植入物回收驱动手柄及回收装置
1.交叉参考相关引用
2.本发明要求于2021年02月10日提交的题为“driving handle,apparatus and method for recapturing an implant”的美国临时申请第63/148,000号的优先权,以上申请的全部内容通过引用并入本发明中。
技术领域
3.本发明涉及医疗器械领域,尤其涉及一种植入物回收驱动手柄及回收装置。
背景技术:
4.对于高危心脏瓣膜疾病患者,经导管植入心脏瓣膜假体到原生瓣膜部位,待新植入的瓣膜假体完全释放后替代原生瓣膜发挥生理功能的方式,是治疗心脏瓣膜疾病的有效手段。
5.心脏瓣膜假体是植入物中的一种。在手术过程中,当植入物的尺寸不合适,或者在植入过程中植入物被损坏,导致出现植入物不适合病人的生理解剖结构的情况时,医护人员需要将植入人体的植入物取出,再重新植入新的植入物。
6.回收植入物,一般需要使用回收装置,回收装置通常包括回收管、鞘管和手柄。回收管的远端连接有用于捕捉植入物的回收网,鞘管套设于回收管外,鞘管和回收管均与手柄连接。首先,通过操作手柄使鞘管和回收管运动,实现回收管的远端和回收网运动至鞘管外;然后,展开回收网以捕捉待回收的植入物;回收网捕捉到植入物后,回收网包裹住植入物,通过操作手柄还可以使植入物与回收管一起被拉入鞘管内,回收网进入鞘管时,受到鞘管的约束而逐渐缩小,方便对植入物进行回收。
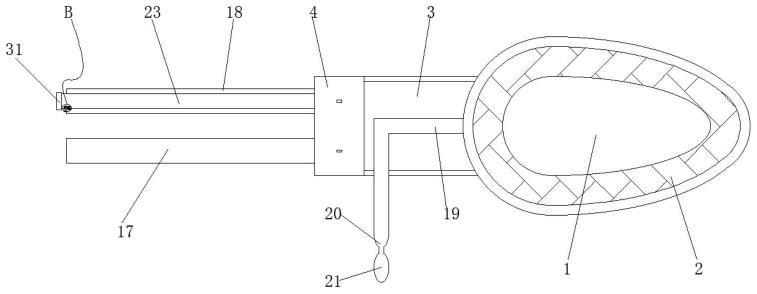
7.如图1所示,术中通常设置导引器16,导引器16用于引导植入物的输送。导引器16具有鞘管,该鞘管称作导管鞘15,导管鞘15用于形成血管通道,回收装置的鞘管11和回收管12穿设于导管鞘15中。
8.在回收较大的植入物时,如尺寸较大的心脏瓣膜假体,由于鞘管的内径较小,存在难以容纳植入物的问题,这种情况下,由于导管鞘的内径大于鞘管的内径,当扩张的回收网捕捉到待回收的心脏瓣膜假体后,可以向近端拉动回收管与鞘管,并同时拉动与心脏瓣膜假体连接的输送装置(例如定位导丝),将回收网和心脏瓣膜假体直接拉入导管鞘中。回收网进入导管鞘时受导管鞘约束而逐渐缩小,将心脏瓣膜假体包紧拉入导管鞘中,直至将回收管和心脏瓣膜假体拉出人体外。
9.但是,在将捕捉到心脏瓣膜假体的回收网拉入导管鞘时,阻力比较大,需要向回收管和鞘管施加的拉力比较大。
技术实现要素:
10.本发明的目的是提供至少一种植入物回收驱动手柄以及包括该驱动手柄的回收装置,以缓解植入物回收时阻力比较大,回收操作困难的技术问题。
11.本发明提供一种植入物回收驱动手柄,所述回收驱动手柄可包括第一滑动件、第二滑动件、固定筒和活动筒。第一滑动件和第二滑动件沿纵向分布。固定筒限定管通道,管通道接纳第一滑动件和第二滑动件。活动筒套设于固定筒上。其中,活动筒被构造成在至少部分行程中沿固定筒螺旋运动以驱动第一滑动件和第二滑动件沿所述管通道同步线性运动。可选地,活动筒可在全部行程中沿固定筒做螺旋运动。可选地,活动筒可在部分行程中沿固定筒做线性运动,在另一部分行程中沿固定筒做螺旋运动。
12.可选地,固定筒设有第一外螺旋槽,所述至少部分行程由第一外螺旋槽的至少一部分所限定。例如,第一外螺旋槽的长度可仅对应于第一滑动件和第二滑动件同步线性运动的行程设定;又例如,第一外螺旋槽的长度还可对应于第一滑动件与第二滑动件接合前第一滑动件的部分行程以及第一滑动件和第二滑动件同步线性运动的行程而设定。活动筒与第一滑动件相连接,活动筒设有内凸起部;内凸起部被构造成可沿第一外螺旋槽运动以引导活动筒的螺旋运动。优选地,内凸起部被构造成内螺旋肋。可选地,固定筒设有第一外螺旋槽,所述至少部分行程由第一外螺旋槽的至少一部分所限定。优选地,活动筒与第一滑动件相连接,活动筒设有内凸起部,活动筒的螺旋运动带动所述内凸起部沿第一外螺旋槽运动以产生所述至少部分行程中的所述线性运动。可选地,活动筒在部分行程中沿固定筒做线性运动,在另一部分行程中沿固定筒螺旋运动。例如,固定筒的外壁设有滑动柱面,滑动柱面与第一外螺旋槽沿回收方向依次分布,滑动柱面适于内凸起部沿纵向移动。优选地,滑动柱面上设有沿纵向延伸的纵长肋。
13.可选地,活动筒在全部行程中沿固定筒螺旋运动。例如,固定筒的外壁设有第二外螺旋槽,第二外螺旋槽与第一外螺旋槽沿回收方向依次分布,第二外螺旋槽的螺距大于第一外螺旋槽的螺距。优选地,内凸起部被构造成球体。
14.优选地,固定筒设有沿纵向延伸的第一线型槽;第一滑动件设有第一滑动件凸块,第一滑动件凸块延伸凸出于所述第一线型槽;活动筒设有环槽,环槽被构造成接纳第一滑动件凸块并使得环槽可相对于第一滑动件凸块转动。可选的,第二滑动件设有第二滑动件凸块,第二滑动件凸块延伸凸出于第一线型槽。在一些实施例中,活动筒包括筒体和固接于筒体内侧的环体,内凸起部设置于环体上。
15.优选地,第一滑动件为鞘管活塞,第二滑动件为网活塞,鞘管活塞网活塞沿回收方向依次分布。网活塞设有弹性体,固定筒的侧壁设有限位凹槽,限位凹槽被构造成可容纳弹性体以限制网活塞相对于固定筒沿回收方向移动。鞘管活塞连接有鞘管活塞帽,鞘管活塞帽设于鞘管活塞的靠近网活塞的一端,鞘管活塞帽被构造成适于使弹性体脱离限位凹槽以解除限制。
16.优选地,固定筒的内壁设有限位台阶,该限位台阶可限制网活塞沿回收方向的反方向移动。特别地,该限位台阶在受到网活塞抵接时限制网活塞沿所述回收方向的反方向移动。
17.本发明提供另一种植入物回收驱动手柄,所述回收驱动手柄包括第一滑动件、第二滑动件、第一固定筒、第一活动筒和第二活动筒。第一滑动件和第二滑动件沿纵向分布。第一固定筒限定管通道,管通道被构造成接纳第一滑动件和第二滑动件。第一活动筒和第二活动筒间隔套设于第一固定筒外。其中,第一活动筒被构造成在第一行程阶段相对于第一固定筒旋转运动以驱动第一滑动件做线性运动,第二活动筒被构造成在至少部分第二行
程阶段相对于第一固定筒旋转运动以驱动第二滑动件和第一滑动件做同步线性运动。例如,第二滑动件和第一滑动件的同步线性运动的整个行程可全部由第二活动筒的驱动产生,也可同步线性运动的一部分行程由第一活动筒驱动产生,另一部分行程由第二活动筒的驱动产生。
