1.本发明涉及动力定位船舶推力分配技术领域,具体涉及一种自校正的动力定位船舶推力分配方法。
背景技术:
2.随着海洋资源的探索和开发,促进了海洋装备技术的发展,船舶动力定位系统已经成为高技术含量海洋工程船的不可或缺装备,在海洋探索和开发过程中发挥着重要作用。推力分配又是船舶动力定位系统的重要组成部分,它是将动力定位系统控制器的期望推力和力矩输出信号合理分配到各个推进器,同时要考虑尽可能的降低能耗、降低推进器的机械磨损和避免船舶奇异性等。目前对动力定位系统推力分配模型构建主要包含能耗、机械磨损、松弛变量和奇异性,实际运用中往往只考虑其中若干项,而且使用序列二次规划方法求解时需要把它们配成二次型,进而采取近似计算,这样造成计算结果偏差。本发明提出的推力分配方法考虑所有指标项,一方面提高能耗和奇异性指标的计算精度,另一方面通过自校正极大降低期望输出推力和力矩与实际输出推力和力矩的偏差,故该类方法能够提高船舶动力定位系统的定位精度以及可靠性,灵活的优化各种性能指标。
技术实现要素:
3.针对以上问题,本发明提供了一种自校正的动力定位船舶推力分配方法,能够提高船舶动力定位系统的定位精度以及可靠性,灵活的优化各种性能指标。
4.为了实现上述目的,本发明采用的技术方案如下:
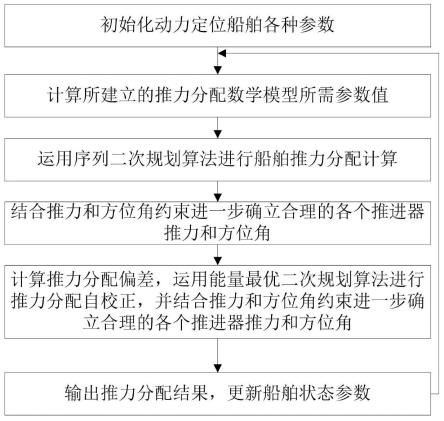
5.一种自校正的动力定位船舶推力分配方法,包括如下步骤:
6.步骤1、根据动力定位船舶对象实际情况初始化各种参数(包括船舶结构参数、船舶状态参数、船舶物理条件约束参数和权值参数);
7.步骤2、根据动力定位船舶的各种参数值计算所建立的推力分配数学模型所需参数值,具体如下;
[0008][0009]
式中h是二次项权系数对角矩阵,f是一次项权系数向量,x是优化变量,a
eq
和b
eq
分别为等式约束矩阵和向量,lb和ub为优化变量的边界,具体如下式所示:
[0010]
x=[δt1,
…
,δti,
…
,δtn,δα1,
…
,δαi,
…
,δαn,s1,s2,s3]
t
,1≤i≤n
[0011]
式中n是推进器个数,δti是第i个推进器的推力变化量,δαi是第i个推进器的方位角变化量,s1,s2,s3是松弛变量,
[0012][0013]
式中b(α
p
)为前一时刻的推进器配置控制矩阵,t为当前时刻推进器的推力,α
p
为前一时刻的推进器方位角,t
p
为前一时刻的推进器推力,e3为三阶单位矩阵,
[0014]beq
=τ-b(α
p
)t
p
[0015]
式中τ为控制系统输出的推力和力矩指令,
[0016]
lb=[δt
1min
,
…
,δt
imin
,
…
,δt
nmin
,δα
1min
,
…
,δα
imin
,
…
,δα
nmin
,[],[],[]]
t
[0017]
式中δt
imin
是第i个推进器允许的推力最小变化量,δα
imin
第i个推进器允许的方位角最小变化量,
[0018]
ub=[δt
1max
,
…
,δt
imax
,...,δt
nmax
,δα
1max
,...,δα
imax
,...,δα
nmax
,[],[],[]]
t
[0019]
式中δt
imax
是第i个推进器允许的推力最大变化量,δα
imax
第i个推进器允许的方位角最大变化量;
[0020]
步骤3、根据步骤2计算结果运用序列二次规划算法进行船舶推力分配计算;
[0021]
步骤4、根据推力分配结果结合推力和方位角约束进一步确立合理的各推进器推力和方位角;
[0022]
步骤5、根据步骤4计算推力分配偏差,运用能量最优二次规划算法进行推力分配自校正,并结合推力和方位角约束进一步确立合理的各推进器推力和方位角,具体实施方法如下:
[0023]
