。
[0056]
图像识别模块,用于识别图像采集模块的采集图像,对图像进行分析,确定图像种类;
[0057]
图像传输模块,用于将图像信息传输给导航规划系统;
[0058]
参考图5,信号导航系统包括信号发射模块、信号接收模块和信号传输模块;
[0059]
信号发射模块设置为分布在外界地面的导航定位基点,信号发射模块设置为射频标签读写器;信号发射模块根据建筑平面空间具体建筑物分布范围进行布置,主要为布置在可行驶路径两侧,同时记录信号发射模块位于建筑平面空间内的位置信息。
[0060]
信号接收模块为射频信号接收系统,信号接收模块设在机器本体1的内部,信号接收模块用于确定射频标签读写器与机器本体1的位置及距离;
[0061]
信号传输模块,用于将信号信息传输给导航规划系统;
[0062]
导航规划系统包括初始化坐标模块、定位计算模块、车体坐标模块、目标预设模块、路径规划模块、障碍分析模块、路径调整模块;
[0063]
参考图8,初始化坐标模块,用于建立建筑平面坐标系;初始化坐标模块以建筑平面空间形成二维坐标系,同时在坐标系中输入建筑物分布信息,确定建筑物及可行路径的分布,信号发射模块纳入坐标中,根据信号发射模块位于建筑平面空间内的位置信息确定每个信号发射模块的坐标信息。
[0064]
参考图6-7,定位计算模块,用于计算信号接收模块的位置坐标;
[0065]
其中,定位计算模块通过信号传输模块获取信号接收模块的接收信号信息,并确定距离最短距离的三个信号发射模块的坐标信息为,z1x1,y1、z2x2,y2、z3x3,y3,机器本体1与三个信号发射模块的距离信息为r1、r2、r3,根据三个信号发射模块的距离交汇位置为机器本体1的实际位置,机器本体1的坐标设定为j1xi,yi,则z1j与z1z2的夹角为θ,其中:
[0066][0067][0068]
计算j1坐标与z1的水平距离为l1:
[0069]
l1=r2*cosθ
[0070]
计算j1坐标与z1的垂直距离为h1:
[0071]
h1=r2*sinθ
[0072]
其中在计算j坐标位置时,z3用于排除干扰位置信息。
[0073]
本体坐标模块,根据计算的位置坐标,确定机器本体1在建筑平面坐标系中的坐标;
[0074]
其中,本体坐标模块根据定位计算模块计算信息,确定机器本体1的坐标信息为j1,其中坐标为:
[0075]
j1=(x1 l1,y1 h1)
[0076]
同时记录机器本体1在移动的动态坐标集j={j1,j2,...,jn},ji表示在第i个位置机器本体1的坐标。
[0077]
目标预设模块,与机器本体1的外设输入设备连接,用于确定机器本体1的移动目标,包括巡航移动、目标地点移动范围区域移动;
[0078]
路径规划模块,根据机器本体1的初始化坐标位置和预设的移动目标,确定行径路线;
[0079]
障碍分析模块,接收图像传输模块的图像信息,确定机器本体1的前方是否存在障碍物;
[0080]
参考图8,路径调整模块和障碍分析模块信息连接,在障碍分析模块确定障碍物信息时,对行径路线进行调整,并形成障碍调整行径路线,障碍调整行径路线为障碍路段的规避路线,障碍调整行径路线的终点与规划行径线重合。
[0081]
其中,路径调整模块还包括对机器本体1的移动路线微调,以机器本体1的移动坐标集在建筑平面空间形成的二维坐标系中构建移动路线,确定移动路线与确定规划路线的重合度,在机器本体1的移动路线与规划路线偏离时,路径调整模块用于确定临时调整路线,临时调整路线用于控制机器本体1移动至规划行径路线。
[0082]
其具体步骤为:
[0083]
s1、初始化坐标模块建立建筑平面坐标系;初始化坐标模块以建筑平面空间形成二维坐标系,同时在坐标系中输入建筑物分布信息,确定建筑物及可行路径的分布,信号发射模块纳入坐标中,根据信号发射模块位于建筑平面空间内的位置信息确定每个信号发射模块的坐标信息;
[0084]
s2、目标预设模块确定机器本体1的移动目标,包括巡航移动、目标地点移动范围区域移动;
[0085]
s3、定位计算模块计算信号接收模块的位置坐标;
[0086]
s4、本体坐标模块接收定位计算模块的计算数据,根据计算的位置坐标,确定机器本体1在建筑平面坐标系中的坐标;
[0087]
s5、路径规划模块根据s4计算的机器本体1的初始化坐标位置和s2预设的移动目标,确定行径路线;
[0088]
s6、机器本体1接收路径规划模块的规划路线,机器本体1启动驱动装置2,驱动装置2带动机器本体1沿规划行径路线行驶;
[0089]
s7、路径调整模块对机器本体1的移动路线微调,以机器本体1的移动坐标集在建筑平面空间形成的二维坐标系中构建移动路线,确定移动路线与确定规划路线的重合度,在机器本体1的移动路线与规划路线偏离时,路径调整模块用于确定临时调整路线,临时调整路线用于控制机器本体1移动至规划行径路线;
[0090]
s8、图像采集模块通过摄像头动态采集机器本体1的前部景象;
[0091]
s9、图像识别模块接收图像采集模块传递图像信息,对多组摄像头3的图像信息进行整理,确定机器本体1正面空间的图像信息,根据图像信息,确定机器本体1正面空间的物体,同时根据多个摄像头3的摄像方位,计算物体与机器本体1的距离;
[0092]
s10、图像传输模块将图像识别模块处理的图像信息传输给障碍分析模块;
[0093]
s11、障碍分析模块接收图像传输模块的图像信息,确定机器本体1的前方是否存在障碍物,当障碍分析模块确定机器本体1前方存在障碍物时,进行s12;
[0094]
s12、路径调整模块根据图像识别模块的识别障碍物分析,进行规避障碍物的路径计算,并形成障碍调整行径路线,障碍调整行径路线为障碍路段的规避路线,障碍调整行径路线的终点与规划行径线重合。
[0095]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