18.可选地,第二滑动件和第一滑动件的同步线性运动的整个行程可全部由第二活动筒所的驱动产生。优选地,第一固定筒沿纵向设有第二线型槽,第一滑动件设有第一外凸起部,第二滑动件设有第二外凸起部,第一外凸起部和第二外凸起部延伸凸出于所述第二线型槽。优选地,第一活动筒设有第一内螺旋槽,第二活动筒设有第二内螺旋槽,第一活动筒的旋转运动带动第一内螺旋槽与第一外凸起部配合以产生第一行程阶段的线性运动,第二活动筒的旋转运动带动第二内螺旋槽与第二外凸起部配合以产生第二行程阶段的同步线性运动。优选地,第一外凸起部被构造成与第一内螺旋槽相配合的第一外螺旋肋,第二外凸起部被构造成与第二内螺旋槽相配合的第二外螺旋肋。优选地,第二内螺旋槽的螺距小于第一内螺旋槽的螺距。
19.优选地,第一滑动件设有纵向通孔和可转动的锁环,锁环内侧设有锁环内凸块。优选地,第二滑动件设有第二齿爪,第二齿爪适于在第一滑动件与第二滑动件相接合的过程中穿过该纵向通孔。优选地,第一固定筒外设有可转动的旋钮,该旋钮的转动带动锁环转动,从而使锁环内凸块与第二齿爪相接合。可选地,第一滑动件设有第一齿爪,第一齿爪与锁环内凸块可转动地接合。可选地,锁环的内侧或者锁环靠近第一滑动件的端面设置有弧形凹槽,第一滑动件配置有与弧形凹槽相适配的凸部,凸部与弧形凹槽可转动地接合。
20.优选地,第一滑动件为鞘管活塞,第二滑动件为网活塞;手柄还包括第二固定筒,第二固定筒固定套设于第一固定筒外,第一活动筒的近端和第二活动筒的远端可转动地固定于第一固定筒和第二固定筒之间。优选地,旋钮套设于第二固定筒外,旋钮设有旋钮凸块,第二固定筒的侧壁设有旋钮通孔,旋钮凸块穿过所述旋钮通孔。优选地,锁环、鞘管活塞和网活塞均设于所述第一固定筒内,第一固定筒设有沿纵向延伸的第三线型槽。锁环外侧设有锁环外凸块,锁环外凸块延伸凸出于第三线型槽,锁环外凸块与旋钮凸块通过槽榫配合实现锁环与旋钮的接合。可选地,锁环外凸块上设置凸起部,旋钮凸块上设置槽。可选地,锁环外凸块上设置槽,旋钮凸块上设置凸起部。
21.本发明还提供一种植入物回收装置,包括回收网、回收管、鞘管和上述的植入物回收驱动手柄。优选地,回收管和鞘管可滑动地设于管通道内。优选地,鞘管套设于回收管外,回收管的远端连接回收网。优选地,鞘管的近端连接第一滑动件,回收管的近端连接第二滑动件。
22.本发明的特点及优点包括:
23.该手柄能够将活动筒的转动转化为第二滑动件的线性移动,便于操作者对第二滑动件施加较大的纵向力,从而驱动第二滑动件和与第二滑动件相连接的导管元件沿回收方向移动,以顺利地将回收装置中的各导管元件和捕捉的植入物拉入到导管鞘中。由于旋转操作比拉拔操作更方便,因此本发明能够降低回收操作难度,解决回收植入物时因阻力大引起的回收操作困难的问题。
附图说明
24.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
25.图1为现有技术中的鞘管、回收管与导管鞘的配合图;
26.图2a至图2c示出了本发明提供的第一种实施方式的植入物回收驱动手柄的示意图;
27.图3a至图3c示出了第一种实施方式的手柄的网活塞的示意图;
28.图4a和图4b分别示出了第一种实施方式的手柄在回收网展开前和展开后的示意图;
29.图5a和图5b分别示出了第一种实施方式的手柄在锁定状态和解锁状态的示意图;
30.图6a-图6d示出了第一种实施方式的手柄的若干工作状态的示意图;
31.图7a-图8b示出了本发明提供的设有另一种内凸起部的第一种实施方式的植入物回收驱动手柄的示意图;
32.图9a至图9c示出了本发明提出的第二种实施方式的植入物回收驱动手柄的示意图;
33.图10a至图10c示出了第二种实施方式的手柄中网活塞与鞘管活塞之间联动配合的关系示意图;
34.图11示出了第二种实施方式的手柄中第一固定筒、旋钮与锁环的连接示意图;
35.图12a-图12d及图13a-图13d示出了第二种实施方式的手柄的若干工作状态的示意图。
36.附图标号说明:
37.11、鞘管;12、回收管;121、回收网;131、内管;132、止血阀装置;14、显影标记;15、导管鞘;16、导引器;
38.20、固定筒;201、管通道;202、第三分筒体;203、第四分筒体;200、回收方向;
39.231、握把;232、固定手柄帽;233、冲洗管;2331、冲洗阀;234、提示标志;
40.24、第一线型槽;251、滑动柱面;252、纵长肋;26、第二外螺旋槽;27、限位台阶;
41.28、第一固定筒;281、第二线型槽;282、第三线型槽;283、固定柱;
42.29、第二固定筒;291、旋钮通孔;292、固定孔;293、隔挡件;294、定位齿;
43.30、活动筒/第二活动筒;31、环槽;32、筒体;321、第一分筒体;322、第二分筒体;331、第一环体;332、第二环体;341、连接凹槽;342、连接凸块;
44.40、第一活动筒;41、第一内螺旋槽;42、第一外凸起部/第一外螺旋肋;43、定位槽;
45.511、第二内螺旋槽;512、第二外凸起部/第二外螺旋肋;
46.521、第一外螺旋槽;522、内凸起部;523、内螺旋肋;524、球体;
47.60、网活塞/第二滑动件;61、第二滑动件凸块;62、网活塞帽;63、弹性体;631、限位凹槽;
48.70、鞘管活塞/第一滑动件;71、第一滑动件凸块;72、鞘管活塞帽;73、密封圈;74、纵向通孔;
49.811、第二齿爪;812、第一齿爪;82、旋钮;821、旋钮凸块;83、锁环;831、锁环内凸块;832、锁环外凸块。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
51.第一种实施方式的植入物回收驱动手柄
52.参照图2a-图2c、图7a和图7b示出的一种植入物回收驱动手柄,该手柄可包括第一滑动件70、第二滑动件60、固定筒20和活动筒30。固定筒20限定管通道201,第一滑动件70和第二滑动件60在管通道201内沿纵向分布;管通道201被构造成接纳第一滑动件70和第二滑动件60。活动筒30套设于固定筒20上;活动筒30被构造成在至少部分行程中沿固定筒20螺旋运动以驱动第一滑动件70和第二滑动件60沿管通道201同步线性运动。