步骤5.1、根据步骤4获得的各个推进器推力和方位角计算推进系统的推力和力矩;
[0024]
步骤5.2、计算控制系统输出的推力和力矩指令与步骤5.1所得推进系统的推力和力矩之间的误差值为δτ;
[0025]
步骤5.3、保持步骤4中各推进器方位角不变,运用能量最优二次规划算法计算各推进器的推力变化量δt,具体计算方法如下式:
[0026]
δt=w-1
b(α)
t
(b(α)w-1bt
(α))-1
δτ
[0027]
其中w为功率与推力关系参数矩阵,b(α)为当前推进器配置控制矩阵;
[0028]
步骤5.4、根据步骤5.3的各推进器推力变化量计算各推进器推力值,并根据各推进器推力约束条件确定最终各推进器的推力值;
[0029]
步骤6、输出推力分配结果,更新船舶状态参数,跳至步骤2进行下一个周期推力分配计算。
[0030]
优选地,所述步骤2中,二次项权系数对角矩阵h具体计算方法如下:
[0031]
设第i个推进器的二次项能耗权值系数参数为k
swi
,则:
[0032][0033]
式中wi为第i个推进器的功率与推力关系参数,t
pi
为第i个推进器前一时刻的推进器推力,ε1为极小常数值防止分母为0,
[0034]
设二次项机械磨损和奇异性综合权系数参数为o
qs
,则:
[0035][0036]
式中ω和q
sd
分别为机械磨损权系数和二次项奇异性权系数,ρ为常数项系数,
[0037]
由此可得:
[0038][0039]
式中q为松弛变量权系数。
[0040]
优选地,所述步骤2中,一次项权系数向量f具体计算方法如下:
[0041]
f=[k
fw1
,
…
,k
fwi
,
…
,k
fwn
,q
f1
×
2ρ,
…
,q
fi
×
2ρ,
…
,q
fn
×
2ρ,0,0,0]
[0042]
式中k
fw
为一次项能耗权值系数,qf为一次项奇异性权系数,
[0043][0044]
优选地,所述步骤2中,奇异性权系数具体计算方法如下:
[0045]
u(α)=det(b(α)b
t
(α)),a
pi
=l
xi sinα
pi-l
yi cosα
pi
,a'
pi
=l
xi cosα
pi
l
yi sinα
pi
,
[0046]
式中l
xi
,l
yi
为第i个推进器的船体坐标,
[0047][0048]
则一次项奇异性权系数qf表示为:
[0049]
[0050]
式中ε2为极小常数值防止分母为0,
[0051][0052]
令u
p
=u(α
p
),则二次项奇异性权系数表示为:
[0053][0054]
本发明所述的一种自校正的动力定位船舶推力分配方法,具有以下有益效果:
[0055]
本发明通过全面考虑能耗、机械磨损、松弛变量和奇异性性能指标,并对期望输出推力和力矩进行二次分配,进而提高船舶动力定位系统的定位精度以及可靠性,灵活的优化推力分配各种性能指标。
附图说明
[0056]
图1是本发明的流程示意图;
[0057]
图2是本发明的纵向力输出曲线图;
[0058]
图3是本发明的横向力输出曲线图;
[0059]
图4是本发明的力矩输出曲线图;
[0060]
图5是本发明的推进器方位角输出曲线图;
[0061]
图6是本发明的推进器推力输出曲线图。
具体实施方式
[0062]
下面结合附图1-6和cybershipⅲ船模实例对本发明的技术方案进行详细说明:
[0063]
一种自校正的动力定位船舶推力分配方法,包括如下步骤:
[0064]
步骤1、根据动力定位船舶对象实际情况初始化各种参数(包括船舶结构参数、船舶状态参数、船舶物理条件约束参数和权值参数),具体参数如下所示:
[0065]
表1 推进器的部分参数:
[0066]
推进器位置(m)t
max
/t
min
(n)δt