53.该植入物回收驱动手柄应用于经导管植入物的回收手术,第一滑动件70作为鞘管活塞,第二滑动件60作为网活塞。鞘管11套设于回收管12外,且回收管12的近端延伸超出鞘管11的近端。鞘管11和回收管12均穿设于管通道201内且均能够在管通道201内移动。鞘管11固接于鞘管活塞,回收管12固接于网活塞。回收管12和鞘管11能够自固定筒20的近端穿入,从固定筒20的远端穿出,进入血管。回收方向200平行于固定筒20的纵向,具体为固定筒20的远端指向固定筒20的近端的方向。近端和远端采用植入手术的常规方式来定义,以操作者为参考对象,即以靠近操作者的一端为近端,以远离操作者的一端为远端。第一滑动件70与第二滑动件60沿回收方向200由远至近依次分布。
54.在一些实施例中,参照图2a-图6d,固定筒20的靠近近端的外表面设有第一外螺旋槽521,活动筒30的内壁上设置有内凸起部522,内凸起部522被构造成适于由第一外螺旋槽521引导作螺旋运动。活动筒30与第一滑动件70可相对转动地联接。转动活动筒30时,活动筒30随内凸起部522一起沿第一外螺旋槽521作螺旋运动。活动筒30作螺旋运动,即活动筒30在转动的同时,沿固定筒20的纵向朝近端移动。活动筒30可将沿固定筒20的纵向的移动传递给第一滑动件70,使第一滑动件70移动至与第二滑动件60接合,以使第二滑动件60与第一滑动件70接合后随活动筒30一起沿固定筒20的纵向朝近端移动。
55.参照图2a-图2c,固定筒20设有沿纵向延伸的第一线型槽24,第一滑动件70设有第一滑动件凸块71,第一滑动件凸块71沿固定筒20的径向延伸凸出于第一线型槽24,第一滑动件凸块71可在第一线型槽24内滑动。活动筒30设有环槽31,环槽31被构造成可接纳第一滑动件凸块71,且环槽31可相对于第一滑动件凸块71转动,即活动筒30能够相对于第一滑动件凸块71转动。具体地,第一滑动件凸块71嵌入活动筒30的环槽31内,且第一滑动件凸块71与环槽31的壁之间存在间隙。
56.继续参照图2a-图2c,第一滑动件70设于固定筒20内,第一滑动件凸块71延伸凸出于第一线型槽24,以与活动筒30联接;同时,第一滑动件凸块71与第一线型槽24还可对第一滑动件70起导向作用,引导第一滑动件70沿固定筒20的纵向朝近端移动。活动筒30转动时,环槽31可相对第一滑动件凸块71转动,同时环槽31可阻止第一滑动件凸块71与活动筒30之
间沿固定筒20的纵向发生相对移动。这样,当活动筒30作螺旋运动时,活动筒30驱动第一滑动件凸块71及第一滑动件70沿固定筒20的纵向朝近端移动。第一滑动件70移动至与第二滑动件60接触配合(接合)后,继续旋转活动筒30,第一滑动件70可带动第二滑动件60沿固定筒20的纵向朝近端移动。
57.参照图2a和图2b,第二滑动件60上设有第二滑动件凸块61,第二滑动件凸块61沿固定筒20的径向延伸凸出于第一线型槽24。第二滑动件凸块61能够在第一线型槽24内滑动,以引导第二滑动件60沿固定筒20的纵向朝近端移动。
58.该植入物回收驱动手柄通过活动筒30的内凸起部522与固定筒20的第一外螺旋槽521的配合,以及活动筒30的环槽31与第一滑动件凸块71的配合,可将活动筒30的螺旋运动转化为第一滑动件70和第二滑动件60的纵向线性运动,从而为鞘管11和回收管12提供驱动力。该手柄便于操作者对第二滑动件60施加较大的纵向力,驱动第二滑动件60和回收管12沿回收方向200移动,以顺利地将回收管12、回收网121(参见图4a)和捕捉的植入物拉入到如图1所示的导管鞘15中,降低回收操作难度。
59.参照图2b,在第一滑动件70移动至与第二滑动件60接触配合之前,活动筒30驱动第一滑动件70移动,第二滑动件60保持静止,为第一行程阶段;在第一滑动件70移动至与第二滑动件60接触配合之后,活动筒30驱动第一滑动件70与第二滑动件60一起移动,为第二行程阶段。在第二行程阶段的至少一段,即至少部分行程中,该植入物回收驱动手柄需将活动筒30的螺旋运动转化为第一滑动件70和第二滑动件60的同步纵向运动。
60.在一些实施例中,活动筒30在第一行程阶段与第二行程阶段所需的移动速度相同。在一些实施例中,活动筒30在第一行程阶段的至少一部分所需的移动速度大于第二行程阶段的移动速度。在一些实施例中,活动筒30在第二行程阶段的初始段所需的移动速度与第一行程阶段的移动速度相似。
61.在一些实施例中,第一外螺旋槽521的长度足够长,在第一行程阶段与第二行程阶段,内凸起部522均与第一外螺旋槽521全程相配合。此时,在两个行程阶段,植入物回收驱动手柄都将活动筒30的螺旋运动转化为第一滑动件70的纵向运动,在第二行程阶段中还转化为第二滑动件60与第一滑动件70的同步纵向运动。
62.在另一些实施方式中,固定筒20的外壁可设有内凸起部配合结构,内凸起部配合结构与第一外螺旋槽521沿回收方向200由远至近依次分布。
63.具体地,在一些实施例中,第一外螺旋槽521对应于第二行程阶段设置,或者第一外螺旋槽521对应于第一行程阶段的尾段和第二行程阶段设置。活动筒30上的内凸起部522沿固定筒20的纵向移动,在第一行程阶段的至少一段,内凸起部522可以与内凸起部配合结构相配合;在第二行程阶段,内凸起部522可以与第一外螺旋槽521相配合。通过设置这样的内凸起部配合结构,可以使活动筒30在第一行程阶段的至少一部分的移动速度大于第二行程阶段的移动速度。
64.在另一些实施例中,内凸起部配合结构对应于第二行程阶段的初始段和第一行程阶段设置。通过设置这样的内凸起部配合结构,可以使活动筒30在第二行程阶段的初始段和第一行程阶段均获得较大的移动速度。
65.在优选的实施例中,内凸起部配合结构对应于第一行程阶段设置,第一外螺旋槽521对应于第二行程阶段设置。在第一行程阶段,活动筒30为第一滑动件70提供驱动力,第
一滑动件70带动鞘管11朝近端移动,回收管12保持静止,回收管12的远端及回收网121从鞘管11的远端露出,回收网121被释放。在第二行程阶段,第一滑动件70与第二滑动件60一起移动,通过内凸起部522与第一外螺旋槽521配合,活动筒30为第一滑动件70的移动与第二滑动件60的移动提供驱动力,便于回收管12和鞘管11均获得较大的纵向力,使回收网121以及捕捉的植入物顺利进入到如图1所示的导管鞘15中。
66.参照图2a和图2c,在一些实施例中,内凸起部配合结构可以包括滑动柱面251,滑动柱面251沿固定筒20的纵向延伸,内凸起部522能够在滑动柱面251上沿固定筒20的纵向滑动,滑动柱面251与第一外螺旋槽521沿回收方向200依次分布。在第一阶段,沿固定筒20的纵向拉动活动筒30,设有内凸起部522的活动筒30与第一滑动件70一起同步移动,可以使第一滑动件70以及与第一滑动件7固接的鞘管11获得较大的移动速度,进而以较快的速度释放回收网121,减少手术流程时间。该实施例中,可以实现调速,滑动柱面251作为快速段,第一外螺旋槽521作为慢速段,既能减少手术流程时间,又能降低将回收网121以及捕捉的植入物拉入到如图1所示的导管鞘15中的难度。在内凸起部配合结构包括滑动柱面251的情况下,内凸起部522可以被构造成与第一外螺旋槽521相配合的内螺旋结构,内螺旋结构可以在滑动柱面251上滑动。
67.进一步地,滑动柱面251上可以设有沿固定筒20的纵向延伸的纵长肋252,如图2c、图5a和图5b所示,纵长肋252可以阻止内凸起部522转动,对内凸起部522及活动筒的纵向移动进行导向。
68.如图2c所示,在一些实施例中,内凸起部522可以被构造成内螺旋肋523,内螺旋肋523与第一外螺旋槽521相配合,内螺旋肋523可以在滑动柱面251上滑动,并且,内螺旋肋523与第一外螺旋槽521具有较大的接触面积,便于通过转动活动筒30,使活动筒30获得较大的沿固定筒20的纵向的驱动力。
69.参照图5a和图5b,滑动柱面251上设置的纵长肋252还可以起到限位锁定活动筒30的作用。当内螺旋肋523位于纵长肋252的远端侧时,转动活动筒30,使内螺旋肋523与纵长肋252的远端抵接,如图5a所示,纵长肋252可以阻止活动筒30沿固定筒20的纵向移动,活动筒30处于锁定状态。转动活动筒30,使内螺旋肋523与纵长肋252相错开,如图5b所示,活动筒30切换为解锁状态,内螺旋肋523可以在滑动柱面251上沿固定筒20的纵向移动。这样,转动活动筒30可以实现锁定和解锁,操作简便可靠。
70.在一些实施例中,活动筒30的内壁设有多个内螺旋肋523,多个内螺旋肋523在圆周方向间隔分布。当活动筒30转动至纵长肋252位于相邻两个内螺旋肋523之间时,为解锁状态。优选地,内螺旋肋523的数量为两个,两个内螺旋肋523之间形成的圆心角为180
°
,两个内螺旋肋523之间设有间隔,当两个内螺旋肋523之间的间隔转动至与纵长肋252对准时,活动筒30为解锁状态。
71.在一些实施例中,如图2a所示,活动筒30和固定筒20上配合设有提示解锁状态与锁定状态的提示标志234。具体地,活动筒30的远端外表面设置提示标志234。固定筒20的远端设置易于抓握的握把231,握把231的近端外表面设置提示标志234。参照图5a和图5b,提示标志234位于图5a所示的位置时,手柄处于锁定状态,提示标志234位于图5b所示的位置时,手柄处于解锁状态。
72.在另一些实施例中,如图7a所示,内凸起部配合结构可以包括设置于固定筒20远
端外表面的第二外螺旋槽26,第二外螺旋槽26与第一外螺旋槽521沿回收方向200依次分布,第二外螺旋槽26的螺距大于第一外螺旋槽521的螺距。操作者转动活动筒30时,活动筒30在第二外螺旋槽26上的移动速度较快,活动筒30在第一外螺旋槽521上的移动速度较慢。在一些实施例中,第二外螺旋槽26和第一外螺旋槽521连接构成一条变螺距的螺旋槽,其中第二外螺旋槽26作为该变螺距的螺旋槽的快速段,第一外螺旋槽521作为该变螺距的螺旋槽的慢速段。
73.参见图7a-图8b,内凸起部522可以被构造成球体524。球体524可以在第一外螺旋槽521中滑动,也可以在第二外螺旋槽26中滑动,球体524还可以在滑动柱面251上移动。内凸起部522被构造成球体524,可以减小活动筒30在固定筒20上运动的阻力,便于使活动筒30顺畅地转动或者移动。内凸起部522被构造成球体524,适用于内凸起部配合结构包括滑动柱面251的情况,也适用于内凸起部配合结构包括第二外螺旋槽26的情况。如图7a-图8b所示,活动筒30内侧设有第二环体332,球体524安装于第二环体332,球体524可以在第二环体332内旋转。
74.在一些实施例中,固定筒20外表面沿纵向仅设置一条外螺旋槽,第二环体332设置一个球体524,球体524在该一条外螺旋槽内运动。在另一些实施例中,固定筒20外表面沿纵向设置若干条外螺旋槽,若干条纵向的外螺旋槽在固定筒20的周向均匀间隔分布。相应地,第二环体332设置的球体524的数量与外螺旋槽数相同,每个球体524对应一条外螺旋槽。设置多个球体524与固定筒20上的多个外螺旋槽配合,有利于增加球体524与固定筒20的接触面积,便于通过转动活动筒30,使活动筒30获得较大的沿固定筒20的纵向的驱动力。但是,随着外螺旋槽数量的增加,外螺旋槽彼此间的距离太近使得固定筒20可能无法承受较大的扭矩。因此,优选地,如图7a-图8b所示,球体524的数量为三个,三个球体524沿周向均匀安装于第二环体332,即间隔120
°
,外螺旋槽的数量对应也为三个。优选地,外螺旋槽设置为变螺距的外螺旋槽,例如,该变螺距的外螺旋槽由沿回收方向200依次分布的第二外螺旋槽26和第一外螺旋槽521组成。
75.内凸起部522的结构还可以有其它实施例,例如:内凸起部522可以为沿活动筒30的径向延伸的圆柱,内凸起部522运动至第一外螺旋槽521内时,内凸起部522的圆柱面与第一外螺旋槽521的内壁可滑动地配合。内凸起部522运动至第二外螺旋槽26内时,也可以与第二外螺旋槽26的内壁可滑动地配合。
76.如图2b、图6c和图6d所示,第一滑动件70连接有鞘管活塞帽72,鞘管活塞帽72设于第一滑动件70的靠近第二滑动件60的一端。第二滑动件60设有弹性体63,固定筒20的侧壁设有限位凹槽631,限位凹槽631被构造成可容纳弹性体63以限制第二滑动件60相对于固定筒20沿回收方向移动。鞘管活塞帽72被构造成能够使弹性体63脱离限位凹槽631以解除所述限制。