max
/δt
min
(n)δα
max
/δα
min
(rad)k
pt
1号(-0.875,-0.123)
±
21.9
±
4.38
±
0.171.58442号(-0.875,0.123)
±
21.9
±
4.38
±
0.171.58443号(0.55,0)
±
10
±
2041.919
[0067]
各个推进器初始化推力大小为0,推进器1和推进器2的初始方位角为0,推进器3的方位角始终为1.57弧度;
[0068]
步骤2、根据动力定位船舶的各种参数值计算所建立的推力分配数学模型所需参数值,具体如下;
[0069][0070]
x=[δt1,δt2,δt3,δα1,δα2,s1,s2,s3]
t
,
[0071]
计算二次项权系数对角矩阵h、一次项权系数向量f、等式约束矩阵和向量a
eq
和b
eq
、优化变量的边界lb和ub的值,具体计算公式如下:
[0072][0073]
lb=[δt
1min
,δt
2min
,δt
3min
,δα
1min
,δα
2min
,[],[],[]]
t
[0074]
ub=[δt
1max
,δt
2max
,δt
3max
,δα
1max
,δα
2max
,[],[],[]]
t
[0075][0076]
f=[k
fw1
,k
fw2
,k
fw3
,q
f1
×
2ρ,q
f2
×
2ρ,0,0,0];
[0077]
步骤3、根据步骤2计算结果运用序列二次规划算法进行船舶推力分配计算;
[0078]
步骤4、根据推力分配结果结合推力和方位角约束进一步确立合理的各推进器推力和方位角;
[0079]
步骤5、根据步骤4计算推力分配偏差,运用能量最优二次规划算法进行推力分配自校正,并结合推力和方位角约束进一步确立合理的各推进器推力和方位角,具体实施方
法如下:
[0080]
步骤5.1、根据步骤4获得的各个推进器推力和方位角计算推进系统的推力和力矩;
[0081]
步骤5.2、计算控制系统输出的推力和力矩指令与步骤5.1所得推进系统的推力和力矩之间的误差值为δτ;
[0082]
步骤5.3、保持步骤4中各推进器方位角不变,运用能量最优二次规划算法计算各推进器的推力变化量δt,具体计算方法如下式:
[0083]
δt=w-1
b(α)
t
(b(α)w-1bt
(α))-1
δτ
[0084]
其中w为功率与推力关系参数矩阵,b(α)为当前推进器配置控制矩阵;
[0085]
步骤5.4、根据步骤5.3的各推进器推力变化量计算各推进器推力值,并根据各推进器推力约束条件确定最终各推进器的推力值;
[0086]
步骤6、输出推力分配结果,更新船舶状态参数,跳至步骤2进行下一个周期推力分配计算。
[0087]
结果说明:
[0088]
从图2、图3和图4可以看出,采取本发明推力分配方法输出的实际纵向力、横向力和力矩与控制系统期望的纵向力、横向力和力矩几乎相等,达到了非常好的推力分配效果,图5可以看出推进器1和推进器2的方位角变化相对平缓,说明本发明推力分配方法在降低机械磨损性能指标上达到了较好效果,此外由推进器1和推进器2的方位角变化数值也可以看出在避免奇异性方面也达到了预期目的,提高了船舶的机动性,图6可以看出除了在期望推力和力矩出现突变时,三个推进器的推力变化非常平缓,能够根据能耗权值系数去合理分配各个推进器的推力,达到降低能耗的需求。
[0089]
综上所述,本发明通过全面考虑能耗、机械磨损、松弛变量和奇异性性能指标,并对期望输出推力和力矩进行二次分配,进而提高船舶动力定位系统的定位精度以及可靠性,灵活的优化推力分配各种性能指标。
[0090]
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。