77.如图2b-图3c所示,弹性体63能够卡接于限位凹槽631中,以阻止网活塞60相对于固定筒20沿回收方向200移动;鞘管活塞帽72被构造成能够套设于弹性体63外,使弹性体63收缩至脱离限位凹槽631。这样,鞘管活塞70沿回收方向200移动的过程中,在鞘管活塞70接触网活塞60之前,网活塞60的位置被弹性体63限定,有利于鞘管11相对于回收管12朝近端移动,使回收网121从鞘管11中露出以及展开;鞘管活塞帽72套在弹性体63外后,鞘管活塞70与网活塞60连接在一起,可同步向近端移动。
78.如图3a-图3b所示,弹性体63与网活塞60可以为一体结构,弹性体63设置于网活塞60的侧壁,并且弹性体63具有悬伸端,悬伸端向外凸出。弹性体63自身材料可具有弹性,悬伸端受到鞘管活塞帽72的压迫能够向内收缩。
79.在一些实施例中,固定筒20的内壁设有限位台阶27,限位台阶27被构造成当受到第二滑动件60抵接时限制第二滑动件60沿回收方向200的反方向移动。如图2c所示,当第二滑动件60抵接于限位台阶27时,限位台阶27阻止第二滑动件60沿回收方向200的反方向移动。
80.通过限位台阶27,可以对第二滑动件60进行定位,方便装配。第二滑动件60沿回收方向200的反向移动的过程中,弹性体63卡接于限位凹槽631的同时或者之后,第二滑动件60与限位台阶27抵接。限位台阶27与弹性体63分别对第二滑动件60的两个方向的位置进行限制,以实现对第二滑动件60进行限位。
81.在一些实施例中,如图6a和图6b所示,鞘管活塞帽72与鞘管活塞70之间可设有密封圈73;如图6c和图6d所示,网活塞60的近端连接有网活塞帽62,网活塞帽62与网活塞60之间可设有密封圈73。通过设置密封圈73,可防止回收植入物的过程中病人失血过多。密封圈73作为止血密封组件,可以采用软硅胶的密封圈73。
82.在一些实施例中,如图2c所示,活动筒30包括筒体32和固接于筒体32内侧的第一环体331,内凸起部522设置于第一环体331。第一环体331的外表面设置有连接凹槽341,筒体32的内表面设置有连接凸块342,通过连接凹槽341和连接凸块342的配合,第一环体331与筒体32固定于一体。但是,第一环体331与筒体32之间的固接方式,除了连接凹槽341和连接凸块342配合,还可以是其他可实现固定连接的方式。需要指出的是,活动筒30不是必须设置独立的第一环体331,只要活动筒30上设置有内凸起部522即可。
83.在一些实施例中,如图2c所示,筒体32可以采用两瓣结构,即筒体32包括第一分筒体321和第二分筒体322,第一分筒体321与第二分筒体322能够拼合为完整的筒体32。
84.在一些实施例中,如图2c所示,固定筒20可以采用两瓣结构,即固定筒20包括第三分筒体202和第四分筒体203,第三分筒体202与第四分筒体203能够拼合为完整的筒体结构。第一线型槽24可以设置于第三分筒体202和第四分筒体203的拼接处。如图2a-图2c和图7a所示,固定筒20的远端还设置有握把231,握把231和活动筒30上均设置有易于抓握的特征部,医护人员可握住握把231操作活动筒30,使活动筒30相对固定筒20移动。第二滑动件60上设置有冲洗管233,冲洗管233连接有冲洗阀2331;固定筒20的近端连接有固定手柄帽232,固定手柄帽232具有容纳冲洗管233的凹槽。
85.第二种实施方式的植入物回收驱动手柄
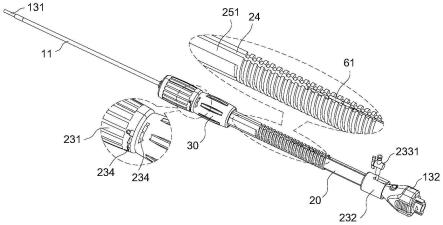
86.参照图9a-图13c所示,示出了另一种植入物回收驱动手柄,在一些实施例中,该手柄包括第一滑动件70、第二滑动件60、第一固定筒28、第一活动筒40和第二活动筒30。第一滑动件70和第二滑动件60沿纵向由远到近依次分布。第一固定筒28限定管通道201,管通道201构造成可接纳第一滑动件70和第二滑动件60。第一活动筒40和第二活动筒30间隔套设于第一固定筒28外。第一活动筒40被构造成在第一行程阶段相对于第一固定筒28旋转运动以驱动第一滑动件70做线性运动,第二活动筒30被构造成在至少部分第二行程阶段相对于第一固定筒28旋转运动以驱动第二滑动件60和第一滑动件70做同步线性运动。
87.在一些实施例中,如图9a-图13d所示的手柄,在第一行程阶段,第一滑动件70作线
性运动,第二滑动件60保持静止;在第二行程阶段,第二滑动件60和第一滑动件70同步线性运动。
88.在另一些实施例中,第一活动筒40对应于第二行程阶段的初始段和第一行程阶段设置,因此,第一活动筒40被构造成在第一行程阶段相对于第一固定筒28旋转运动以驱动第一滑动件70产生线性运动,并且在第二行程阶段的初始段相对于第一固定筒28旋转运动以驱动第二滑动件60与第一滑动件70做同步线性运动。相应地,第二活动筒30则被构造成在第二行程阶段的除初始段以外的剩余段相对于第一固定筒28旋转运动以驱动第二滑动件60和第一滑动件70同步线性运动。
89.该植入物回收驱动手柄应用于经导管植入物的回收手术,第一滑动件70作为鞘管活塞,第二滑动件60作为网活塞。回收管12和鞘管11能够自第一固定筒28的近端穿入,从第一固定筒28的远端穿出并进入血管,回收方向200为第一固定筒28的远端指向第一固定筒28的近端的方向。近端和远端采用植入手术的常规方式来定义,以操作者为参考对象,即以靠近操作者的一端为近端,以远离操作者的一端为远端。鞘管活塞70与网活塞60沿回收方向200由远到近依次分布。
90.图9a-图13c所示的植入物回收驱动手柄,第一固定筒28沿纵向设置有第二线型槽281。第一滑动件70上设置有第一外凸起部42,第二滑动件60上设置有第二外凸起部512,第一外凸起部42和第二外凸起部512沿第一固定筒28的径向延伸凸出于第二线型槽281。
91.参考图9a-图9c,第一活动筒40和第二活动筒30可转动地安装于第一固定筒28,且第一活动筒40和第二活动筒30沿第一固定筒28的纵向移动被限制。第一活动筒40的内壁设有第一内螺旋槽41,第一外凸起部42适于在第一内螺旋槽41内运动。第一活动筒40的纵向移动被限制,转动第一活动筒40时,第一外凸起部42在第一内螺旋槽41内运动,驱动第一滑动件70沿第一固定筒28上的第二线型槽281纵向移动。第二活动筒30的内壁设有第二内螺旋槽511,第二外凸起部512适于在第二内螺旋槽511内运动。第二活动筒30的纵向移动被限制,转动第二活动筒30时,第二外凸起部512在第二内螺旋槽511内运动,驱动第二滑动件60沿第一固定筒28上的第二线型槽281纵向移动。
92.该植入物回收驱动手柄,通过第一活动筒40的第一内螺旋槽41、第一滑动件70的第一外凸起部42及第二线型槽281的配合,可将第一活动筒40的旋转运动转化为第一滑动件70的纵向运动;通过第二活动筒30的第二内螺旋槽511、第二滑动件60的第二外凸起部512及第二线型槽281的配合,可将第二活动筒30的旋转运动转化为第二滑动件60和第一滑动件70的纵向运动。通过前述配合,如图9b所示,该植入物回收驱动手柄可对鞘管11和回收管12提供驱动力。相比于直接推动或者拉动回收管12作线性运动,该手柄利用螺旋结构,便于操作者对第二滑动件60施加比较大的纵向力,驱动第二滑动件60和回收管12沿回收方向200移动,以顺利地将回收管12、回收网121和捕捉的植入物拉入到如图1所示的导管鞘15中,降低回收操作难度。
93.在一些实施例中,如图9b和图10a所示,第一外凸起部42被构造成与第一内螺旋槽41相配合的第一外螺旋肋42。第一外螺旋肋42呈与第一内螺旋槽41相配合的螺旋状,以使第一外凸起部42与第一内螺旋槽41具有较大的接触面积,有利于将第一活动筒40的转动转化为第一滑动件70的纵向移动。
94.在一些实施例中,如图9b和图10a所示,第二外凸起部512被构造成与第二内螺旋
槽511相配合的第二外螺旋肋512。第二外螺旋肋512呈与第二内螺旋槽511相配合的螺旋状,以使第二外凸起部512与第二内螺旋槽511具有较大的接触面积,有利于将第二活动筒30的转动转化为第二滑动件60和第一滑动件70的纵向移动。
95.在一些实施例中,第一内螺旋槽41的螺距大于第二内螺旋槽511的螺距,第一内螺旋槽41作为快速段对应第一行程阶段,第二内螺旋槽511作为慢速段对应第二行程阶段。转动第一活动筒40,可以在第一行程阶段使鞘管11以较快的速度沿回收方向200移动,以使回收网121的远端及回收网121以较快的速度从鞘管11中露出。转动第二活动筒30,可以在第二行程阶段使回收网121以较慢的速度沿回收方向200移动,为回收管12和回收网121提供较大的拉力,有利于顺利地将回收网121和被回收网121捕捉到的植入物一起拉入到如图1所示的导管鞘15中。
96.在第一内螺旋槽41的螺距大于第二内螺旋槽511的螺距的情况下,在另一些实施例中,第一活动筒40上的第一内螺旋槽41足够长,第一内螺旋槽41对应于第二行程阶段的初始段和第一行程阶段设置,第二内螺旋槽511对应第二行程阶段的除初始段以外的剩余段设置,可以在第二行程阶段的初始段和第一行程阶段获得比第二行程阶段的剩余段较快的移动速度。
97.优选地,第一外凸起部42的数量为多个,多个第一外凸起部42沿第一固定筒28的纵向间隔分布,以增大第一滑动件70与第一内螺旋槽41的接触面积,便于对第一滑动件70施加较大的驱动力。类似地,第二外凸起部512的数量为多个,便于对第二滑动件60施加较大的驱动力。
98.第一外凸起部42的结构不限于外螺旋肋,例如:第一外凸起部42还可以为沿第一活动筒40的径向延伸的圆柱,该圆柱延伸至第一内螺旋槽41内,第一外凸起部42的圆柱面与第一内螺旋槽41的内壁可滑动地配合。第二外凸起部512的结构与此类似,不再赘述。
99.如图9a-图9c、图10a所示,第一活动筒40和第二活动筒30套设于第一固定筒28外;第一固定筒28设有沿纵向延伸的第二线型槽281。第二滑动件60设于第一固定筒28内,第二滑动件60上设有第二滑动件凸块61,第二滑动件凸块61可滑动地设于第二线型槽281中,第二外凸起部512设于第二滑动件凸块61的顶部。如图9b和图9c所示,第二滑动件凸块61凸出于第二线型槽281,使得第二滑动件凸块61顶部的第二外凸起部512能够与设于第二活动筒30的内壁的第二内螺旋槽511配合;并且,第二滑动件凸块61能够在第二线型槽281内沿第一固定筒28的纵向移动,对第二滑动件60在第一固定筒28内的移动起到导向作用。
100.第一滑动件70设于第一固定筒28内,第一滑动件70上设有第一滑动件凸块71,第一滑动件凸块71可滑动地设于第二线型槽281中,第一外凸起部42设于第一滑动件凸块71的顶部,第一滑动件凸块71凸出于第二线型槽281,使得第一外凸起部42能够与第一内螺旋槽41接触配合;并且,第一滑动件凸块71在第二线型槽281内沿纵向移动,可对第一滑动件70在第一固定筒28内的移动起导向作用。
101.在一些实施例中,如图9b和图9c所示,手柄可包括第一固定筒28和第二固定筒29,第二固定筒29和第一固定筒28均为两瓣结构,第二固定筒29固定连接并套设于第一固定筒28外。具体地,第二固定筒29的中部内侧设置有固定孔292(参见图9c),第一固定筒28的中部的外表面设置有固定柱283(参见图11),第二固定筒29和第一固定筒28通过固定孔292和固定柱283的配合进行固定连接。第二固定筒29的内周壁中部设置有隔挡件293,固定孔292
设置于隔挡件293上。第二固定筒29的隔挡件293使第一活动筒40和第二活动筒30间隔套设于第一固定筒28外,对第一活动筒40和第二活动筒30进行纵向限位。具体地,隔挡件293是隔环,如图9c所示,隔环即设置于第二固定筒29的内周壁的弧形凸块。
102.具体地,继续参照图9b,第一活动筒40的近端伸入第二固定筒29的隔挡件293左侧的内腔,第二活动筒30的远端伸入第二固定筒29的隔挡件293右侧的内腔,第一活动筒40的远端和第二活动筒30的近端均设置有易于抓握的特征部。第一活动筒40的中部的外表面设置有环形的定位槽43,第二固定筒29的远端的内表面设置有定位齿294,第一活动筒40和第二固定筒29可通过定位槽43与定位齿294配合进行纵向限位。例如,定位齿294与定位槽43之间在径向上存在间隙,第一活动筒40转动时,定位槽43可相对定位齿294转动。同样地,第二活动筒30与第二固定筒29可通过齿槽配合进行纵向限位。第二固定筒29和第一固定筒28将第一活动筒40和第二活动筒30可转动地且间隔地固定于第二固定筒29和第一固定筒28之间,这样方便装配,且能够提高结构的稳定性。
103.使用该植入物回收驱动手柄回收植入物时,第一滑动件70先带动鞘管11沿回收方向200移动,以释放回收网121。回收网121捕捉植入物后,回收管12与鞘管11均可沿回收方向200移动,以被拉入到如图1所示的导管鞘15中。优选地,回收网121捕捉植入物后,回收管12与鞘管11一起同步地沿回收方向200移动。在一些实施例中,如图10a-图10c所示,第一滑动件70设有纵向通孔74;第一滑动件70还设有可转动的锁环83,锁环83内侧设有锁环内凸块831;第二滑动件60设有第二齿爪811,第二齿爪811能够穿过纵向通孔74,例如,第二齿爪811在第一滑动件70与第二滑动件60相接合的过程中穿过纵向通孔74。如图11所示,第一固定筒28外周设有可转动的旋钮82,旋钮82转动时能够带动锁环83转动至第二齿爪811与锁环内凸块831相接合。当手柄设置有第二固定筒29时,如图9b和图9c所示,旋钮82套设于第二固定筒29外。
104.如图11所示,转动旋钮82,旋钮82带动锁环83一起转动,使得第二齿爪811与锁环内凸块831的远端抵接,第二齿爪811与锁环内凸块831接合到一起。由于锁环83纵向固定设置于第一滑动件70上,在这种情况下,如图12c-图12d和图13c-图13d所示,在第二滑动件60及第二齿爪811向近端移动的过程中,第一滑动件70能够与第二滑动件60一起同步沿回收方向200移动。
105.如图12a和图13a所示,在第一滑动件70与第二滑动件60接合到一起之前,第一滑动件70与第二滑动件60可以独立地运动,即两者之间可以产生相对运动。例如,操作第一活动筒40使第一滑动件70向第二滑动件60靠近,第二齿爪811将穿入纵向通孔74。如图12b和图13b所示,第一滑动件70向第二滑动件60移动至超出第一内螺旋槽41的行程后,第一滑动件70不再受到第一内螺旋槽41的限制作用;同时,第二齿爪811穿入纵向通孔74并移动至锁环内凸块831的远端侧。如图12c和图13c所示,转动旋钮82时,旋钮82带动锁环83转动使第二齿爪811与锁环内凸块831啮合、扣紧或抵接,第一滑动件70和第二滑动件60通过锁环内凸块831接合在一起,因此,第一滑动件70可以随第二滑动件60一起移动。
106.具体地,如图10a-图10c所示,第二齿爪811远端的外侧设有凸起部。第二齿爪811与锁环内凸块831接合时,第二齿爪811的主体部分位于锁环内凸块831的内侧,凸起部位于锁环内凸块831与锁环31远端端部之间,使得第二齿爪811与锁环内凸块831扣紧。
107.锁环83可旋转地设置于第一滑动件70上,锁环83能够随第一滑动件70一起移动,
并且锁环83能够相对于第一滑动件70转动。锁环83可以设置于第一滑动件70的远端侧。如图10a-图10c所示,第一滑动件70设有第一齿爪812,在装配时,可通过转动锁环83或第一滑动件70使第一齿爪812与锁环内凸块831接合。如图10a和图10b所示,第一齿爪812与第二齿爪811在圆周方向上相错开。第二齿爪811与锁环内凸块831接合之前,如图10a所示,仅第一齿爪812与锁环内凸块831扣紧,锁环83可随第一滑动件70一起移动。通过配置锁环内凸块831在圆周方向的合适长度,当锁环83及锁环内凸块831转动时,第一齿爪812和第二齿爪811均能与锁环内凸块831扣紧,如图10b所示,从而使得第一滑动件70与第二滑动件60相接合。进一步地,锁环内凸块831呈l形,可以防止锁环83被过度转动,避免因过度旋转锁环83导致第一齿爪812与锁环内凸块831脱离接合。
108.参照图9c,当手柄设置有第二固定筒29时,在一些实施例中,第二固定筒29的侧壁设有旋钮通孔291,旋钮82设有旋钮凸块821,旋钮凸块821穿过旋钮通孔291;第一固定筒28设有纵向延伸的第三线型槽282,锁环83外侧设有锁环外凸块832,锁环外凸块832延伸凸出于第三线型槽282并可与旋钮凸块821通过槽榫配合实现锁环83与旋钮82的接合。如图9c、图12b和图13b所示,在锁环83沿纵向移动至与旋钮82的旋钮凸块821对齐的情况下,旋钮凸块821与锁环外凸块832连接,以实现旋钮82带动锁环83转动。
109.在一些实施例中,如图10a所示,锁环外凸块832的顶面设有纵向延伸的槽部,旋钮凸块821设有与槽部相配合的凸起部,锁环外凸块832在第三线型槽282内沿回收方向200移动时,如图11所示,旋钮凸块821的凸起部会滑入锁环外凸块832的槽部内,使得转动旋钮82能够带动锁环83一起转动。在另一些实施例中,锁环83和旋钮82的接合方式还可以是在锁环外凸块832上设置凸起部,在旋钮凸块821上设置槽部。
110.锁环外凸块832延伸通过第三线型槽282至第一固定筒28的侧壁以外,旋钮凸块821延伸通过旋钮通孔291至第二固定筒29的内腔,以方便旋钮凸块821与锁环外凸块832接合。第三线型槽282还可以对锁环外凸块832以及锁环83的移动起到导向作用。在一些实施例中,如图9c所示,第三线型槽282被构造成l形。一方面,在锁环83随着第一滑动件70向第二滑动件60移动的过程中,第三线型槽282限制锁环外凸块832及锁环83发生偏转,便于旋钮凸块821上的凸起部滑入锁环外凸块832的槽部中,提高操作的稳定性。另一方面,在锁环83和第一滑动件70移动至与第二滑动件60进行接合的位置时,l形的第三线型槽282可以为锁环外凸块832及锁环83随旋钮82转动预留出空间。
111.锁环83与第一滑动件70的接合方式不限于上述第一齿爪812与锁环内凸块831相配合的实施例,只要锁环83与第一滑动件70纵向的相对位置被限定且可绕轴线相对转动即可。例如,锁环83被构造成在其朝向第一滑动件70的端面上设置弧形凹槽,第一滑动件70上设置伸入该弧形凹槽的特征部,弧形凹槽和该特征部配合使锁环83可旋转地设置于第一滑动件70上。具体地,弧形槽的弧形是以锁环轴线与锁环端面的交点为圆心的弧形,该弧形的圆心角可以是60
°
。特征部可以是凸部,凸部可滑动的设置于弧形槽中,并且凸部被限定在弧形槽中使锁环83与第一滑动件70的纵向移动保持一致。更具体地,弧形凹槽的截面可以呈t形,凸部可以为t型块。上面介绍的实施例,弧形凹槽设置在锁环83朝向第一滑动件70的端面上,除此之外,弧形凹槽也可以设置在锁环83的内侧,第一滑动件70上的特征部则以类似的方式设置,与该弧形凹槽相配合。在这种实施例中,锁环83及锁环内凸块831转动时,仅第二齿爪811与锁环内凸块831接合。
112.除了通过锁环83实现将第一滑动件70与第二滑动件60接合到一起,还可以采用其它方式,例如,第一滑动件70的近端设置卡扣,第二滑动件60的远端设置与卡扣相配合的卡槽,第一滑动件70移动至靠近第二滑动件60时,卡扣与卡槽卡接到一起,也可以实现第一滑动件70与第二滑动件60的接合。
113.在此需要说明的是,该手柄不是必须包括第二固定筒29。当该手柄仅包括第一固定筒28时,第一固定筒28上无需设置固定柱283。此时,旋钮82相对第一固定筒28可旋转地套设于第一固定筒28外,具体地,旋钮82和第一固定筒28可通过齿槽配合实现固定。在一些实施例中,隔挡件可以是设置于第一固定筒28的外周壁中部的弧形凸块,用于将第一活动筒40和第二活动筒30隔离开且进行纵向限位。在一些实施例中,第一固定筒28的近端的外周和远端的外周均可拆卸地设置限位环,隔挡件与两处限位环配合,进一步地对第一活动筒40和第二活动筒30的纵向移动进行限制。
114.上面对本发明提供的植入物回收驱动手柄作了介绍。在将回收管12、回收网121和捕捉的植入物拉入到如图1所示的导管鞘15中的至少部分行程中,图2a-图8b所示的手柄和图9a-图13d所示的手柄,第一滑动件70与第二滑动件60均做同步线性运动。在将回收管12、回收网121和捕捉的植入物拉入到如图1所示的导管鞘15中的至少部分行程中,图2a-图8b所示的手柄,由活动筒30做螺旋运动(螺旋运动为旋转运动与线性运动的复合运动)来提供驱动力,并将旋转运动转化为线性运动,用以带动第一滑动件70与第二滑动件60的同步线性运动;图9a-图13d所示的手柄,由第二活动筒30做旋转运动来提供驱动力,并将旋转运动转化为线性运动,用以带动第一滑动件70与第二滑动件60的同步线性运动。
115.因此,在将回收管12、回收网121和捕捉的植入物拉入到如图1所示的导管鞘15中的至少部分行程中,图2a-图8b手术的手柄和图9a-图13d所示的手柄,均通过将旋转运动转化为线性运动来实现对第一滑动件70与第二滑动件60的驱动。相比于直接推动第一滑动件70与第二滑动件60做线性运动的植入物回收驱动手柄,本发明提供的植入物回收驱动手柄更便于医护人员对第一滑动件70和第二滑动件60施加较大的纵向驱动力,有利于顺利将鞘管11、回收网121和捕捉的植入物拉入到如图1所示的导管鞘15中。
116.该植入物回收驱动手柄可以应用于经导管植入心脏瓣膜假体手术中的心脏瓣膜假体的回收,该植入物回收驱动手柄还可以应用于其它植入物的回收手术或者其它包含类似操作的手术中。
117.植入物回收装置
118.参照图2a-图2c、图7a-图7b和图9a-图9c,示出了一种植入物回收装置,该回收装置可包括回收网121、回收管12、鞘管11和上述的植入物回收驱动手柄。回收管12和鞘管11可滑动地设于管通道201内;鞘管11套设于回收管12外,回收管12的远端连接回收网121。鞘管11的近端连接第一滑动件70,回收管12的近端连接第二滑动件60。
119.在一些实施例中,该回收装置还包括内管131和设置在内管131近端的止血阀装置132,内管131穿设于回收管12内。一些情况下,与植入物相连接的定位导丝外未设置导管,定位导丝穿过内管131从止血阀装置132的近端延伸出。
120.在一些实施例中,如图4a所示,鞘管11的远端设有显影标记14,显影标记14采用不透射线的材料制成。通过设置显影标记14,有助于在植入物回收过程中,实时观察鞘管11与回收管12之间的相对滑动长度。为避免显影标记14脱落,可将显影标记14嵌入鞘管壁内,或
者紧密套接到鞘管11上,或者在鞘管11上设置浅槽以容纳显影标记14。显影标记14可为金属环。显影标记14的材质可为铂、金、铱、钯、铼、铑、钨、钽、银和锡。显影标记14也可以为含有不透射线颗粒的聚合物。不透射线的颗粒可为铂、金、铱、钯、铼、铑、钨、钽、银和锡,或者本领域常用的其他对比剂。聚合物选自pebax、聚醚氨酯、聚酯共聚物、烯烃衍生的共聚物、天然橡胶、合成橡胶、热塑性弹性体63、特种聚合物、聚氨酯和尼龙。
121.植入物回收方法
122.本发明提供了一种植入物回收方法,采用上述植入物回收驱动手柄,鞘管11外套设有如图1所示的导管鞘15。该回收方法包括:步骤s10,鞘管11向近端运动,回收管12的远端连接的回收网121从鞘管11中露出(释放)并展开;步骤s20,回收网121捕捉待回收的植入物;步骤s30,植入物、回收网121和回收管12均向近端移动,一起被回拉至如图1所示的导管鞘15内。
123.具体地,采用图2a-图2c所示的手柄回收植入物时,步骤s10,参考图6c,向近端拉动活动筒30,以驱使鞘管11向近端运动;步骤s30,参考图6d,转动活动筒30,驱使鞘管11、回收网121和回收管12一起向近端运动。
124.采用图7a-图7b所示的手柄回收植入物时,步骤s10,转动活动筒30,以驱使鞘管11向近端运动;步骤s30,继续转动活动筒30,驱使鞘管11、回收网121和回收管12一起向近端运动。
125.采用图9a-图9c所示的手柄回收植入物时,步骤s10,参考图12a-图12b、图13a-图13b,转动第一活动筒40,以驱使鞘管11向近端运动;步骤s30,参考图12c和图13c,先转动旋钮82使第一滑动件与第二滑动件接合,然后参考图12d和图13d,转动第二活动筒30,以驱使鞘管11、回收网121和回收管12向近端运动。
126.在上述的各种步骤s30中,如图6d、图12d和图13d所示,鞘管11与回收管12一起向近端移动,以便于将回收管12、鞘管11和回收网121一起拉入到如图1所示的导管鞘15中。
127.以上实施例所述的纵向具体是指手柄的长度方向。以上仅为本发明的几个实施例,本领域的技术人员依据申请文件公开的内容可以对本发明实施例进行各种改动或变型而不脱离本发明的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。